技术特征:
1.一种用于获得柱形物体的图像的系统,其特征在于,包括:机器人输送臂,其包括带有夹具的末端执行器,其中所述夹具是能调节的以夹住具有不同直径的柱形物体,并且其中所述机器人输送臂能沿x、y和z移动;用于接收柱形样品容器的平台,其中所述样品容器通过所述机器人输送臂放置在所述平台上;相机,其被定位成当所述柱形样品容器放置在所述平台上时获得所述柱形样品容器的图像,其中所述柱形样品容器以竖直取向放置在所述平台上,并且其中所述柱形样品容器带有标签,并且其中所述相机被放置以获得所述柱形样品容器所携带的所述标签的一张或多张图像;其中所述系统根据由所述相机获得的所述标签的所述一张或多张图像,构建所述标签的二维图像;并且其中,在获得所述标签的图像之后,所述柱形样品容器通过所述机器人输送臂从所述系统中移除。2.根据权利要求1所述的系统,其特征在于,其中所述柱形样品容器是血液培养瓶。3.根据权利要求1所述的系统,其特征在于,还包括旋转平台,所述柱形样品容器放置在所述旋转平台上。4.根据权利要求3所述的系统,其特征在于,其中所述相机在单帧中获得所述标签的图像。5.根据权利要求4所述的系统,其特征在于,其中所述相机与处理器通信。6.根据权利要求5所述的系统,其特征在于,其中所述处理器被编程为对从所述相机接收的所述图像应用极坐标变换。7.根据权利要求6所述的系统,其特征在于,其中所述处理器根据应用所述极坐标变换,输出变换后的图像。8.根据权利要求3所述的系统,其特征在于,其中所述旋转平台将所述柱形样品容器旋转360度,并且所述相机在n张图像中获得所述标签的图像,每张图像是在所述柱形样品容器旋转360度的预定部分时拍摄的。9.根据权利要求8所述的系统,其特征在于,其中所述360度的所述预定部分是45度。10.根据权利要求9所述的系统,其特征在于,其中将所述n张图像拼接在一起以获得所述标签的图像。11.根据权利要求1或3所述的系统,其特征在于,还包括安置在所述平台下方的滑槽。12.根据权利要求1或10所述的系统,其特征在于,其中闸门被放置在所述平台上,其中所述闸门能从第一位置操作到第二位置,在所述第一位置中所述柱形样品容器被支撑在所述平台上,在所述第二位置中所述柱形样品容器被允许穿过所述平台中的开口,所述开口是当所述闸门移动到所述第二位置时产生的。13.根据权利要求11所述的系统,其特征在于,其中所述滑槽接收处于大致竖直取向的所述柱形样品容器,并且使所述柱形样品容器易于进入大致水平取向。14.根据权利要求3至10中任一项所述的系统,其特征在于,其中所述柱形样品容器是血液培养瓶。15.根据权利要求14所述的系统,其特征在于,其中所述滑槽包括将所述血液培养瓶引
导到大致水平取向的倾斜坡道。16.根据权利要求15所述的系统,其特征在于,其中所述坡道是一对其间带有开口的倾斜轨道,其中在所述柱形样品容器从所述大致竖直取向枢转到所述大致水平取向时,所述血液培养瓶的颈部适配在所述倾斜轨道之间。17.根据权利要求11所述的系统,其特征在于,其中所述机器人输送臂的所述末端执行器抓住所述柱形样品容器的底部,并且其中当所述柱形样品容器处于水平位置时,所述机器人输送臂从所述滑槽输送所述柱形样品容器。18.根据权利要求1所述的系统,其特征在于,还包括辅助镜模块,所述辅助镜模块包括插置在所述柱形样品容器和所述相机之间的成角度的镜面化内表面,其中所述相机被定位成使得当所述柱形样品容器放置在所述平台上时所述相机能够捕获所述柱形样品容器的图像。19.根据权利要求18所述的系统,其特征在于,其中所述成角度的镜面化内表面包括两个成角度的侧镜,其中所述镜的面向所述柱形物体的侧面是反射性的,其中所述两个成角度的侧镜的所述成角度的镜面化内表面被配置成将光从反射表面引导到中心成角度镜上的反射表面,其中所述中心成角度镜上的所述反射表面被配置成将光导向所述相机。20.根据权利要求19所述的系统,其特征在于,其中第一成角度的侧镜的所述反射表面相对于从所述柱形物体到所述相机和镜头组件的轴线的角度为约 45度,并且第二成角度的侧镜的所述反射表面相对于从所述柱形物体到所述相机的轴线的角度为约-45度。21.根据权利要求20所述的系统,其特征在于,其中所述中心成角度镜包括第一成角度的反射表面和第二成角度的反射表面,其中所述第一成角度的反射表面和所述第二成角度的反射表面分别处于约 45度和约-45度。22.根据权利要求19所述的系统,其特征在于,其中第一成角度的侧镜的所述反射表面相对于从所述柱形物体到所述相机和镜头组件的轴线的角度为约 37度,并且第二成角度的侧镜的所述反射表面相对于从所述柱形物体到所述相机的轴线的角度为约-37度。23.根据权利要求22所述的系统,其特征在于,其中所述中心成角度镜包括第一成角度的反射表面和第二成角度的反射表面,其中所述第一成角度的反射表面和所述第二成角度的反射表面分别处于约 45度和约-45度。24.根据权利要求19所述的系统,其特征在于,其中第一成角度的侧镜的所述反射表面相对于从所述柱形物体到所述相机和镜头组件的轴线的角度为约 35度,并且第二成角度的侧镜的所述反射表面相对于从所述柱形物体到所述相机的轴线的角度为约-35度。25.根据权利要求24所述的系统,其特征在于,其中所述中心成角度镜包括第一成角度的反射表面和第二成角度的反射表面,其中所述第一成角度的反射表面和所述第二成角度的反射表面分别处于约 45度和约-45度。
技术总结
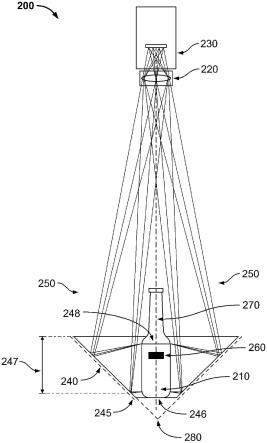
本申请涉及用于对容器进行成像的系统。一种可以自动且快速处理血液培养瓶的系统。这样的处理包括获得放置在血液培养瓶的圆柱形表面上的标签的图像。该系统还可以通过将样品水平与预先放置的基准进行比较来确定已经添加到血液培养瓶中的血液样品的量。血液培养瓶中的液体弯月面与基准之间的距离可以用于确定血容量。成像设备还可以检测血液培养瓶的内部情况,诸如泡沫的存在或血液培养瓶的颈部部分中培养基的存在。标签的图像是从由相机或扫描仪捕获的一张或多张图像中获得的。标签上的信息可以自动读取,并且因此不必手动处理血液培养瓶,从而提高了设备的吞吐量。从而提高了设备的吞吐量。从而提高了设备的吞吐量。
技术研发人员:F
受保护的技术使用者:BD科斯特公司
技术研发日:2022.03.09
技术公布日:2022/11/10
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。