1.本发明涉及一种根据权利要求1的前序部分所述的用于运行车辆制动系统的方法。关于现有技术,例如参考de 10 2017 006 692 a1。
背景技术:
2.尤其是在电动车辆和混合动力车辆、即具有电驱动单元(=电动机)的车辆中已知所谓的再生。在再生时,驱动轮的动能被电驱动单元、尤其被电机转换成电能。在此,电驱动单元以发电机方式运行。因此,在制动时通常作为摩擦热损失的能量的一部分可以以电能的形式馈送到电能储存器中、例如电池或电容器中并且随后被利用。同时,通过电机的发电机式运行实现制动车辆的作用,所谓的再生制动。这也被称为再生制动或者说回馈制动。
3.为了实现再生制动,在电驱动单元上调整再生力矩,所述再生力矩是制动力矩并且由此使车辆减速。
4.在此,尤其是在电动车辆中已知的是,使用所述的再生,其方式是:在检测到制动愿望、例如通过车辆乘员操纵制动踏板实现的制动愿望时,调整再生力矩(通常根据制动踏板的通过车辆乘员操纵制动踏板所经过的制动踏板行程),并且由此有针对性地按期望的制动功率制动车辆。
5.此外,已知的是,所述的再生也可在驱动单元的惯性行驶运行中或者说拖曳运行中用于使车辆减速。在此,通常在车辆乘员结束或减弱对加速踏板的操纵时、即例如当车辆乘员减小加速踏板操纵或完全离开加速踏板时,调整在驱动单元上所谓的惯性行驶再生力矩(也作为拖曳再生力矩已知)。车辆由此被制动。通常,惯性行驶制动力矩在车辆乘员对加速踏板的操纵结束时达到其最大值(所谓的目标惯性行驶再生力矩)。
6.为了启动尽可能有效的制动过程,从现有技术中已知的是,在检测到减速愿望之后立即调整或者说施加所述再生力矩。de 10 2017 006 692 a1例如公开了一种方法,在该方法中特别旨在通过快速调整再生力矩来避免延迟地激活再生过程。在此,除了所述惯性行驶再生(通过减少或结束对加速踏板的操纵)之外,同时进行所述再生制动。
7.这种直接紧接在检测到减速愿望之后快速调整或者说叠加再生力矩在一些工况下引起不稳定的制动行为,车辆驾驶员或车辆乘员感觉所述不稳定的制动行为不舒适。这种不稳定的制动行为原因在于驱动装置“落后”,所述驱动装置在惯性行驶运行开始时仍需要一定的持续时间以实现惯性行驶力矩。对于车辆驾驶员来说,这种时间偏移被感觉是不稳定的。于是,车辆的制动行为在时间上与制动踏板的操纵稍微错开并且因此与由车辆驾驶员预期的效果不同。此外,这种制动行为可能导致可能的过度制动,因为车辆驾驶员直至实现惯性行驶力矩或直至开始调整惯性行驶力矩一直认为,车辆对其操纵不足地响应并且于是启动更强的制动操纵(也被称为两相制动)。
技术实现要素:
8.因此,本发明的任务是,提供一种用于运行车辆制动系统的方法,以便使车辆的利
用再生制动的减速行为更可预测并且因此改善车辆的行驶行为。
9.该任务的解决方案通过一种具有权利要求1的特征的方法以及通过一种根据权利要求7的制动系统、一种根据权利要求8的电动车辆和一种根据权利要求9的混合动力车辆得出。有利的设计方案和进一步改进方案是从属权利要求的内容。
10.为了解决所述任务,提出一种用于运行车辆制动系统的方法,其中,车辆包括至少一个可用于车辆再生制动的电机。
11.车辆优选是机动车、尤其是双车辙的机动车。然而,本发明在单车辙的车辆、例如摩托车等中也是可能的。
12.此外,所述电机优选是用于驱动车辆的至少一个轴或轮的电动机。
13.在本发明的意义中,所述的再生制动理解为上面已经描述的通过加载电机的再生力矩实现的制动启动。在此,所加载的再生力矩的大小以及因此车辆通过再生制动的减速度的大小优选取决于由驾驶员操纵的制动踏板行程。
14.此外规定,车辆包括在惯性行驶运行中可用于惯性行驶制动的驱动单元。
15.该驱动单元在此优选是已经提到的电机。替代地或附加地,驱动单元也可以是内燃机。在任何情况下都必须涉及能在惯性行驶运行中运行的并且能在该惯性行驶运行中执行惯性行驶制动(也称为拖曳再生或者说惯性行驶再生)的驱动单元。在此,驱动单元必须能实现预定的目标拖曳再生或者说预定的目标惯性行驶制动力矩。
16.为了实现惯性行驶再生,在驱动单元上调整所谓的惯性行驶再生力矩(也作为拖曳再生力矩已知)。车辆由此被制动。通常,惯性行驶制动力矩在对加速踏板的操纵结束时在确定的时间段之后达到其最大值,上述目标惯性行驶再生或者说目标拖曳再生。何时达到该最大值在很大程度上取决于驱动装置中相应的应用。例如,在纯电动车辆中,该时间段通常比在具有混合动力驱动装置的车辆中略短,这由内燃机决定。
17.在此,尤其是当车辆驾驶员撤离加速踏板或者说完全结束加速操纵时,驱动单元的惯性行驶运行开始。因此,如果例如车辆驾驶员较少操纵加速踏板或者说油门踏板或者车辆驾驶员结束对加速踏板或者说油门踏板的踏板操纵,则驱动单元便被置于惯性行驶运行并且惯性行驶制动或者说所谓的拖曳再生开始;车辆由此减速。然而直到在驱动单元上实现拖曳力矩或者说惯性行驶力矩,经过了确定的持续时间,也就是说,惯性行驶再生或者说拖曳再生延迟几毫秒至几秒才出现。
18.据此,在所述方法的第一步骤中规定,例如通过控制单元或确定的传感器检测车辆的减速启动。
19.这种减速启动例如可以是车辆驾驶员对制动踏板的操纵。替代地或同时地,这种减速启动可以是自动的或者说独立的车辆制动,例如当车辆在自主行驶模式或制动模式中时(例如在自动距离调节激活的情况下)。
20.同时检测能再生的行驶工况。所述检测同样通过合适的传感器或通过控制单元的存储的预设定进行。
21.在本发明的意义上,能再生的行驶工况指的是如下行驶状态,在所述行驶状态中进行上述的制动再生或者说再生制动,也就是说在所述行驶状态中以再生力矩加载所述电机并且由此使所述车辆减速。
22.这种能再生的工况例如在载荷变换时给出。如果电机、尤其是作为驱动单元的电
动机处于正力矩(即驱动力矩)并且驾驶员然后离开加速踏板,而驾驶员随后直接想要通过操纵制动踏板主动地制动车辆,则发生快速的载荷变换。
23.能再生的行驶工况的其他例子是由车辆驾驶员通过操纵制动踏板主动启动制动、通过操纵制动踏板投放acc或巡航控制或者所谓的双脚驾驶员。在所述的双脚驾驶员的情况下,除了制动踏板之外同时操纵加速踏板。另一能再生的行驶工况例如是结束发动机关闭-滑行,即通过操纵制动踏板来制动在内燃机关闭的情况下滑行的车辆。
24.接着规定,将所述的驱动单元、优选电机本身置于惯性行驶运行中,也就是说在驱动单元上调整惯性行驶再生力矩或者说拖曳再生力矩,所述惯性行驶再生力矩或者说拖曳再生力矩使所述车辆减速。为了实现所述的目标拖曳再生或者说目标惯性行驶再生,也就是说为了实现最大的拖曳再生力矩或者说惯性行驶再生力矩,驱动单元需要一定的时间。为了启动惯性行驶运行,驱动单元也需要短的持续时间,也就是说在驾驶员离开或撤离加速踏板或者说在控制单元的拖曳再生的启动指令与拖曳再生的实际实现之间出现时间延迟。
25.然后,当前的实际驱动力矩在一定的时间段内被向下调节到最大的或者说所期望的目标拖曳再生力矩。
26.接在启动驱动单元的所述惯性行驶运行之后规定激活或者说启动所述的再生制动;也就是说,在所述电机上、优选在作为驱动单元的所述电动机上调整再生力矩,并且车辆由此经受进一步的减速。在此规定,通过再生制动和惯性行驶制动应实现目标总再生,即目标总再生力矩。在此,该目标总再生力矩是期望的最终要设定的制动力矩。目标总再生力矩在此通过叠加惯性行驶再生力矩和制动再生力矩来实现。
27.根据本发明规定,只有从实际驱动力矩或者说当前的实际惯性行驶再生力矩与目标惯性行驶再生力矩之间的差低于预定的限值起才通过在电机上调整再生力矩进行再生制动。在车辆的惯性行驶运行中,实际驱动力矩相应于实际惯性行驶再生力矩。这种差在本发明的意义上被称为所谓的激活偏差。在此,激活再生制动、即调整再生力矩根据本发明取决于实际驱动力矩与目标惯性行驶再生力矩之间的绝对差。也就是说,只有当在驱动单元的实际驱动力矩与目标惯性行驶再生力矩或者说目标拖曳再生力矩之间仅还存在确定的激活偏差时,才激活再生制动。因此,在实际驱动力矩和目标拖曳再生力矩之间的通过所述激活偏差描述的差必须低于预定的阈值,以便要求或者说激活或者说启动再生制动。
28.在本发明的一种替代的实施方式中,只有当驱动单元在惯性行驶运行中低于确定的最小实际驱动力矩或达到确定的实际惯性行驶再生力矩时,在电机上才调整再生力矩,以便激活再生制动。在这种情况下,激活再生制动、即调整再生力矩在此根据本发明与实际驱动力矩相对于目标惯性行驶再生力矩的相对值有关。
29.从所述确定的最小实际驱动力矩起激活再生制动,所述确定的最小实际驱动力矩可以为目标惯性行驶再生力矩的0-100%、特别优选为目标惯性行驶再生力矩或者说目标拖曳再生力矩的60-80%。原则上可想到0-100%的值域,其中,相对值特别地依据目标拖曳再生力矩的绝对水平。这不仅可以在车辆内部(通过不同的行驶模式)而且可以在不同的车辆(电动车辆、混合动力车辆、轻度混合动力车辆等)之间非常不同地形成。
30.在电动机作为驱动单元以及作为电机的情况下,例如由该电动机首先要求再生制动或再生力矩,如果电动机本身已经实现了自身的目标惯性行驶力矩的绝大部分(优选惯
性行驶再生力矩的60-80%)。
31.本方法尤其具有的优点是,车辆的行驶行为(加速行为)和制动行为对于车辆乘员是可更好地估计的并且由此可防止误制动(例如过度制动或两相制动)。通过根据本发明的方法,车辆的减速行为变得更和谐并且由此对于车辆驾驶员而言感觉为更舒适。
32.除了根据本发明的方法之外,根据权利要求7还要求保护一种用于执行根据本发明的方法的制动系统,并且根据权利要求9和10还要求保护一种包括这种制动系统的电动车辆和混合动力车辆。
33.根据本发明的制动系统是能平衡的制动系统(也作为集成的制动系统已知)。这种能平衡的制动系统与传统的制动系统不同地能够用于在摩擦制动和制动再生之间来回平衡或者摇摆。特别优选地涉及踏板解耦的制动系统(也称为所谓的“线控”制动操纵),在该制动系统中制动力矩在再生和摩擦制动之间的平衡在制动踏板中不明显。
34.根据本发明的制动系统在此包括至少一个电机,所述电机构成为,使得所述电机能够执行车辆的再生制动。
35.如上面已经提到的,该电机尤其是电动机,该电动机用作用于车辆的驱动单元。
36.此外,制动系统包括至少一个驱动单元,所述驱动单元构成为,使得所述驱动单元能在驱动单元的惯性行驶运行中执行车辆的惯性行驶制动。
37.该驱动单元可以是已经提到的电机,尤其是作为车辆的驱动单元的电动机。替代地,如上面已经提出的那样,同样可想到的是,驱动单元是附加的驱动单元、例如内燃机,该附加的驱动单元在惯性行驶运行中通过惯性行驶再生力矩使车辆减速或制动。
38.设置有至少一个控制单元和/或至少一个传感器单元(例如已知的并且已经存在于车辆中的制动调节系统,例如dsc),所述控制单元和/或传感器单元设置用于检测车辆的减速启动和能再生的行驶工况。
39.此外,根据本发明的制动系统包括至少一个(附加的或已经提到的)控制单元,该控制单元设置用于启动车辆的再生制动或在电机上、尤其在电动机上调整再生力矩。所述控制单元在此构造为,使得所述控制单元只有从达到预定的实际驱动力矩起或从达到或低于在驱动单元的当前的实际驱动力矩与驱动单元的目标惯性行驶再生力矩之间的预定的差起才激活再生制动。
40.在所要求保护的第一实施方式中,所述制动系统布置在电动车辆中。在此,根据本发明的电动车辆包括用于执行根据本发明的方法的所述制动系统。
41.在此,所述电机构成为车辆的电动驱动装置(也称为电动机)并且负责为车辆的驱动装置提供能量。在此,通过电动驱动装置不仅实现所述的惯性行驶制动而且实现再生制动。因此,为了实现预定的目标总再生力矩或者说预定的总再生,首先将电动驱动装置置于惯性行驶运行中。从达到实际驱动力矩与目标惯性行驶再生之间的预定的差起,通过在电动驱动装置上调整再生力矩来启动或者说激活再生制动。通过所述的目标惯性行驶再生和随后叠加的再生制动,实现所期望的目标-总再生或目标总再生力矩并且与此相应地制动车辆。
42.电机于是这样构造为,使得所述电机不仅可以在惯性行驶运行中(在所述惯性行驶运行中进行惯性行驶制动)、而且可以在再生运行中(在所述再生运行中进行车辆的再生制动)运行。在此,再生运行和惯性行驶运行可以同时或者说并排进行。
43.此外,还要求保护一种混合动力车辆,所述混合动力车辆包括用于实施根据本发明的方法的根据本发明的所述制动系统。
44.在此,该混合动力车辆包括至少一个电机,尤其是电动驱动装置,以及另一驱动单元。在此,车辆优选不仅可以由电动驱动装置而且可以由所述另一驱动单元驱动。也可行的是,混合动力车辆仅由这两个中的一个驱动、尤其仅由电机驱动。在最后提到的情况下,附加的驱动单元可以用于给电机的能量储存器、例如电容器或电池充电。
45.然而,需要的是,电机或附加的驱动单元构成为,使得车辆能被置于再生运行中以及惯性行驶运行中,以便实现所述的目标总再生。
46.这些特征和其他特征除了从权利要求书和说明书中也从附图中得知,其中,各个特征分别单独地或多个呈子组合的形式在本发明的一个实施方式中实现,并且可以构成有利的以及本身可保护的实施方式,针对这些实施方式在此要求保护。
附图说明
47.下面根据实施例进一步阐述本发明。
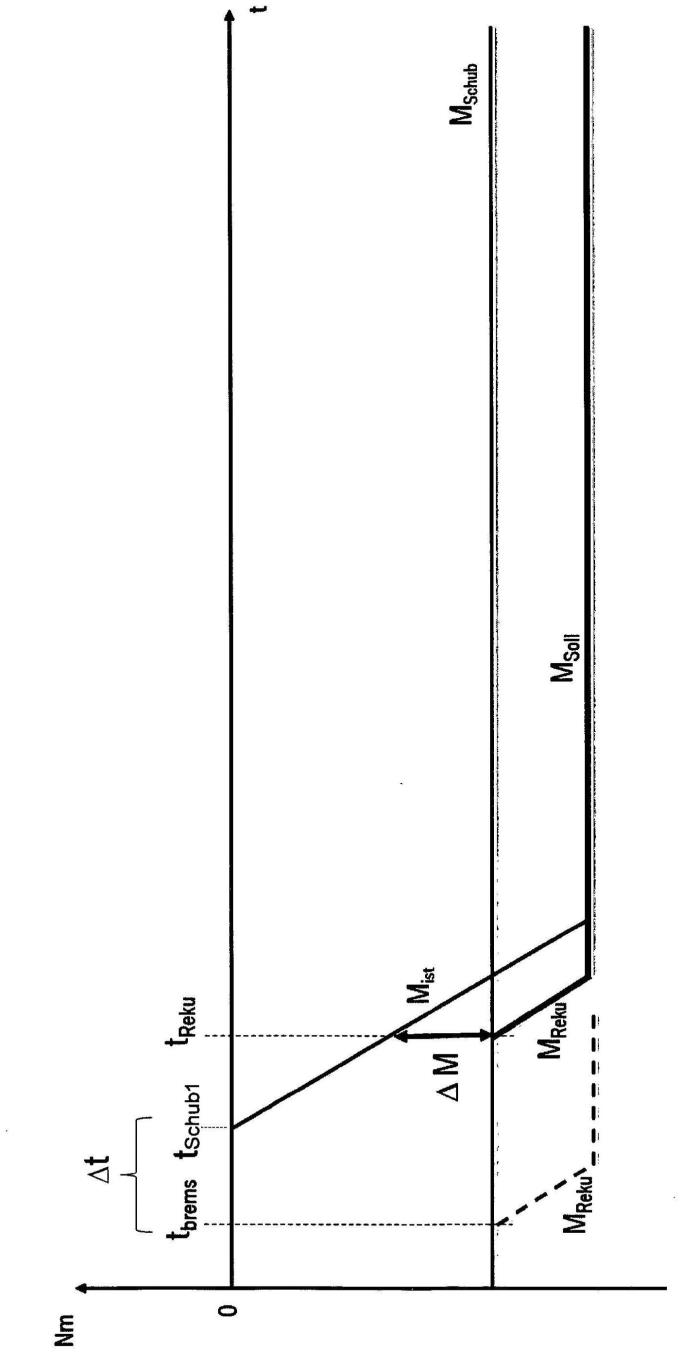
48.唯一的图1在此示出以nm为单位的当前制动力矩(m
ist
)的变化曲线的曲线图,所述当前制动力矩在根据本发明的方法期间根据时间t作用到车辆上。
具体实施方式
49.为了执行所述方法,该实施例的制动系统包括用于驱动车辆的电动机,该电动机可以在惯性行驶运行中通过惯性行驶力矩实现车辆的惯性行驶制动,并且可以在再生运行中实现车辆的再生制动。
50.在初始工况下,电动机的驱动力矩m
ist
处于正范围内(未在图表中画出)。
51.在该方法的第一步骤中,检测车辆的减速启动或者说减速愿望,例如通过操纵车辆的制动踏板或通过减弱操纵或结束操纵加速踏板。这种减速愿望或这种减速启动在时间点t
brems
进行。在下一步骤中检测能再生的行驶工况,也就是说,通过合适的传感机构或在车辆中的计算确定应进行再生制动。
52.在检测到车辆驾驶员的减速启动或减速愿望之后,启动电动机的惯性行驶运行,其方式是:将实际驱动力矩m
ist
带到目标惯性行驶再生力矩m
schub
。然而,在许多行驶工况中,在已检测到减速启动或减速愿望时的时间点t
brems
与实际启动惯性行驶运行、即实际通过电动机的惯性行驶运行启动负驱动力矩m
ist
时的时间点t
schub1
之间存在时间延迟δt。
53.如果直接在在时间点t
brems
检测到减速期望或减速启动之后调整再生制动或者说再生力矩m
reku
,如这在图1中以虚线(m
reku
)所示,则产生不稳定的制动行为,因为再生制动已经开始,而惯性行驶再生由于时间延迟δt还没有开始。所述制动行为对于车辆驾驶员或车辆乘员来说感觉为不稳定和不舒服。
54.为了避免所述缺点而规定,只有从达到实际驱动力矩或者说实际惯性行驶再生力矩m
ist
与目标惯性行驶再生力矩m
schub
之间的预定的差δm起才调整用于激活再生制动的再生力矩m
reku
。该差也被称为激活偏差δm。
55.为此,在达到激活偏差时的时间点t
reku
将再生力矩m
reku
叠加或调整于电动机上。通过所述调整再生力矩m
reku
,激活再生制动。
56.总再生力矩或者说总制动力矩m
soll
便通过调整的目标惯性行驶再生力矩m
schub
和调整的再生力矩m
reku
来实现。
57.因此,实现了稳定的并且对于车辆乘员来说感觉为舒适的制动行为。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。