基于低轨导航增强的ppp-ins组合导航定位方法及系统
技术领域
1.本发明涉及低轨卫星导航技术领域,具体涉及基于低轨导航增强的ppp-ins组合导航定位方法及系统。
背景技术:
2.精密单点定位-惯性导航系统(ppp-ins组合导航)目前是导航领域的热点研究问题,其广泛应用于自动驾驶、高速运动物体定位、测姿领域中。ins系统在gnss信号不连续、受干扰情况下可以提供短时可靠的较高精度的定位结果,但ins系统定位精度会随着时间的累计逐渐发散,需要gnss定位系统对其进行定时段的纠偏。目前ppp导航定位主要是通过igs、code、esa等gnss数据分析中心所提供的精密轨道、钟差产品以及大气改正信息产品等来快速固定gnss观测值的模糊度以实现高精度定位。由于大部分数据分析中心的精密数据产品都是事后产品、并且最快产品更新间隔为15分钟。要满足ppp-ins定位技术对高精度数据产品时效性的需求,只能通过数据产品的外推模型获取对应时间的数据产品信息,通过外推模型得到的数据产品信息的精度和可靠性有所降低。而随着低轨卫星在自主导航和导航增强领域的价值逐渐显现,通过低轨卫星来提供连续的定位增强信息和增强信号,实现快速收敛的ppp(precise point positioning)定位,可有效解决ppp-ins定位目前存在的一些问题。
3.申请号为“cn202010584388.x”的公开文本,提出一种利用gnss观测值与ins观测值通过松组合方式组建观测方程,使用卡尔曼滤波对观测方程进行滤波估计得到终端定位信息。申请号为“cn202010549660.0”的公开文本,提出一种在现有的gnss/ins紧组合的滤波器的基础上增加一个深度神经网络模型,实现对卡尔曼滤波器的修正,以此实现输出gnss/ins紧组合定位结果。申请号为“cn202010730262.9”的公开文本,提出一种利用低轨卫星导航增强信号和igs等数据分析中心的gnss精密基础数据产品,弥补卫星导航系统易受环境影响信号失锁的缺陷、实现gnss/ins组合定位。申请号为“cn202010380332.2”的公开文本,提出一种采用核fisher判别式对数据进行处理,并通过one-class svm模型进行训练,在此基础上利用d-s证据理论将bp神经网络和改进的动态粒子群优化bp神经网络的故障诊断进行融合,实现ins/gps组合导航的故障检测与诊断的方法。申请号为“cn201810052512.0”的公开文本,提出一种利用小波变换等滤波方法对雷达/imu输出数据进行预处理,根据不同传感器的工作原理建立误差模型从而提高车辆安全驾驶性能。
4.然而,以上现有技术ppp-ins定位主要是通过采用igs、code等数据分析中心的高精度导航基础数据产品实现定位,均是对观测数据的后处理;其定位、测姿精度受到数据产品的时效性影响很大,存在无法实现实时且高精度定位的问题。
技术实现要素:
5.本发明所要解决的技术问题是igs等数据分析中心无法提供实时高精度定位所需的数据产品,而目前ppp-ins定位系统只能采用igs等数据中心提供的事后高精度数据产品
采用外推模型以获得实时的精度有所衰减的定位基础数据产品,即存在无法实现实时且高精度定位的问题。
6.本发明目的在于提供基于低轨导航增强的ppp-ins组合导航定位方法及系统,在使用了低轨卫星增强信号的基础上,本发明添加低轨导航增强信息和采用紧组合的方式确定观测方程,并通过不同的确权方法最终解算出终端位置信息。本发明是一种将gnss导航系统与低轨卫星(leo)信号增强和信息增强相融合已达到满足自动驾驶、高速运动物体对定位精度、测姿精度的数据需求。
7.本发明通过下述技术方案实现:
8.第一方面,本发明提供了基于低轨导航增强的ppp-ins组合导航定位方法,该方法包括:
9.实时获取低轨卫星数据和ins观测数据,并将低轨卫星数据和ins观测数据进行紧组合,确定定位观测方程;
10.采用随机模型对定位观测方程进行解算,得到终端的初步位置信息(即粗略位置信息);
11.实时获取低轨增强信息、gnss观测值和ins观测数据,并将低轨增强信息、gnss观测值和ins观测数据进行紧组合,确定紧组合观测方程;
12.根据低轨增强信息和初步位置信息,确定gnss整周模糊度;并采用随机模型,对紧组合观测方程进行解算,并结合卡尔曼滤波进行参数估计,确定终端的进一步位置信息;
13.根据进一步位置信息,对初步位置信息进行反馈与纠偏,得到终端的完整可靠的最终位置信息。
14.进一步地,该方法还包括:
15.将最终位置信息传递给定位终端,以供其他系统进行判断和操作。
16.进一步地,低轨卫星数据包括多普勒观测值和低轨卫星测距信号观测值;
17.ins观测数据包括ins加速度观测值和ins角速度观测值。
18.进一步地,定位观测方程指的是ppp中载波和伪距的消电离层组合观测值线性化后的方程,定位观测方程的表达式为:
19.p
if
=αp1-βp2=|pr-ps| μδpr-c(tr-ts) ts ε
p
ꢀꢀꢀ
(1)
20.l
if
=αl1-βl2=|pr-ps| μδpr-n
if-c(tr-ts) ts ε
l
ꢀꢀꢀ
(2)
21.式中,p和l分别表示gnss伪距和载波观测值;α和β分别表示消电离层组合(ionosphere-free,if)系数;pr、ps分别表示地心地固坐标系中接收机和卫星的位置(含低轨卫星播发的gnss高精度卫星轨道);||表示模运算;μ表示接收机至卫星的方向余弦向量;δpr表示接收机位置改正向量;c表示真空中光速;tr、ts分别表示接收机和卫星钟差(含低轨卫星播发的高精度位置钟差);n
if
表示消电离层组合模糊度(单位是m);ts表示沿信号传播路径的对流层延迟(单位是m);ε表示电离层组合伪距和载波消噪声。
22.进一步地,紧组合观测方程的表达式为:
[0023][0024][0025]
式中,p
ins
表示由ins预推的e系下接收机位置;c1表示将n系的位置改正数转换到e
系下;δp
ins
表示相对于imu中心的位置改正数;θ表示姿态向量;δtr和δ
wztd
分别表示接收机钟差改正数和对流层湿延迟残余误差。
[0026]
进一步地,结合卡尔曼滤波进行参数估计的公式为:
[0027][0028]
式中,xk和i分别表示增益矩阵和单位矩阵,rk表示观测向量z的先验方差,其中:
[0029][0030]
式中,q表示状态参数动态噪声先验方差阵;φ
k,k-1
表示k-1至k历元时刻状态转移矩阵。
[0031]
进一步地,该方法适应的场景包括:
[0032]
a、低轨导航增强信息实现ppp高精度快速收敛;
[0033]
b、ins融合低轨卫星测距信号观测值、多普勒观测值确定终端的定位信息;
[0034]
c、ppp-ins融合低轨卫星数据源在自动驾驶、高速移动物体定位、测姿领域。
[0035]
第二方面,本发明又提供了基于低轨导航增强的ppp-ins组合导航定位系统,该系统支持的基于低轨导航增强的ppp-ins组合导航定位方法;该系统包括:
[0036]
第一实时获取单元,用于实时获取低轨卫星数据和ins观测数据;
[0037]
定位观测方程确定单元,用于将低轨卫星数据和ins观测数据进行紧组合,确定定位观测方程;
[0038]
初步位置信息解算单元,用于采用随机模型对定位观测方程进行解算,得到终端的初步位置信息(即粗略位置信息);
[0039]
第二实时获取单元,用于实时获取低轨增强信息、gnss观测值和ins观测数据;
[0040]
紧组合观测方程确定单元,用于将低轨增强信息、gnss观测值和ins观测数据进行紧组合,确定紧组合观测方程;
[0041]
进一步位置信息解算单元,用于根据低轨增强信息和初步位置信息,确定gnss整周模糊度;并采用随机模型,对紧组合观测方程进行解算,并结合卡尔曼滤波器确定终端的进一步位置信息;
[0042]
修正单元,用于根据进一步位置信息,对初步位置信息进行反馈与纠偏,得到终端的完整可靠的最终位置信息。
[0043]
第三方面,本发明又提供了一种计算机设备,包括存储器、处理器以及存储在存储器中并可在处理器上运行的计算机程序,处理器执行计算机程序时实现所述的基于低轨导航增强的ppp-ins组合导航定位方法。
[0044]
第四方面,本发明又提供了一种计算机可读存储介质,计算机可读存储介质存储有计算机程序,计算机程序被处理器执行时实现所述的基于低轨导航增强的ppp-ins组合导航定位方法。
[0045]
本发明与现有技术相比,具有如下的优点和有益效果:
[0046]
本发明基于低轨导航增强的ppp-ins组合导航定位方法及系统,本发明通过低轨卫星提供高精度、高可靠性的实时gnss增强信息和更高落地功率的测距信号、以及多普勒观测数据、并且在不同定位测姿环节结合ins观测数据实现模糊度固定的ppp-ins定位效
果,弥补采用igs数据分析中心无法提供实时数据产品、进而降低ppp-ins定位系统的定位精度这一缺点。使得ppp-ins定位技术在自动驾驶、高速运动物体定位、测速、测姿领域能够实现更广、更深层面的应用。
附图说明
[0047]
此处所说明的附图用来提供对本发明实施例的进一步理解,构成本技术的一部分,并不构成对本发明实施例的限定。在附图中:
[0048]
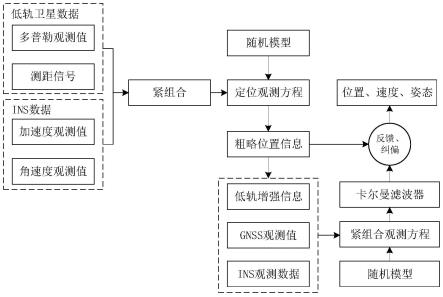
图1为本发明基于低轨导航增强的ppp-ins组合导航定位方法的流程图。
[0049]
图2为本发明基于低轨导航增强的ppp-ins组合导航定位系统的结构示意图。
具体实施方式
[0050]
为使本发明的目的、技术方案和优点更加清楚明白,下面结合实施例和附图,对本发明作进一步的详细说明,本发明的示意性实施方式及其说明仅用于解释本发明,并不作为对本发明的限定。
[0051]
实施例1
[0052]
基于背景技术中现有技术ppp-ins定位要么是通过不同的滤波算法和不同的地面传感器数据的融合来实现gnss/ins组合导航定位的;要么是采用了低轨卫星增强信号,并通过松组合的方式进行gnss/ins组合导航定位。即现有技术主要是通过采用igs、code等数据分析中心的高精度导航基础数据产品实现定位,均是对观测数据的后处理;其定位、测姿精度受到数据产品的时效性影响很大,存在无法实现实时且高精度定位的问题。
[0053]
针对现有技术中的以上问题,本发明设计了基于低轨导航增强的ppp-ins组合导航定位方法,在使用了低轨卫星增强信号的基础上,本发明添加低轨导航增强信息和采用紧组合的方式确定观测方程,并通过不同的确权方法最终解算出终端位置信息。本发明方法适应的场景包括:a、低轨导航增强信息实现ppp高精度快速收敛;b、ins融合低轨卫星测距信号观测值、多普勒观测值确定终端的定位信息;c、ppp-ins融合低轨卫星数据源在自动驾驶、高速移动物体定位、测姿领域。
[0054]
如图1所示,本发明基于低轨导航增强的ppp-ins组合导航定位方法,低轨卫星能够播发类似于gnss的测距信号、并具有spt功能。该方法包括:
[0055]
步骤1,实时获取低轨卫星数据和ins观测数据,并将低轨卫星数据和ins观测数据进行紧组合,确定定位观测方程;低轨卫星数据包括多普勒观测值和低轨卫星测距信号观测值;ins观测数据包括ins加速度观测值和ins角速度观测值。
[0056]
步骤2,采用随机模型对定位观测方程进行解算,得到终端的初步位置信息(即粗略位置信息);
[0057]
步骤3,实时获取低轨增强信息、gnss观测值和ins观测数据,并将低轨增强信息、gnss观测值和ins观测数据进行紧组合,确定紧组合观测方程;
[0058]
步骤4,根据低轨增强信息和初步位置信息,确定gnss整周模糊度;并采用随机模型,对紧组合观测方程进行解算,并结合卡尔曼滤波进行参数估计,确定终端的进一步位置信息;
[0059]
步骤5,根据进一步位置信息,对初步位置信息进行反馈与纠偏,得到终端的完整
可靠的最终位置信息;
[0060]
步骤6,将最终位置信息传递给定位终端,以供其他系统进行判断和操作。
[0061]
具体地,定位观测方程指的是ppp中载波和伪距的消电离层组合观测值线性化后的方程,定位观测方程的表达式为:
[0062]
p
if
=αp1-βp2=|pr-ps| μδpr-c(tr-ts) ts ε
p
ꢀꢀꢀ
(1)
[0063]
l
if
=αl1-βl2=|pr-ps| μδpr-n
if-c(tr-ts) ts ε
l
ꢀꢀꢀ
(2)
[0064]
式中,p和l分别表示gnss伪距和载波观测值;α和β分别表示消电离层组合(ionosphere-free,if)系数;pr、ps分别表示地心地固坐标系中接收机和卫星的位置(含低轨卫星播发的gnss高精度卫星轨道);||表示模运算;μ表示接收机至卫星的方向余弦向量;δpr表示接收机位置改正向量;c表示真空中光速;tr、ts分别表示接收机和卫星钟差(含低轨卫星播发的高精度位置钟差);n
if
表示消电离层组合模糊度(单位是m);ts表示沿信号传播路径的对流层延迟(单位是m);ε表示电离层组合伪距和载波消噪声。
[0065]
此外,多普勒观测值可有效改善ppp/ins紧组合中imu传感器误差估计精度,其线性化后的观测方程为:
[0066][0067]
式中,表示伪距变化率;vr和vs分别表示卫星和接收机对地速度向量;δvr表示接收机速度改正向量;和分别表示接收机钟速和卫星钟速;εd表示多普勒观测噪声。
[0068]
在ppp/ins紧组合数据处理时,需要考虑因参考中心不同而引起的杆臂误差。通常可采用参数估计的方法和精确测量的方法,本发明采用精确量测出载体坐标系(b,forward-right-down)中imu中心至接收机参考中心的杆臂值(ιb),通过公式(4)和公式(5)分别将力学编排解算的导航系(n,north-east-down)中imu参考中心的位置和转换至gnss接收机中心的位置和速度
[0069][0070][0071]
式中,表示由b系到n系的姿态旋转矩阵;dr表示将导航系中的杆臂转换成地理坐标的旋转矩阵;表示n系相对于惯性系(i)的旋转在n系的投影;
×
表示叉乘;表示陀螺的角速率。
[0072]
由公式(1)-公式(3),可得ppp/ins紧组合的观测模型为:
[0073][0074]
式中,z表示由ins预推gnss观测值与gnss实际观测值间作差得到的观测信息向量,r表示z的先验方差阵;p
if,ins
,l
if,ins
分别表示利用ins的位置和卫星位置计算出的伪距和载波消电离层组合的预推值。
[0075]
由公式(1)和公式(2)等式右项并结合公式(4)得到线性化后的观测方程,即紧组合观测方程的表达式为:
[0076][0077][0078]
式中,p
ins
表示由ins预推的e系下接收机位置;c1表示将n系的位置改正数转换到e系下;δp
ins
表示相对于imu中心的位置改正数;θ表示姿态向量;δtr和δ
wztd
分别表示接收机钟差改正数和对流层湿延迟残余误差。
[0079]
由公式(31)和公式(5)可推导出ins的速度和卫星速度信息计算的伪距变化率信息其线性化后的方程表示为:
[0080][0081]
式中:式中:表示n系到e系的转移矩阵;和表示接收机和卫星钟差改正数。
[0082]
根据公式(7)—公式(9),可得公式(6)中设计矩阵h以及对应状态向量x的最终形式:
[0083][0084]
结合卡尔曼滤波进行参数估计的公式为:
[0085][0086]
式中,xk和i分别表示增益矩阵和单位矩阵,rk表示观测向量z的先验方差,其中:
[0087][0088]
式中,q表示状态参数动态噪声先验方差阵;φ
k,k-1
表示k-1至k历元时刻状态转移矩阵。
[0089]
采用一阶高斯-马尔科夫模型、随机游走模型和随机常数模型分别描述imu传感器误差、对流层天顶湿延变化迟参数和载波模糊度的时间变化规律:
[0090]
xk=x
k-1
e-δt/t
ω
k-1
,ω
k-1
~n(0,2σ2δt/t)
ꢀꢀꢀ
(13)
[0091]
xk=x
k-1
ω
k-1
,ω
k-1
~n(0,q1δtk)
ꢀꢀꢀ
(14)
[0092]
xk=x
k-1
ω
k-1
,ω
k-1
~n(0,0)
ꢀꢀꢀ
(15)
[0093]
式中,δtk和t分别表示imu采样间隔和相关时间;σ表示驱动噪声ω的先验方差;q表示对流层湿延迟动态噪声ω的谱密度。
[0094]
基于目前ppp-ins定位主要是通过采用igs、code等数据分析中心的高精度导航基础数据产品实现定位的,其定位、测姿精度受到数据产品的时效性影响很大。本发明在此基础提出不同的三点关键之处在于:
[0095]
(1)在原来仅通过ins加速度观测值、角速度观测值确定终端的初略位置信息的基础上添加了低轨卫星测距信号观测值、多普勒观测值等多种数据类型、并建立了随机模型,最终提供终端的初步位置信息;
[0096]
(2)ppp模糊度固定不同于igs、code数据分析中心所使用的事后数据产品,而是采用的实时性更高的低轨卫星播发的gnss增强信息。结合增强信息和终端的粗略位置信息,
使用确权模型,辅助实现快速的gnss模糊度固定;
[0097]
(3)将gnss观测值、低轨卫星增强信息以及ins观测数据组成紧组合观测方程,使用卡尔曼滤波器确定终端最终的定位、测姿结果。
[0098]
本发明通过低轨卫星提供高精度、高可靠性的实时gnss增强信息和更高落地功率的测距信号、以及多普勒观测数据、并且在不同定位测姿环节结合ins观测数据实现模糊度固定的ppp-ins定位效果,弥补采用igs数据分析中心无法提供实时数据产品、进而降低ppp-ins定位系统的定位精度这一缺点。使得ppp-ins定位技术在自动驾驶、高速运动物体定位、测速、测姿领域能够实现更广、更深层面的应用。
[0099]
实施例2
[0100]
如图2所示,本实施例与实施例1的区别在于,本实施例提供了基于低轨导航增强的ppp-ins组合导航定位系统,该系统支持实施例1的基于低轨导航增强的ppp-ins组合导航定位方法;该系统包括:
[0101]
第一实时获取单元,用于实时获取低轨卫星数据和ins观测数据;
[0102]
定位观测方程确定单元,用于将低轨卫星数据和ins观测数据进行紧组合,确定定位观测方程;
[0103]
初步位置信息解算单元,用于采用随机模型对定位观测方程进行解算,得到终端的初步位置信息(即粗略位置信息);
[0104]
第二实时获取单元,用于实时获取低轨增强信息、gnss观测值和ins观测数据;
[0105]
紧组合观测方程确定单元,用于将低轨增强信息、gnss观测值和ins观测数据进行紧组合,确定紧组合观测方程;
[0106]
进一步位置信息解算单元,用于根据低轨增强信息和初步位置信息,确定gnss整周模糊度;并采用随机模型,对紧组合观测方程进行解算,并结合卡尔曼滤波器确定终端的进一步位置信息;
[0107]
修正单元,用于根据进一步位置信息,对初步位置信息进行反馈与纠偏,得到终端的完整可靠的最终位置信息。
[0108]
各个单元的执行过程按照实施例1所述的基于低轨导航增强的ppp-ins组合导航定位方法流程步骤执行即可,此实施例中不再一一赘述。
[0109]
同时,本发明又提供了一种计算机设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现所述的基于低轨导航增强的ppp-ins组合导航定位方法。
[0110]
同时,本发明又提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现所述的基于低轨导航增强的ppp-ins组合导航定位方法。
[0111]
本领域内的技术人员应明白,本技术的实施例可提供为方法、系统、或计算机程序产品。因此,本技术可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本技术可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产品的形式。
[0112]
本技术是参照根据本技术实施例的方法、设备(系统)、和计算机程序产品的流程
图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
[0113]
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
[0114]
这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
[0115]
以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
