用于预定组合激光超声乳化疗法的集成系统
1.本技术要求优先权并且根据35u.s.c.
§
119(e)(1)要求于2020年1月3日提交的美国临时申请序列号62/956,731的申请日的权益,其全部公开内容通过引用并入本文。
技术领域
2.本发明涉及用于治疗眼睛(包括动物、哺乳动物和人的眼睛)的结构的系统和方法。特别地,本发明的实施例涉及用于组合使用声能(包括超声波)和光能(包括激光)来解决眼睛病状的系统和方法。
背景技术:
3.自然人眼的解剖结构在图11中大体示出,该图是眼睛的截面图。巩膜131是围绕晶状体103(除了在角膜101处)的白色组织。角膜101是包括眼睛的外表面的透明组织,其中光首先通过该外表面进入眼睛。虹膜102是有色的、可收缩的膜,其通过改变其中心的圆孔(瞳孔)的大小来控制进入眼睛的光的量。眼晶状体或天然晶状体103(其更详细的图片在图11a中示出,对相似结构使用相似的附图标记)正好位于虹膜102的后面。术语眼晶状体、天然晶状体(crystalline lens/lens)、天然人晶状体和晶状体(当提及先前的术语时)在本文中可互换使用并且是指人眼的相同解剖结构。
4.通常,眼晶状体通过睫状肌108的作用改变形状以允许聚焦视觉图像。来自大脑的神经反馈机制允许睫状肌108通过悬韧带111的附接来改变眼晶状体的形状。通常,当光通过角膜101和瞳孔进入眼睛,然后沿着视轴104通过玻璃体110穿过眼晶状体103,到达眼睛后部的视网膜105,在黄斑106处形成由视神经107传送到大脑的图像时,就会出现视觉。角膜101与视网膜105之间的空间充满了前房109中称为房水117的液体和晶状体后房中的玻璃体110(凝胶状透明物质)。
5.图11a大体上示出了典型的50岁个体的晶状体103的部件和与晶状体相关的部件。晶状体103是多结构系统。晶状体103的结构包括皮质113、核129和晶状体囊114。囊114是包围晶状体的其他内部结构的外膜。晶状体上皮123在晶状体赤道121处形成,从而产生围绕眼晶状体前后生长的带状细胞或原光纤。核129由皮质113连续添加到核区域形成。晶状体中的连续层(包括核129)可以被表征为几个层、一个或多个核区域。这些层包括胚胎核122、胎儿核130(两者都在子宫内发育),婴儿核124(从出生到四岁发育,平均大约三年),青少年核126(从约4岁直至青春期,平均约12岁,成人核128(约18岁及以后发育)。
6.胚胎核122的赤道直径(宽度)为约0.5mm并且前后轴104(ap轴)的直径(厚度)为约0.425mm。胎儿核130的赤道直径为约6.0mm并且ap轴104的直径为约3.0mm。婴儿核124的赤道直径为约7.2mm并且ap轴104的直径为约3.6mm。青少年核126的赤道直径为约9.0mm并且ap轴104的直径为约4.5mm。大约36岁的成人核128的赤道直径为约9.6mm并且ap轴104的直径为约4.8mm。这些都是大约50岁的典型成人人晶状体在离体适应状态下的平均值。因此,该晶状体(核和皮层)的赤道直径为约9.8mm并且ap轴104的直径为约4.9mm。因此,晶状体的结构是分层或嵌套的,其中最老的层和最老的细胞朝向中心。
7.晶状体是如图11和图11a所示的双凸形状。晶状体的前侧和后侧具有不同的曲率并且皮质和不同的核通常遵循这些曲率。因此,可以将晶状体视为基本上沿赤道轴不对称的分层结构,并且由端对端排列成基本上同心或嵌套的壳的长新月形光纤细胞组成。这些细胞的末端对齐以在前部和后部两者的中心和近中心区域形成缝线(suture line)。皮质和细胞核两者中较老的组织细胞功能降低,在细胞形成几个月后失去其细胞核和他细胞器。
8.随着年龄的增长会发生晶状体的紧缩(compaction)。整个生命周期中每年生长的晶状体光纤的数量是相对恒定的。然而,晶状体的大小并不像预期的那样从新光纤生长变得那么大。晶状体从出生到3岁,从6mm生长到7.2mm或仅3年生长20%。然后下一个大约十年,从7.2mm生长到9mm或生长25%;然而,这是在9年的超过3倍的时间里。在接下来的大约20年中,从12岁到36岁,晶状体从9mm生长到9.6mm或在24年生长6.7%,表明观察到的生长速度显着放缓,而我们认为光纤生长速度在这段时期期间是相对稳定的。最后,在所描述的最后大约20年中,从36岁到54岁,晶状体的生长速度仅为其年轻生长的一小部分,在18年内从9.6到9.8mm或2.1%。尽管存在着需要更多晶状体光纤来填充更大外壳的几何效应,但老的晶状体的尺寸比考虑几何效应的光纤生长速率模型预测的要小得多。包括核光纤紧缩在内的光纤紧缩被认为可以解释这些观察结果。
9.总体而言,老花眼是调节幅度的损失。总体而言,屈光不正通常是由于眼睛轴向长度的变化。近视是指眼睛过长导致焦点落在视网膜前面。远视是指眼睛太短导致焦点落在视网膜后面。通常,白内障是足以干扰视力的晶状体混浊区域。
10.老花眼最常表现为近视缺陷,即无法阅读小字,尤其是在40-45岁后昏暗的灯光下。老花眼或随着年龄的增长调节幅度的丧失与眼睛无法改变天然晶状体的形状有关,这使得人在远近之间改变焦点,并且基本上100%的人都会发生这种情况。调节幅度已显示在生命的第五个十年随着年龄的增长而稳步下降。
11.如本文所用,除非另有说明,否则本文中数值范围的叙述仅旨在用作单独提及落入该范围内的每个单独值的速记方法。除非在本文中另有说明,否则在一个范围内的每个单独的值都结合在本说明书中,如同它在本文中被单独引用一样。
12.总体而言,除非另有说明,否则本文所用的术语“约”意在涵盖
±
10%的方差或范围(与获得所述值相关的实验或仪器误差),并且优选地是这些中的较大者。
13.如本文所用,除非另有特别说明,否则术语“超声乳化(phacoemulsification/phaco)”、“超声乳化系统”将被赋予其最广泛可能的解释,指的是相同的通用设备和手术并且通常涉及使用超声能量驱动针头或尖端,从而例如切割、破碎、分离并乳化组织,包括眼睛组织,例如晶状体和白内障。这样的手术和系统还可以包括用于抽吸、冲洗和两者的组件和方法。
14.如本文所用,除非另有明确说明,否则术语“飞秒激光”、“飞秒激光束”、“飞秒脉冲”和类似的此类术语用于指脉冲持续时间,并且因此也指激光束的脉冲长度(也可以称为脉冲宽度),并且意指脉冲持续时间小于1皮秒(小于1x10-12
秒)到并包括1飞秒(fs)(1x10-15
秒)的所有激光和激光束。
15.如本文所用,除非另有明确说明,否则术语“皮秒激光”、“皮秒激光束”、“皮秒脉冲”和类似的此类术语用于指脉冲持续时间,并且因此也指激光束的脉冲长度(也可称为脉
冲宽度),并且意指脉冲持续时间为1皮秒(ps)(1x10-12
秒)至1纳秒(ns)(1x10-9
秒)的所有激光和激光束。
16.如本文所用,除非另有明确说明,否则术语“远端”和“近端”具有以下含义。对于激光、激光束和激光部件,远端是指距离激光束源较近的一侧、部位或位置。对于超声乳化系统,远端是指更靠近超声能量源的一侧、部位或位置。对于激光、激光束和激光部件,术语近端是指沿激光束路径远离激光束源的一侧、部位或位置;并且因此,在操作中更靠近患者。对于超声乳化系统,术语近端意指沿着能量传递路径远离超声能量源的一侧、部位或位置;并且因此,在操作中更靠近患者。相反,激光部件或超声乳化部件的远端在那些系统的操作期间离患者更远。
17.超声能量除了作为一种诊断工具外,还具有治疗用途。可以将超声能量聚焦、引导、用于移动(例如,振荡或振动)切割设备、工具或尖端以切割、软化或乳化组织,从而产生雾和蒸汽,以及这些的组合和变体。总体而言,超声乳化是一种医学公认的使用超声能量去除晶状体技术。通常,超声乳化术包括制作角膜切口、巩膜切口以及这些中的一个或多个以及两者。通过这些切口之一插入超声乳化机头,该机头通常由超声驱动的针构成,以便例如乳化(即液化)天然晶状体,将白内障破碎成小块,以及这些的组合和变体。随后可以使用相同的机头或另一机头去除乳化碎片。然后外科医生可以通过切口将植入物插入眼睛。
18.通常,用于眼睛的激光治疗手术包括将患者定位在床上或患者支架上,将眼睛与激光系统的激光束路径对齐,以及在激光系统与眼睛之间附接患者接口。然后以激光束模式(模式)传输治疗激光束,以在眼睛上执行治疗激光操作,并且特别是对眼睛的结构或与眼睛相关的结构执行治疗激光操作,从而解决眼睛的病状。因此,例如,用于解决白内障、老花眼、屈光不正(自然的和诱发的)和其他眼睛病状的激光手术是本领域已知的。
19.迄今为止,在手术室和医疗室中,典型的医用超声设备和系统,并且特别是超声乳化系统,是独立的系统,具有它们自己的电源、控制系统、监控器、控制和指令输入、外壳、机柜和底座。同样,迄今为止,在手术室和医疗室中,典型的医疗激光治疗设备和系统是独立系统,具有它们自己的电源、控制系统、监控器、控制和指令输入、外壳、机柜和底座。
20.尽管本领域已经表达了将超声设备与其他治疗设备(例如激光器)组合的需要,并提供了一些基本的组合,但相信这种需要在很大程度上没有得到满足。迄今为止,据信没有人成功地将治疗超声系统与另一系统(例如治疗激光传输系统)集成以提供满足法规和医疗从业者的要求和需要的紧凑、有效的医疗系统。特别地,在本发明之前,据信没有人成功地将眼科超声乳化系统与眼科治疗激光系统集成以提供满足法规和医疗从业者的要求和需要的紧凑、有效、符合人体工程学的医疗系统。满足这两个要求和需要不仅仅涉及已由本领域所建议的两个系统的简单组合。这些需要通过本发明得到满足,本发明的实施例提供了集成的超声-激光,并且特别是超声乳化-激光(phacoemulsification-laser/phaco-laser)系统,其是同时满足法规和医疗从业者的要求和需要的紧凑、有效、符合人体工程学的医疗系统。
21.本发明背景部分旨在介绍本领域的各个方面,这些方面可能与本发明的实施例相关联。因此,本节中的前述讨论为更好地理解本发明提供了框架,并且不应被视为对现有技术的承认。
技术实现要素:
22.长期以来一直存在并未得到满足的解决并改善手术室和医疗室系统的大小、手术室的人体工程学、手术系统和设备、有效执行程序所要求的时间以及患者的舒适度等的需求。这些长期存在的需求已经存在并继续存在于除其他之外眼科领域,包括解决白内障、解决基于屈光的问题、解决老花眼、解决眼睛的疾病、病状和损伤,以及存在于其他手术中,以及眼睛和附近结构的病状的其他手术。本发明尤其通过提供在本说明书、附图和权利要求书中提出的制造品、设备和方法来解决这些和其他需求。
23.因此,提供了一种激光超声系统,包括:治疗激光系统;用于提供治疗超声能量的超声乳化系统;以及,用于确定眼睛结构的形状、位置或两者的装置。
24.此外,提供了具有以下一个或多个特征的这些系统、方法和设备:其中激光器选自由飞秒激光器和皮秒激光器组成的组;其中用于确定眼睛结构的形状、位置或两者的装置是沙姆相机装置;其中用于确定眼睛结构的形状、位置或两者的装置是沙姆相机装置;其中治疗激光系统具有支撑可移动臂的组件,可移动臂包含激光束路径和激光头;由此组件被配置成相对于患者位置以一定角度定位,其中角度由臂的经度轴线和患者轴线界定;并且其中角度包括在约45
°
至约270
°
范围内的所有角度;其中治疗激光系统具有支撑可移动臂的组件,可移动臂包含激光束路径和激光头;由此组件被配置成相对于患者位置以一定角度定位,其中角度由所述臂的经度轴线和患者轴线界定;并且其中角度包括在约45
°
至约270
°
范围内的所有角度;包括pid,并且其中pid具有弯月面转换部件(meniscus inverter);其中系统被配置成提供具有不同脉冲持续时间的两个治疗激光束;其中沙姆相机装置具有n个相机,其中至少n-1个相机具有在30度至320度的任何患者角度内对于患者眼睛的无遮挡视野;其中沙姆相机装置具有n个相机,其中n为5;其中沙姆相机装置具有n个相机,其中n为6;其中沙姆相机装置具有n个相机,其中相机具有至少40度的分离;其中用于确定眼睛结构的形状、位置或两者的装置具有光学相干断层扫描系统;并且其中用于确定眼睛结构的形状、位置或两者的装置还具有光学相干断层扫描系统。
25.此外,提供了一种激光超声系统,包括:治疗激光系统;用于提供治疗超声能量的超声乳化系统;控制系统;以及,用于确定眼睛结构的形状、位置或两者的装置;其中用于确定的装置被配置成向控制系统提供用于分级白内障的信息;其中治疗激光系统、超声乳化系统和控制系统的至少一部分共用共同外壳;控制系统,其与治疗激光系统、超声乳化系统和用于确定的装置控制通信;控制系统被配置成至少部分地基于由确定装置提供的信息来确定白内障的分级;由此,控制系统被配置成部分地基于所确定的白内障分级来确定组合的治疗激光手术和超声乳化手术。
26.此外,提供了具有以下一个或多个特征的这些系统、方法和设备:其中用于确定眼睛结构的形状、位置或两者的装置具有沙姆成像系统;其中用于确定眼睛结构的形状、位置或两者的装置具有光学相干断层扫描系统;其中用于确定眼睛结构的形状、位置或两者的装置具有沙姆相机装置;其中沙姆相机装置具有n个相机,其中至少n-1个相机具有在30度至320度的任何患者角度内对于患者眼睛的无遮挡视野;其中沙姆相机装置具有n个相机,其中至少n-1个相机具有在约45度至约270度的任何患者角度内对于患者眼睛的无遮挡视野;其中沙姆相机装置具有n个相机,其中n为5或6;其中沙姆相机装置具有n个相机,其中n为5或6;其中沙姆相机装置具有n个相机,其中相机具有至少40度的分离;其中治疗激光系
统具有支撑可移动臂的组件,可移动臂包含激光束路径和激光头;由此组件被配置成相对于患者位置以一定角度定位,其中角度由臂的经度轴线和患者轴线界定;并且其中角度为30度至320度;并且其中系统被配置成提供具有不同脉冲持续时间的两个治疗激光束。
27.更进一步,提供了一种激光超声系统,包括:治疗激光系统;该治疗激光系统包括:具有近端的臂;连接到所述臂的近端的激光头;以及用于操作所述治疗激光系统的电子设备;用于提供治疗超声能量的超声乳化系统,包括用于操作超声乳化系统的电子设备;并且,其中激光头与用于超声乳化系统的电子设备、用于治疗激光系统的电子设备或这两者电隔离。
28.此外,提供了一种激光系统,包括:用于提供治疗激光束的治疗激光器;以及,用于界定激光束路径的光学器件组件;其中激光束路径长于300mm;由此治疗激光束模式可以沿着激光束路径传输,而没有激光束模式扩大。
29.此外,提供了具有以下一个或多个特征的这些系统、方法和设备:其中治疗激光器选自由皮秒激光器和飞秒激光器组成的组;其中治疗激光器选自由皮秒激光器和飞秒激光器组成的组并且还包括集成超声乳化系统。
30.此外,提供了一种激光系统,包括:用于提供治疗激光束的治疗激光器;以及,用于界定激光束路径的光学器件组件;其中激光束路径长于300mm;由此治疗激光束模式可以沿着激光束路径传输,而没有波前误差。
31.此外,提供了一种激光系统,包括:用于提供治疗激光束的治疗激光器;以及,用于界定激光束路径的光学器件组件;其中所述激光束路径长于300mm;由此治疗激光束模式可以沿着激光束路径传输,而没有析光差。
32.此外,提供了具有以下一个或多个特征的这些系统、方法和设备:具有用于确定眼睛结构的形状、位置或两者的装置;其中该装置选自由沙姆成像系统和光学相干断层扫描系统组成的组;具有虹膜登记系统(iris registration system);其中系统具有手术显微镜;并且手术显微镜与系统集成并被配置成接收来自激光系统的图像、数据、信息中的一个或多个;其中手术显微镜被配置成显示在激光手术、超声乳化生产器或两者期间接收到的图像、数据或信息;其中系统具有3d观察系统;并且3d观察系统与系统集成并被配置成接收来自激光系统的图像、数据、信息中的一个或多个;其中3d观察系统被配置成显示在激光手术、超声乳化生产器或两者期间接收到的图像、数据或信息;其中系统具有手术显微镜;并且手术显微镜与系统集成并被配置成接收来自激光系统的图像、数据、信息中的一个或多个;其中手术显微镜被配置成显示在激光手术、超声乳化生产器或两者期间接收到的图像、数据或信息;以及虹膜登记系统;并且其中系统具有3d观察系统;并且3d观察系统与系统集成并被配置成接收来自激光系统的图像、数据、信息中的一个或多个;其中3d观察系统被配置成显示在激光手术、超声乳化生产器或两者期间接收到的图像、数据或信息;以及虹膜登记系统。
33.此外,提供了具有以下一个或多个特征的这些系统、方法和设备:其中激光器是飞秒激光器;其中激光器是皮秒激光器;其中系统具有用于分级白内障的装置;其中系统是非手性的(non-handed);其中系统具有超声乳化托盘、超声乳化盒并且是非手性的;并且其中系统具有无线脚踏开关,其被配置成控制激光、超声乳化或这两者;其中系统具有界定开口的激光头,其中治疗激光束路径穿过开口,并且与开口相关联的是用于在超声乳化系统的
操作期间当激光头处于缩回位置时关闭开口的装置,或两者。
34.还另外,提供了使用这些系统中的任何一个来维修、升级软件、操作或执行手术的方法。
35.又另外,提供了一种使用集成激光-超声乳化系统的方法,该方法包括以下步骤:评估关于患者白内障眼睛内晶状体中白内障的信息;并且基于关于白内障的信息的评估至少部分地确定推荐的激光-超声乳化组合疗法;其中推荐的激光-超声乳化组合疗法具有预定激光传输模式和预定超声乳化手术。
36.另外,提供了一种使用集成激光-超声乳化系统的方法,该方法包括以下步骤:评估关于患者白内障眼睛内晶状体中白内障的信息;并且基于关于白内障的信息的评估至少部分地确定推荐的激光-超声乳化组合疗法;其中推荐的激光-超声乳化组合疗法具有预定激光传输模式和预定超声乳化手术;并且,在gui上显示与推荐的激光-超声乳化组合疗法相关的菜单项。
37.此外,提供了一种使用集成激光-超声乳化系统的方法,该方法包括以下步骤:评估关于患者白内障眼睛内晶状体中白内障的信息;并且基于关于白内障的信息的评估至少部分地确定推荐的激光-超声乳化组合疗法;其中推荐的激光-超声乳化组合疗法具有预定激光传输模式和预定超声乳化手术;并且,在gui上显示与推荐的激光-超声乳化组合疗法相关的菜单项;并且选择推荐的激光-超声乳化组合疗法。
38.又另外,提供了一种使用集成激光-超声乳化系统的方法,该方法包括以下步骤:评估关于患者白内障眼睛内晶状体中白内障的信息;并且基于关于白内障的信息的评估至少部分地确定推荐的激光-超声乳化组合疗法;其中推荐的激光-超声乳化组合疗法具有预定激光传输模式和预定超声乳化手术;并且,在gui上显示与推荐的激光-超声乳化组合疗法相关的菜单项;并且选择推荐的激光-超声乳化组合疗法;并且选择预定的激光传输模式或预定的超声乳化手术之一;并且基于选择,系统确定新的推荐激光-超声乳化组合疗法。
39.另外,提供了一种使用集成激光-超声乳化系统的方法,该方法包括以下步骤:评估关于患者白内障眼睛内晶状体中白内障的信息;并且基于关于白内障的信息的评估至少部分地确定推荐的激光-超声乳化组合疗法;其中推荐的激光-超声乳化组合疗法具有预定激光传输模式和预定超声乳化手术;并且,在gui上显示与推荐的激光-超声乳化组合疗法相关的菜单项;并且选择推荐的激光-超声乳化组合疗法;并且选择预定的激光传输模式或预定的超声乳化手术之一;并且基于选择,系统确定新的推荐激光-超声乳化组合疗法,选择新的推荐激光-超声乳化组合疗法。
40.此外,提供了具有以下一个或多个特征的这些系统、方法和设备:在gui上显示与推荐的激光-超声乳化组合疗法相关的菜单项;选择推荐的激光-超声乳化组合疗法;选择预定的激光传输模式或预定的超声乳化手术之一;并且基于选择,系统确定新的推荐激光-超声乳化组合疗法;并且选择新的推荐激光-超声乳化组合疗法。
附图说明
41.图1是根据本发明的激光超声系统的实施例的透视图。
42.图2是根据本发明的飞秒激光超声乳化系统的实施例的透视图。
43.图3是根据本发明的飞秒激光超声乳化系统的实施例的透视图。
44.如图4是根据本发明的用于飞秒激光系统的光学系统和光学路径的实施例以及飞秒激光超声乳化系统的实施例的示意图。
45.图4a是图4的实施例的治疗和扫描激光光学系统和光学路径的实施例的示意图。
46.图4b是图4的实施例的沙姆(scheimpflug)光学系统和光学路径的实施例的示意图。
47.图4c是ir相机的实施例的示意图,其中沿着治疗激光(顺管而下)光学系统的光学路径和图4的实施例的光学路径进行观察。
48.图4d是彩色相机的实施例的示意图,其中沿着治疗激光(顺管而下)光学系统的光学路径和图4的实施例的光学路径进行观察。
49.图4e是根据本发明的光学系统和路径的实施例的示意图。
50.图4f是根据本发明的光学系统和路径的实施例的示意图。
51.图4g是根据本发明的光学系统和路径的实施例的示意图。
52.图5是根据本发明的系统的实施例的透视图。
53.图5a是根据本发明的系统的实施例的一部分的俯视图。
54.图5b是根据本发明的定位组件的实施例的透视图。
55.图5c是根据本发明的定位组件的实施例的透视图。
56.图5d至图5h是根据本发明的本发明系统的实施例的位置的侧视图。
57.图5i是根据本发明的铰接式光管的实施例的透视图。
58.图6是根据本发明的系统配置的实施例的俯视图。
59.图7是根据本发明的系统配置的实施例的俯视图。
60.图8是根据本发明的沙姆组件的实施例的俯视图。
61.图9是根据本发明的沙姆组件的实施例的俯视图。
62.图10a和图10b是根据本发明的近端组件和对接系统的实施例的透视图。
63.图11是人眼的截面图。
64.图11a是图11的眼睛晶状体的截面图。
65.图12a是根据本发明的患者接口设备(pid)的实施例的透视图。
66.图12b是图12a的pid的放大透视图。
67.图12c是图12a的pid的顶部透视图。
68.图12d是图12a的pid的截面图。
69.图12e是图12a的pid的透视图。
70.图12f是图12a的pid的截面图。
71.图12g是将图12a的pid附接到根据本发明的激光超声系统的实施例的方式的透视图。
72.图12h是附接到根据本发明的激光超声系统的实施例的图12a的pid的透视图。
73.图12i是用于将pid附接到根据本发明的激光超声系统的实施例的锁定机构的实施例的透视图。
74.图12j是从不同的侧面观察图12i的锁定机构的透视图。
75.图13是根据本发明的pid的实施例的透视图。
76.图14是根据本发明的飞秒激光超声乳化系统的实施例的透视图。
77.图14a是根据本发明的具有手术显微镜的飞秒激光超声乳化系统的实施例的透视图。
78.图15是图14的飞秒激光超声乳化系统的一部分的透明透视图。
79.图15a是图14的飞秒激光超声乳化系统的水平和竖直运动机构的透视图。
80.图15b是根据本发明处于伸出位置的图15a的机构的透视图。
81.图16a是根据本发明在手术室中并处于完全缩回位置的图14的系统的平面图。
82.图16b是根据本发明在手术室中并处于部分伸出的激光操作配置(第一位置)的图14的系统的平面图。
83.图16c是根据本发明在手术室中并处于完全伸出的激光操作配置的图14的系统的平面图。
84.图17a-图17c是一系列照片,示出了图14的系统的可伸出组件在其伸出和缩回时的具体位置。图17a示出了用于激光系统的测试和校准的中性伸出位置。图17b示出了用于治疗激光操作的第一操作伸出位置。图17c示出了用于治疗激光操作的第二操作伸出位置(完全伸出)。
85.图18是根据本发明的固定(fixation)光学路径的实施例的示意图。
86.图19是根据本发明的彩色顺管而下(dtp)光学路径的实施例的示意图。
87.图20是根据本发明的pid的实施例的截面透视图。
88.图20a是图20的pid的放大透视图。
89.图20b是图20的pid的透视图。
90.图21是根据本发明的处于伸出位置的飞秒激光超声乳化系统的实施例的透视图。
91.图21a是图21的系统的透视图,以缩回位置并且从另一侧示出了该系统。
92.图21b是图21的系统的托盘组件的平面图。
93.图21c是图21的系统的一部分的透视图。
94.图21d是图21的系统的锁定接合设备处于打开位置的透视图。
95.图21e是图21的系统的锁定接合设备处于闭合位置的透视图。
96.图22是根据本发明的具有无线脚踏开关的飞秒激光超声乳化系统处于伸出位置的实施例的透视图。
97.图22a是根据本发明用于图22的飞秒激光超声乳化系统的控制总线的示意图。
98.图23a-图23d是根据本发明的gui屏幕显器、信息和菜单的实施例的图像。
具体实施方式
99.总体而言,本发明的实施例提供了用于解决眼睛(包括角膜、天然晶状体和眼睛的其他结构和与眼睛相关联的结构)的病状的系统和方法,并且特别是用于将激光能量、超声能量和这两者传输到眼睛以解决、减轻、改善和扭转这些病状的系统和方法。
100.总体而言,本发明的实施例涉及人体工程学系统、集成系统以及它们的组合和变体,其尤其是提供使用超声和激光束来诊断、治疗人眼及其相关结构的病状的能力以及这些的组合和变体。在本发明系统的实施例中,激光部件和超声部件被集成到单个设备中,该设备被配置成操作治疗超声能量和激光能量、控制治疗超声能量和激光能量并将其传输到眼睛。这些集成设备可以具有的实施例:集成和交互式控制系统;集成患者信息系统;集成
计费系统;集成电子病历;激光与超声系统之间的集成和交互式操作、控制、传输、语音命令、语音识别和语音控制菜单以及这些系统的组合;激光与超声系统之间的集成和交互协议,包括安全系统;用于外科医生和从业者将信息和指令输入设备的集成和交互式输入系统;集成和交互式监控系统、显示器和这两者;集成和公用电源和电源管理;集成热负荷,(例如,热)管理;无干扰的能源生产和传输系统;以及这些特征和其他特征的组合和变体。
101.在一个实施例中,这些集成设备或系统与患者支撑床相关联并形成另一个系统。在优选实施例中,这些设备和患者支撑床被配置成允许外科医生通过多个途径接近(access)患者的左眼和右眼,而无需患者移动或重新定位。因此,该系统的优选实施例允许外科医生根据外科医生接近一只或两只眼睛的个人优选方法轻松定位患者,而无需重新定位患者并且无需重新配置激光、超声和这两者。以这种方式,增强了患者适应度,增强了外科医生的人体工程学,增强了效率,增强了功效,减少了完成对患者的整个程序(例如,双眼)的时间,并且可以获得这些的组合和变体以及其他益处。
102.在实施例中,这些集成设备或系统与配置成从系统的任一侧进行定向和操作的超声乳化托盘或超声乳化盒相关联。以这种方式,外科医生可以从系统提供的任何可能的外科医生-患者方位触及和使用盒的部件。
103.在实施例中,这些集成设备或系统为外科医生提供了在激光和超声操作之间切换的能力,而无需更多患者,外科医生不必改变相对于系统的位置,并且优选地无需这两者。
104.在实施例中,将患者定位在患者支撑物(例如支撑床)上。然后将系统移动到患者附近的位置。该系统可以由外科医生在本说明书中描述的多个方向中的任何一个上定位。然后使用激光系统和超声系统对患者进行手术。
105.本发明系统的实施例可以包括前述实施例和段落以及以下段落中的实施例的一个或多个以及所有特征。
106.这些系统(例如集成超声乳化激光系统)的实施例被配置成并能够解决眼睛的各种病状,并在眼睛上执行各种程序,包括例如:囊切开术;定制形状的非圆形和非椭圆形囊切开术;晶状体切割、破碎、切片和去除;白内障切割、破碎、分离和去除;晶状体和白内障组织的乳化;角膜切割和切口;制作角膜瓣和角膜微囊袋;制做角膜缘松弛切口;解决和矫正屈光不正(自然和诱发);去除残留的皮质材料;去除晶状体上皮细胞;与前部玻璃体切除术相关的玻璃体抽吸和切割;解决双极凝血问题;和人工晶状体注入。
107.这些系统(例如集成超声乳化激光系统)的实施例被配置成并能够解决眼睛的各种病状,并执行各种手术,包括角膜移植术、放射状角膜切开术(rk)、散光角膜切开术(ak)和角膜缘松弛切口(lri),以及这些的组合和变体。这些切口可以在超声乳化手术和晶状体植入之前或之后通过激光进行。rk包括微型rk、微型rk/ak和传统rk,而微型rk是优选的。对于微型rk,径向切口可用于优选大于约5.00mm和更大的光学区域,但也可以考虑更小的区域。切口的长度通常为约2.50mm。切口的典型参数如表1所示。通常,在微型rk手术中会在角膜上做1、2、3个或更多个切口。表1径向切口参数范围优选值默认值单位光学区4.00-6.255.005.00mm到ak的最小间隙0.00-0.500.200.20mm
所希望的径向长度0.50-2.502.002.00mm最小残留间质100-300150150μm深度20-908080%入口过切( )-0.20- 0.200.060.06mm
108.在这些系统的实施例中,相关联的患者支撑床是智能患者支撑床。该智能患者支撑床具有位置确定设备(例如,定位设备、rfid、光学元件、加速度计、传感器、定位设备等),其与激光超声设备通信以提供患者(并且尤其是患者的头部)相对于激光束输送部件、激光束路径、激光对接部件、超声部件、组合的激光-超声设备以及这些的组合和变体的准确位置。
109.在这些系统的实施例中,存在相关联的智能头枕,其可以与任何标准的患者支持物相关联;例如,患者支撑床。该智能头枕具有位置确定设备(例如,定位设备、rfid、光学元件、加速度计、传感器、定位设备等),其与激光超声设备通信以提供患者(并且尤其是患者的头部)相对于激光束输送部件、激光束路径、激光对接部件、超声部件、组合的激光-超声设备以及这些的组合和变体的准确位置。
110.在这些系统的实施例中,存在相关联的患者智能设备,例如患者标签、带或帽,其可以与患者的头部或颈部相关联,例如由患者佩戴或置于患者身上。该患者智能设备具有位置确定设备(例如,定位设备、rfid、光学元件、加速度计、传感器、定位设备等),其与激光超声设备通信以提供患者(并且尤其是患者的头部)相对于激光束输送部件、激光束路径、激光对接部件、超声部件、组合的激光-超声设备以及这些的组合和变体的准确位置。
111.在实施例中,患者智能设备还可以具有网络能力、存储能力、识别能力以及它们的组合和变体。例如,患者智能设备可用于确认患者身份,或结合其他生物识别系统(如视网膜图像或虹膜扫描)来确认身份。而且,并且通过这种方式,患者智能设备可以与激光系统、医疗计费信息、电子患者病历以及外科医生、保险、患者、其他以及的组合和变体需要或要求的健康和信息管理系统进行通信。
112.这种用于患者的位置确定设备,也称为用于患者的定向/位置跟踪系统,确定患者(例如患者的头部)相对于激光和激光束路径的位置的,并且该位置确定设备例如,可以是电磁跟踪系统,例如polhemus patriot
tm
6-dof。这种跟踪系统的实施例在美国专利号5,307,072、6,369,594、6,400,139、6,624,626、7,710,395、6,762,600、7,292,948、7,873,491和8,013,595中公开和教导,每个专利的全部公开内容通过引用并入本文。这样的设备也可以称为患者定位器或患者定位设备或系统。
113.在实施例中,激光超声系统,并且特别是激光超声乳化系统被配置成使得治疗激光束可以治疗激光束模式传输到患者的一只或两只眼睛,并且可以在患者的一只或两只眼睛上执行超声乳化手术,而无需患者或外科医生必须从他们相对于激光超声乳化系统的相对位置移动。
114.在实施例中,与如果是并排放置或仅放置在共同外壳或舱室(cabinmate)中的两个设备的尺寸相比,本发明设备(例如集成的超声乳化激光设备)的实施例的尺寸大大减小,从而与单独的激光系统和超声系统所需的总空间相比,在手术室中提供更小的占地面积(foot print)。这在本领域中提供了显着的进步,因为在本发明之前,聚信完全集成的激光超声系统尚未在手术室中使用或获得法规批准。该实施例的减小尺寸提供了对现有技术
的若干改进,包括效率、功效和这两者。更换两个系统的能力,无需在患者治疗期间移动患者、系统或两者,无需将患者从一个手术室转移到另一个手术室(在这种情况下,激光系统和超声系统是在不同的房间)是这种较小尺寸的设备实施例的一些益处。这种较小尺寸设备的实施例还提供了在更多例如更小的手术室中使用的能力,同时使在手术室工作的外科医生和其他专业人员更容易移动。它还可以在操作清理以及释放空间以提供在手术室中安装其他系统(例如诊断设备和显微镜)的能力方面提供优势。与将超声和激光系统集成到具有这种小占地面积和小总体积(高度、宽度、长度)的单个设备中,而不会在设备之间产生干扰,保持每个设备按预期操作的能力以及维持每个设备所要求的功效相关联的问题以及对那些问题的解决方案,据信在本发明的实施例之前未被识别、着手解决或解决。
115.在这些系统的实施例中,从一种操作模式改变或切换到另一种操作模式的时间优选地发生得很快。因此,该设备可以在约45sec至约10sec、约30sec至约5sec、在不到1min、不到30sec、不到15sec、不到10sec、不到5sec和不到2sec内从激光方式改变到超声乳化方式。应当理解,在设备模式已经改变之后,在可以进行特定手术之前可能需要额外的患者准备时间。
116.在无需患者、系统、外科医生以及优选地所有这些必须相对于彼此重新定位的情况下在激光和超声乳化手术或操作之间进行改变的能力提供了额外的益处和优势。例如,这种快速且不显眼地在飞秒激光和超声乳化配置或操作之间进行改变的能力允许患者在进入手术室之前为这两种手术做好充分准备。此外,患者甚至可以在进入手术室之前用布帘盖上。
117.在这些激光超声系统的实施例中,例如集成的超声乳化激光设备,该设备(不包括患者床)的占地面积是小于约50立方英尺(ft3)、小于约40立方英尺(ft3)、小于约35ft3、小于约30ft3、小于约25ft3、小于约200ft3、约31ft3、约28ft3至约33ft3以及这些的组合和变体,以及更大和更小的值。在实施例中,设备的体积可以是可调节的,在这种情况下,设备的体积将是最小的体积,除非另有明确说明。该设备的高度可以是约45英寸(in)至约75in、约65in、约60in、约50in、约55in、小于60in、小于58in、约52in至约58in,以及这些的组合和变体,以及更大和更小的尺寸。(在臂、伸出部或部件可以移动到竖直位置或大约竖直位置以用于存储或其他目的的实施例中,当该部件处于可操作配置或位置(例如,通常是水平的或大约水平)时,应测量高度)。在实施例中,设备的高度可以是可调节的,在这种情况下,设备的高度将是最短的高度,除非另有明确说明。该设备的长度可以是约30in至约50in、约33in、约38in、约40in、小于约45in、小于40in、约34in至约38in、约36in,以及这些的组合和变体,以及更大和更小的尺寸。在实施例中,设备的长度可以是可调节的,例如通过可移动臂组件、托盘或托架,在这种情况下,设备的长度将是最短的长度,除非另有明确说明。该设备的宽度可以是约15in至约40in、约20in、约25in、约30in、小于约45in、小于约30in、约22in至约27in、约20in至约30in,以及这些的组合和变体,以及更大和更小的尺寸。在实施例中,设备的宽度或长度可以是可调节的,例如通过可移动臂、组件、托盘或托架,在这种情况下,设备的宽度将是最短的宽度,除非另有明确说明。这些设备的实施例的设备占地面积(即由该设备占据的占地面积)可以是约400in2到约1,300in2、约400in2到约600in2、约400in2至约500in2、约450in2至约700in2、约450in2、约500in2、约550in2、约600in2、小于约1,200in2、小于约1,100in2、小于约1,000in2、约1,000in2、约950in2、约900in2、约800in2、约
850in2至约950in2以及这些的组合和变体,以及更大和更小的尺寸。在实施例中,设备的宽度、长度和这两者都可以是可调节的,例如通过可移动臂、组件、托盘或托架,在这种情况下,设备的占地面积将是最小的面积,除非明确说明另有说明。设备的长度和宽度可以相同,例如,占地面积为正方形或圆形的形状,或者它们可以不同,例如,占地面积为矩形或椭圆形的形状。应当理解,可以设想其他形状的占地面积区域,例如星形、“l”形、“h”形等。
118.通常,超声乳化设备的占地面积是约20in x约25in,并且因此具有约500in2的占地面积。(即,“标准超声乳化占地面积区域”)。因此,超声乳化激光集成系统的实施例的占地面积区域相比500in 2
的典型超声乳化占地面积区域可以是约70%和更小、约80%和更小、约90%和更小、约100%和更小、约110%和更小、约120%和更小、约130%和更小、约140%和更小、约150%和更小。通过本发明的实施例(即在仅比一个设备稍大的区域中具有两个设备和因此两种治疗功能)实现的这种协同作用,在手术室和医疗室中为工作流程,用于患者护理的可用房间(例如,现在可以使用较小的房间)、患者和工作人员的舒适度和效率等提供了显著的益处和优势。
119.此外,即使在超声乳化系统小于典型占地面积的情况下,本发明的组合激光超声系统也可以被配置成比单独的激光器和这样的占地面积更小的超声系统占用更少的空间。
120.在这些系统的实施例中,通过使用定制托盘以及保持和定位用于激光治疗手术、激光诊断手术、超声乳化手术、晶状体植入以及任何屈光手术的各种手术工具、器械、套件(kit)和装备的设备来实现进一步的协同作用。这些定制的手术托盘和套件可以是一次性使用的一次性用品,其可拆卸地固定到设备外壳(或由设备外壳保持或保持在设备外壳中),它们可以是容纳一次性或可重复使用的工具和器械的整体托盘,以及这些的组合和变体。
121.在这些系统的实施例中,优化激光手术以提供最有效的,例如最低的超声能量以去除特定的晶状体材料。因此,考虑到本发明系统和设备的集成控制、监控和存储能力,可以以高度集成和预定的方式优化并以高度集成和预定方式完成诸如飞秒激光能量、激光发射间距、线间距等的激光参数和诸如超声乳化能量、bss(平衡盐溶液)流量、流体学等超声参数。
122.在具有双激光脉冲宽度的这些系统的实施例中,进一步的优点和益处将包括减少对诸如金刚石刀片和刀具之类的设备的需要和使用的能力。因此,降低了成本、感染风险和手术时间。
123.应该理解的是本说明书设想了本发明系统的实施例可以包括上述实施例和段落以及以下段落的实施例的一个或多个以及所有特征(以本领域的技术人员鉴于本说明书的教导和公开的内容所理解的各种组合)。
124.转到图1,其中示出了激光超声系统100的实施例的透视图。系统100是具有第一外壳101和第二外壳102的设备。外壳101和102包括电源部件、控制部件、操作部件、分析预测和诊断设备、位置限制和定位装备、激光束产生部件和超声产生部件。在优选的实施例中,超声产生部件是超声乳化系统的部件并且激光束产生部件提供具有约10ps、5ps、2ps和更短脉冲长度的激光束。
125.这些组件可以全部和部分地分布在两个外壳101、102之间,除了其他原因之外:以优化空间,从而避免组件之间的干扰,管理热量和振动,并提供系统100的更有效的控制和
操作。两个外壳101、102可以是独立的外壳,在同一个底座或框架150上,它们之间可以具有通信、控制、电源、光学连接以及其他连接,它们可以是单独的同一外壳,它们可以细分或划分成第三外壳或子外壳或第四外壳或子外壳等,以及它们的组合和变体。
126.存在将外壳102与外壳106连接的光学导管105。外壳106包括扫描设备和用于治疗激光束的光束整形光学器件,该扫描设备、光学器件和两者也可用于监控和诊断激光束和光学路径。应当理解,在实施例中,外壳106的这些组件可以全部或部分位于其他外壳102、101之一中,并且同样地,来自外壳102、101的组件可以位于外壳106中。外壳106可以与外壳102、101集成或者是其一部分。外壳106可以被细分或划分成一个或多个外壳或子外壳,以及它们的组合和变体。在本发明优选的实施例中,外壳106包括并隔离扫描仪和光束整形光学器件。可以包括在外壳106中的扫描仪和光束整形光学器件或其他部件与系统100的控制器和操作系统控制通信。控制通信意指关于设备操作的信息被传递到设备和从设备传递,由设备获得或接收的信息被传递到设备和从设备传递,并且控制信息、指令或命令被传递到设备,以及这些的组合和变体,以及其他数据和信息。设备可以彼此直接控制通信,或者它们可以彼此间接控制通信,例如通过与中央控制,例如系统100控制器、监控器109(其也可具有控制能力)通信,以及这些的组合和变体。这些设备也可以直接和间接地相互控制通信。
127.光学导管105可以是光管(例如,具有内反射表面的空心管或通道,使得激光束通过空心管内的自由空间传输,空心管内的自由空间可以具有部分真空,具有环境空气,包含惰性气体,以及这些的组合和变体)、铰接式光管、伸缩式光管、柔性光管、光纤、一根或多根光纤、空心导管、光束导向器以及这些和其他激光束传输结构的组合和变体。
128.外壳106具有臂107,其可以沿箭头107a和107b的方向移动、伸出、收缩以及这些的组合和变体。臂107和外壳106通过升降设备110沿竖直方向移动,如箭头107a所示。臂107具有用于确定眼睛以及眼睛内的结构的形状和位置的组件或设备108。臂107在其近端,即沿激光束路径最远的端部,并且因此离激光束源最远,并且在设备108下方,具有患者接口设备(pid)(在该图中未示出)。臂107具有监控器109,其在铰接臂上在箭头109a的方向上移动。监控器可以提供信息,例如手术、系统状况、激光状态、超声状态、白内障密度、超声设置、激光模式设置,并且可以接收外科医生的输入和指令。监控器与系统100控制系统进行控制通信,监控器也可以包括系统100控制系统的部分或全部。监控器与激光控制系统和超声控制系统直接、或通过系统100控制系统、通过监控器109以及它们的组合和变体进行控制通信。监控器及其铰接臂可以位于系统100中的其他结构上或者可以是独立式的。可以使用一个、两个和额外的监控器。监控器可能具有3d观察或显示能力。
129.臂107形成或包含激光束传输结构,例如为激光束的传输提供自由空间的空心管。在实施例中,臂107可以包含在自由空间中的光束路径,或用于将激光束传输到例如扫描仪的光纤,该扫描仪位于管的近端而不是远端,即靠近的端外壳106。臂107也可以是或包括描述用作光学导管105的类型的任何激光束传输结构。该管还可以包含光学器件。在图1的实施例中,臂107包含非准直的激光束,并且因此臂107可以被称为包含非准直的激光束和激光束路径,换言之,臂107包含、包围或包含沿激光束路径的“非准直空间”。臂107可以容纳或包围准直空间,即激光束路径上的激光束被准直的空间。它可以容纳包含光学器件的空间。它可以容纳准直空间和非准直空间。实施例中的臂107可以从远端点枢转、旋转、伸缩、
铰接以及这些的组合和变体。臂107中的激光束路径的近端包括镜子或光学器件,以将激光束引导通过pid并且到达并进入患者的眼睛。
130.系统100具有两个端口103、104,用于将电缆和线路连接到超声、抽吸、其他工具以及这些的组合和变体。在实施例中,这些端口被配置成连接到超声乳化工具或超声乳化盒系统。端口103和104在外壳102上示出,应理解它们可以在外壳101上,或系统上的其他位置,或者可以是已插入系统100中的超声乳化盒的一部分。
131.在实施例中,激光系统具有外部冷却、内部冷却或这两者。例如流入和流出激光器外壳的冷却流体。
132.系统100具有箭头120所示的高度,系统具有箭头121所示的长度以及箭头122所示的宽度。宽度和长度界定了系统100的占地面积,而体积由高度120、长度121和宽度122界定。治疗激光和系统-通用
133.任何被配置成证明对治疗眼睛、其结构和邻近组织及其病状有用、安全和有效的激光束的激光器都可用于提供治疗激光束。可以使用可调谐激光器、可调节激光器以及这些激光器的组合和变体,例如,可以改变脉冲宽度、可以改变脉冲速率、可以改变功率以及可以改变波长。可以使用一种以上的治疗激光。治疗激光可以是脉冲激光,例如飞秒激光或皮秒激光,以及更长和更短的脉冲、连续激光以及这些的组合。
134.治疗激光可以具有红外光谱、紫外光谱以及其他波长的波长。治疗激光束的波长可以是约300nm至约2,500nm、约1,000纳米(nm)至约1,300nm、1020nm、约1020nm、1030nm、约1030nm、1040nm、约1040nm、1050nm、约1050nm和约1020nm至约1050nm,以及这些以及其他的组合和变体。
135.治疗激光的脉冲持续时间可以是约1fs至约100ps、约200fs至约500ps、约300fs至约100ps、约300fs至约10ps、约300fs至约2,000fs,以及这些波长的组合和变体,以及更长和更短的持续时间。该系统具有的一个或多个“短脉冲持续时间”治疗激光器的脉冲宽度可以是300fs、约300fs、350fs、约350fs、400fs、约450fs、500fs、约500fs、约300fs至约600fs以及这些的组合和变体。该系统具有的一个或多个“长脉冲持续时间”治疗激光的脉冲持续时间可以是1000fs、约1000fs、1200fs、约1,200fs、1,300fs、约1,300fs、1,500fs、约1,500fs、约1,200fs至约1,600fs以及这些的组合和变体。
136.这些双光束实施例,即至少同时具有短脉冲持续时间和长脉冲持续时间的治疗激光束具有若干优点和益处,例如,包括减少对诸如金刚石刀片和刀具的装备的需求和使用的能力。因此,降低了成本、感染风险和手术时间。
137.治疗激光束的脉冲重复频率可以是约50khz至约5兆赫兹(mhz)、约50khz至约2mhz、约50khz至约1mhz、约50khz至约750khz、约100khz至约200khz、约150khz至约350khz、约100khz、约150khz、约200khz、约300khz以及这些的变体和组合以及更大或更小的重复频率。
138.治疗激光束的特定脉冲重复频率下的平均输出功率可以是约1瓦(w)至约8w、约2.5w至约5w、约3w至约4.5w、约3w至5w、小于6w、小于5w、发生激光诱导光学击穿(liob)、光致破裂或两者的任何功率以及这些的组合和变体,以及更低和更高的功率。
139.这些系统的实施例还可以执行亚阈值(sub-threshold)治疗、诊断以及这些的组
合和变体。因此,治疗激光束可以以低于将发生liob的点的功率或方式传送到眼睛。治疗激光束可以以一定功率或以功率低于发生光致破裂的点的方式传输到眼睛。因此,在本发明手术的实施例中,可以执行亚阈值激光手术,可以执行诱导光致破裂的激光手术并且可以执行超声乳化术,并且这些手术中的一些或全部的组合和变体可以是在不移动患者或设备的位置的情况下执行。
140.治疗激光束的脉冲能量可以是约1纳焦耳(nj)至约2毫焦耳(mj)、约1nj至约1mj、约2微焦耳(μj)至约70μj、约5μj至约45μj、从约2μj至约35μj、约10μj至约30μj,小于45μj、小于35μj、发生光致破裂、liob或这两者的任何脉冲能量、以及这些的组合和变体、以及更低和更高的能量。
141.本系统的治疗激光束可以具有一个或多个上述光束特征,例如波长、持续时间、重复频率、功率和脉冲能量,以及这些的组合和变体。
142.可产生1030nm波长的超短激光脉冲的yb:yag激光器可用作治疗激光器。通常,治疗激光提供的光束具有可透过角膜、房水和晶状体的波长。光束可以具有短脉冲长度,连同能量和光束大小,以产生光致破裂、liob或两者的目标眼组织,例如角膜、角膜缘、晶状体囊、晶状体、白内障组织、混浊组织和其他组织。因此,如本文所使用的,术语激光照射或照射是指被传递到通过其自身或与其他脉冲组合产生治疗效果(例如liob)的位置的激光束脉冲。如本文所用的,术语光致破裂本质上是指通过激光将物质转化为气体。在实施例中,可以采用约300nm至2500nm的波长。可以使用从大约1飞秒至100皮秒的脉冲宽度。可以使用从约1纳焦耳至1毫焦耳的能量。脉冲频率(也称为脉冲重复频频率(prf)和以赫兹为测量的每秒脉冲数)可以从约1khz至几ghz。通常,较低的脉冲速率对应于商用激光设备中较高的脉冲能量。取决于脉冲长度和能量密度以及其他因素,可以使用多种激光器类型来产生治疗效果,例如引起眼组织的光致破坏、liob或两者。因此,此类激光器的实例包括:delmar photonics inc.trestles-20,其为钛蓝宝石(ti:蓝宝石)振荡器,波长范围为780nm至840nm,脉冲宽度小于20飞秒,prf为约100mhz,2.5纳焦耳;clark cpa-2161,其为放大的ti:蓝宝石,波长为775nm,脉冲宽度小于150飞秒,prf为约3khz,850微焦耳;imra fcpa(光纤啁啾脉冲放大)μjewel d系列d-400-hr,其为yb:光纤振荡器/放大器,波长为1045nm、脉冲宽度为小于1皮秒、prf为约5mhz、100纳焦;coherent staccato,其为yb:yag,波长为1030nm,脉冲宽度约1.5皮秒,prf约80khz,30微焦;以及,coherent rapid,其为yb:yag波长为1030nm,脉冲宽度为约1.5皮秒,并且可以包括一个或多个放大器,以在25khz至650khz的prf下实现约2.5至10瓦的平均功率,并且还包括多脉冲能,其可以门通(gate)两个单独的50mhz脉冲序列,以及imra fcpa(光纤啁啾脉冲放大)pjewel d系列d-400-nc,其为yb:光纤振荡器/放大器,波长为1045nm、脉冲宽度小于100皮秒、prf为约200khz、4微焦。这些和其他类似的激光器可以用作治疗激光器并产生治疗激光束。
143.在美国专利申请公开号2016/0302971、2015/0105759、2014/0378955和美国专利号8,262,646和8,708,491中公开和教导了用于在眼睛上执行激光操作的激光系统、方法和设备的实施例,每个专利的全部公开内容都通过引用并入本文。激光束传输-通用
144.总体而言,用于将治疗激光束传输到眼睛的自然晶状体的光学器件的实施例应该
能够在x、y和z维度上以精确和预定的模式向自然晶状体提供一系列照射。光学器件还应提供预定的光束斑尺寸,以在激光能量到达天然晶状体或其他目标组织时引起光致破裂、liob或两者。因此,光学器件可以包括但不限于:xy扫描仪;z聚焦设备和聚焦光学器件。聚焦光学器件可以是常规聚焦光学器件、平场光学器件、远心光学器件以及它们的组合和变体,每个都具有相应的计算机控制聚焦,从而实现在x、y、z维度上的校准。例如,xy扫描仪可以是一对带有位置检测器反馈的闭环检流计。这种xy扫描仪的实例是cambridge technology inc.6450型、scanlab hurryscan和agres rhino scanner。这种z聚焦设备的实例是phsyik international peizo聚焦单元型号esee z聚焦控制和scanlab varrioscan。激光控制系统-通用
145.总体而言,用于传输治疗激光束的控制系统的实施例可以是能够选择并控制xyz扫描参数和激光发射等的任何计算机、控制器、软件硬件以及它们的组合和变体。这些组件通常可以至少部分地与接口连接到xy扫描仪、z聚焦设备、激光器以及它们的组合和变体的电路板相关联。除其他之外,激光控制系统可以包含引导激光通过一个或多个激光发射模式的程序。激光控制系统还具有与系统控制系统集成,并且与超声控制和监控器或控制面板一起起作用或以其他方式作为集成系统工作的进一步能力。系统控制器、激光控制器、超声控制器以及它们的组合和变体还可以控制系统的其他组件,以及维护数据、获取数据、分析数据和图像、准备和建议表格和治疗以及执行计算。控制系统可以包含引导激光通过一个或多个激光发射模式的程序。位置和形状确定-通用
146.通常,在实施例中,用于确定眼睛以及眼睛内结构的形状和位置的组件或设备可以是光学相干断层扫描(oct)、具有单个可移动相机、多个固定相机、这些的组合和变体的沙姆设备以及其他类型的进行此类确定的设备。在实施例中,该设备确定晶状体的部分或眼睛的其他结构或与眼睛相邻的组织与激光器(例如光学器件头)的相对距离。在实施例中,该距离通过例如pid保持恒定。在实施例中,该设备确定晶状体和其他结构相对于所有三个维度上的激光传输模式的扫描坐标的位置。这可以通过几种方法和设备来实现。例如,镜片的xy共轴性(centration)可以通过经由共瞄准相机系统(co-bore sighed camera system)和显示器观察镜片或通过使用直视光学器件并且然后手动将患者的眼睛定位到已知中心来实现。然后可以通过使用光学三角测量或激光和ccd系统的距离测量设备(例如微型epsilon opto ncdt 1401激光传感器、aculux laser ranger lr2-22以及这些的组合和变体)来确定z位置。也可以使用3维观察和测量装置来确定镜片的x、y和z位置。例如,可以使用vision engineering的hawk 3轴非接触式测量系统进行这些确定。可用于确定镜片位置的装置的又一实例是3维测量装置。该装置将包括一个或多个可以观察参照物和自然晶状体的相机,并且还将包括用于照亮自然晶状体的光源。这种光源可以是结构化光源,例如设计成基于几何形状生成3维信息的狭缝照明。另外,一个、两个、三个、四个或更多光源可以定位在眼睛周围并且电子激活以在多个平面切片上提供眼睛(特别是角膜和晶状体)的多个视图、平面图像,这些平面切片可以然后集成以提供有关这些结构的与激光系统相关的位置和定位信息的数据。用于确定眼睛和结构的形状和相对于激光、激光照射模式和激光束位置的组件、方法、设备的实例在美国专利出版物和专利号2018/0085256、2016/
0302971、2015/0105759、2012/0330290、2016/0030244、9,180,051和8,708,491中公开和教导,每个专利的全部公开内容通过引用并入本文。用于确定眼睛位置的虹膜定位设备在美国专利公开号2015/0105759中进行了教导和公开,其全部公开内容通过引用并入本文。通常,图像(光学图像)从眼睛的结构、pid或其他结构沿光学路径(例如,沿着可以通过自由空间、光学部件(透镜、镜子、光纤等)和两者的图像路径)返回到设备或系统。患者接口-通用
147.这些系统的实施例的另一个部件可以是激光患者接口或pid。应当注意,所有或部分pid通常不是系统的一部分,而是优选地是单次使用的设备(例如,一次性的),其在激光手术之前或为激光手术准备时为每位患者添加到系统中。在实施例中,该接口提供了天然晶状体和激光之间的x、y、z位置在手术期间保持固定,这包括确定xyz位置的测量步骤和将激光以照射模式传输到晶状体的传输步骤两者。接口设备可以包括光学透明的压膜(applanator)。这种接口的一个实例是吸环压膜,其固定紧靠眼睛的外表面并且然后定位紧靠激光光学外壳,从而固定激光器、眼睛与自然晶状体之间的距离。3维观察和测量装置的参考标记也可以放置在此压膜上。此外,压膜的下表面与角膜之间的接口可以是可观察的,并且这种观察可以起到参考的作用。激光患者接口的另一个实例是具有下环的设备,该设备具有用于将接口固定到眼睛的抽吸能力。该接口还具有平坦的底部,其压靠在眼睛上,使眼睛的形状变平。该平底由透射激光束的材料构造,并且还优选地,虽然不是必须的,透射可见光谱内的眼睛的光学图像。上环具有用于与激光光学器件的外壳接合的结构、沿激光束的路径与激光器具有已知距离并相对于激光器固定的一些结构,以及这些的组合和变体。患者接口设备,以及使pid与眼睛接合的系统,以及使pid与激光系统接合的系统的实例在美国专利申请公开号2011/0190739、2017/0290703、2010/0022994、2011/0022035和2015/0088175中公开和教导,每个专利的全部公开内容以引用的方式并入本文。
148.在测试和校准期间,激光束以及优选地治疗激光束可以通过pid的窗口传输。超声/超声乳化-通用
149.可以使用任何被配置成提供对治疗眼睛、其结构和邻近组织及其病状有用、安全和有效的超声能量的超声发生器,例如超声驱动器、喇叭或其他产生超声能量的设备,从而为本发明的系统提供超声能量。特别地,在本发明系统的实施例中,可以使用或重新配置任何超声乳化系统(优选地由医疗设备法规机构批准的)的一些或所有部件。
150.通常,在本发明集成系统的实施例以及它们可以执行的方法中,超声乳化包括优选地使用治疗激光束进行角膜切口、巩膜切口(以及这些的组合和变体),以及插入超声乳化机头(其通常由超声驱动的针组成),以便例如乳化,即液化天然晶状体,将白内障破碎成小块,以及这些的组合和变体。优选地,该超声手术在已经被激光束切割、切片、软化以及这些的组合和变体的晶状体、晶状体材料、白内障材料上执行。随后可以使用相同的机头或另一机头去除乳化碎片。然后外科医生可以通过切口将植入物例如人工晶状体、iol插入眼睛中。
151.在实施例中,超声乳化针的尖端的振动的超声乳化频率可以是大于20khz、大于30khz、大于40khz、约30khz至约50khz、约30khz至约45khz、小于约50khz、约35khz至约45khz、约35khz、约40khz、约45khz、约35khz、约40khz、约45khz以及这些的组合和变体,以及更高和更低频率。
152.在实施例中,超声针的纵向移动行程长度可以是约28.1μm至约95.25μm、约25μm至约160μm、约50μm至约90μm、约50μm至约150μm,约25μm至约110μm、约35μm至约100μm、约20μm至约60μm、约80μm至约150μm、以及这些的组合和变体,以及更大和更小的距离。
153.通常,超声乳化系统的脉冲频率可以是约每秒20次脉冲至约每秒150次脉冲,以及这些的组合和变体,以及更高和更低的值。并且,这些系统的突发脉冲宽度可以是约30毫秒至约4毫秒以及这些的组合和变体,以及更高和更低的值。
154.在本发明系统的实施例中,超声乳化机头通常联接到冲洗源和抽吸泵。抽吸泵位于系统的外壳中。机头包括用于插入患者眼睛前房内的远端尖端,其发射超声能量或以超声频率振动,以切割、乳化晶状体或天然晶状体以及这些的组合和变体。机头还包括靠近远端尖端的冲洗端口,其通过冲洗管线联接到冲洗源,以及在远端尖端处的抽吸端口,其通过抽吸管线联接到抽吸泵。来自冲洗源的液体(通常是一瓶高位的盐溶液)经由冲洗管线和冲洗口冲洗到眼睛中,并且冲洗液和乳化的晶状体材料通过抽吸泵经由抽吸口和抽吸管从眼睛中抽出。
155.可以配置成超声系统执行的用于眼睛的其他医疗技术通常还包括乳化、冲洗眼睛和抽吸。此类手术可包括或可不包括使用乳化、冲洗和抽吸来破坏、改变或去除自然眼睛的特征。因此,由手术控制台传递的超声功率,以及通过冲洗或抽吸控制台进出患者的流体流动,以及随后需要控制超声乳化机头以传输上述内容,都由系统,由外科医生以及这些的组合和变体进行选择并控制。
156.本系统的实施例的超声乳化部件,例如子组件,通常包括控制系统,例如可编程微处理器,带有操作者选择的用于控制的预设(例如抽吸率、真空度和超声波功率水平)的控制台(在实施例中其是系统监控器)。超声乳化机头可以通过电缆与系统互连,用于为提供乳化的压电换能器供电和控制。管道向眼睛提供冲洗液,并能通过控制台控制下的机头从眼睛中抽出抽吸液。
157.在实施例中,在机头操作期间始终确定并测量与机头操作相关的相位角和其他方面,例如以调整驱动电路、实现最佳相位角以及以其他方式影响从超声乳化术机头到组织中的能量转移。可以通过监控机头电信号并调整频率和其他方面来提供机头的自动调谐以保持与所选参数的一致性。
158.在实施例中,控制系统基于施加到机头压电换能器的电压与压电换能器汲取的电流之间的相位角、提供给机头的功率脉冲的幅度以及这两者来满足对超声乳化机头的功率控制的要求。可以针对特定机头调整典型布置,并且例如,可以以连续方式或以受外科医生控制的一系列连续突发脉冲(solid burst)施加功率。例如,系统可以供电150ms,然后停止供电350ms,并且可以在施加供电的必要持续时间内重复这个开/关序列。在上述150ms周期过程中的功率施加可以定义为25khz到50khz正弦波的恒定施加。在某些情况下,外科医生或操作者可以施加功率突发脉冲一段时间,然后停止施加功率,然后在初始或另一个功率设置下重新施加。突发脉冲的频率和持续时间通常是可控的,应用于受影响区域的突发脉冲的长度也是可控的。不施加功率的时间段可以允许使用抽吸(例如可以由机头或辅助抽吸装置提供)去除破碎片的时间段。
159.在本发明系统的实施例中,用于超声功率传输的控制方法通常可以采用多种模式,例如可变、预定可变、面板(panel)和线性。可变模式为外科医生或操作者选择超声治疗
条件提供了最大的灵活性,它可以被视为手动的。预定可变模式是控制系统根据所提供的激光治疗、白内障的等级以及在激光治疗手术之前、期间和之后由系统获得的其他信息来确定超声治疗的最佳范围的模式。因此,在这种模式下,系统与激光控制器系统和超声乳化控制系统一起工作,预先确定并提供、推荐并且优选优化超声乳化手术的范围和设置。通常,面板模式典型地在使用者选择时提供严格的固定值。通常,线性模式仅允许从0%到100%的最简单形式的线性调整。在实施例中,中间调整、或在系统推荐的选项或范围之外的调整,以提供超声治疗不是随意可用的,例如,它们被限制,部分是为了最小化手动调整的需要和固有的风险。
160.超声乳化超声探针将能量传输到眼睛中,该能量用于在激光破碎或切割后粉碎剩余的白内障晶状体材料,以有助于剩余碎片的乳化和抽吸。超声乳化超声探针将能量输送到眼睛中,该能量用于破碎没有对白内障进行激光碎裂的白内障,例如,在外科医生选择进行激光囊切开术和激光切口以插入超声乳化探针,但是不使用激光来破碎晶状体或白内障的情况下。超声乳化超声探针将能量传输到眼睛中,该能量用于粉碎白内障,此目的通过在控制开关(例如,脚踏板)被压到预定位置时,以固定频率振动来实现,同一控制开关可以控制发射或传输治疗激光束和模式,可以使用其他类型的控制开关、按钮、触发器、音频等。在实施例中,为了增加超声功率的量,机器增加探针的行程长度。
161.通常,探针可以纵向方式、横向方式以及这些方式的组合和变体方式传输功率。超声乳化针以纵向方式前后移动。在后一种方式中,超声功率也通过探针的横向运动传递并且可以提高切割效率,例如,通过减少晶状体材料的排斥力。
162.总体而言,超声乳化中存在两种横向运动。扭转横向运动,其中超声乳化尖端沿其主轴以旋转方式振荡。横跨横向运动,其中超声乳化尖端以椭圆路径移动。总体而言,基于它们的运动类型,扭转通常在有角度的超声乳化针效果更好,而横跨通常在直针或有角度的针上同样有效。将横向运动超声乳化与传统的纵向超声乳化相结合可以提高切割效率,因为白内障材料在不止一个方向上被乳化。
163.尽管现有技术将超声乳化描述为传输超声能量,但应当理解,当金属超声乳化针击中目标材料(例如,激光影响的白内障材料)时,超声乳化针的行程产生机械冲击。通常,针头还会产生气穴和内爆,因为正好在超声乳化针的前面会产生微孔。流体和粒子波传播到白内障材料中并且最后产生热量作为副产物。非常重要的是避免选择会导致过多热量积聚的超声乳化功率设置,因为这种设置会灼伤角膜并损坏脆弱的眼结构。不受限制地流过周围的冲洗套管也很重要,因为平衡盐溶液在超声乳化探针周围移动的持续冷却效果有助于防止热量积聚。
164.在本发明系统的实施例中,在手术期间,系统控制器、超声乳化控制器以及它们的组合和变体可以监控、记录并分析平均超声乳化功率(以最大值的百分比给出)以及在超声乳化超声功率传输期间的总时间,以及其他条件和因素。在实施例中,常用监控器可以将这些值显示为“u/s ave”(代表“超声平均值”)和“ept”(代表“超声乳化经过时间”)以及其他参数和特征。传输到眼睛的总能量是超声乳化功率乘以功率开启时间的乘积,称为绝对超声乳化时间(apt)。系统控制器、超声控制器以及它们的组合和变体可以通过将“u/s ave”乘以“ept”来自动计算apt,以便外科医生可以比较不同情况下传输的总超声能量。
165.在实施例中,为了最大限度地减少apt,外科医生需要减少超声乳化时间、平均超
声乳化功率以及这些的组合和变体。可以通过选择显示器上的参数,或通过限制控制开关的位置,或通过降低机器上的最大超声乳化功率水平来降低平均超声乳化功率。只有当白内障碎片位于超声乳化尖端并且仅真空不足以吸出碎片时,才可以通过施加超声功率来减少超声乳化时间。此外,可以通过提供更短的脉冲或超声乳化功率的突发脉冲而不是连续超声功率或通过降低占空比(开:关脉冲的比率)来减少超声乳化时间。这种将超声功率分解成更小的脉冲和突发脉冲的包(packet)的方法称为超声功率调制。
166.在实施例中,基本功率设置可以是连续的、脉冲的和突发的。在连续功率设置中,随着功率的变化,能量输送是连续的,由控制开关位置(例如脚踏板的下压量)控制。
167.在实施例中,系统提供了这些的组合和变体,以及提供这些功率模式的杂合或混合水平的功率设置,因为功率的变化可以以预定方式由控制系统结合超声乳化控制系统,并且在某些情况下还有外科医生输入一起工作而更准确地确定并控制。
168.在实施例中,以脉冲模式,脉冲功率通过控制开关的位置(例如,脚踏板被压下多远)线性增加。它被放置(例如被压下)的越远,每个连续的能量脉冲的功率就越大。脉冲模式操作的实施例的一个特征是在每个能量脉冲传输之后,在增加的能量脉冲之间存在不传输能量的时间段,即“关”时间段。在相等的“开”与“关”脉冲时间之间交替减少了热量并将一半的能量传输到眼睛中。
169.在实施例中,在突发模式中,每个突发脉冲具有相同的功率,但是每个突发脉冲之间的间隔随着控制开关的推进(例如,脚踏板被压下)而减小。在实施例中,控制开关被推进(例如,脚踏板被压下)的越远,每次突发脉冲之间的“关”时间段将越短。因此,在最大控制开关位置(例如,在最大脚踏板下压)时的实施例中,能量的突发变成能量的连续传输。
170.在实施例中,突发模式可以提供晶状体核的超声乳化辅助抽吸。外科医生使用超声乳化机器的真空和流体来吸出白内障并且然后仅在必要时给予少量超声乳化功率的突发脉冲。因为一个,优选地控制系统,可以编程或推荐这些非常短(快至几毫秒)的超声乳化功率的突发脉冲,因此可以有效地传递数百个微小的突发脉冲,并且仍然少于例如1秒的总超声乳化时间。
171.本发明系统提供了以下实施例,其中脉冲和突发脉冲超声乳化设置以及其他设置的可编程性范围具有与现有系统相同的特征,并且在实施例中大大扩展了现有系统。与任何现有系统不同,本发明系统的实施例提供了基于激光系统传输的激光模式或治疗而具有预定并且推荐的超声乳化设置的能力,并且无需外科医生或患者移动即可立即提供这些设置。
172.在实施例中,超声乳化控制系统单独或与系统控制系统组合可以执行各种主动监控和控制功能,例如:监控眼压(iop)并可以调整系统的功能以将iop维持在所希望的压力;监控和控制真空度;优化功率设置;并预测压力变化并主动响应闭塞中断。为超声乳化系统操作参数的监控和自主控制提供该信息和数据的传感器可以在系统中,在各种泵和设备上(基于电流或其他电负载),或者在机头中或机头上。
173.在本发明超声激光系统中可以使用的性能特征和部件的实例是alcon 视觉系统和alco active 机头和混合尖端。在实施例中,超声乳化机头可具有内置流体压力传感器,其实时检测压力并与系统控制系统、超声乳化系统控制系统或两者通信。在本发明超声激光系统中可以使用的各种特征和部件的
实例是amo whitestar pro超声乳化系统。
174.超声乳化系统和子系统的特征、使用方法和部件在美国专利号8,020,565、9,549,850、9,549,851、9,849,030、9,877,865、9,931,447、9,937,077、10,258,505、10,314,953、10,111,990和美国公开专利申请号2019/0133824、2019/0021906、2019/0099526、2017/0266046和2017/0112668中公开并教导,每个专利的全部公开内容通过引用并入本文。
175.超声波-激光组合-通用
176.这些实施例包括任何组合的激光超声系统,并且特别是包括组合的超声乳化激光系统和组合的超声乳化飞秒激光系统(“飞秒激光超声乳化”或“超声乳化飞秒激光”互换地使用,除非另有明确说明)。这些实施例可以具有或利用治疗激光和系统、激光束传输、激光控制系统、位置和形状确定、患者接口和超声/超声乳化的实施例、特征、功能、参数、部件或系统中的一个或多个,本说明书中公开的总体教导,以及实例中系统的一个或多个特征。
177.在激光超声系统,并且特别是激光超声乳化系统,并且更特别是飞秒激光超声乳化系统的优选实施例中,该系统具有两个治疗激光束,它们可以由相同或不同的激光源提供,一个是短脉冲持续时间的激光束并且第二个是长脉冲持续时间的激光束。
178.通常,短脉冲持续时间激光用于对角膜进行手术,例如切割角膜、角膜缘松弛切口等。通常,长脉冲持续时间激光束用于对晶状体进行手术,例如囊切开术、晶状体破碎、白内障破碎等。
179.具有多种类型的不同治疗激光束(例如,短脉冲持续时间和长脉冲持续时间)的这些实施例可以具有或利用治疗激光和系统、激光束传输、激光控制系统、位置和形状确定、患者接口和超声/超声乳化的实施例、特征、功能、参数、部件或系统中的一个或多个,本说明书中公开的总体教导,以及实例中系统的一个或多个特征。
180.系统,例如飞秒激光超声乳化系统,可以具有多个治疗激光束,例如,1、2、3、4个或更多个具有不同特性的光束。这些激光束可以遵循相同的激光束路径并且因此穿过相同的光学部件并与之相互作用,它们可以行进穿过不同的激光束路径并且因此穿过不同的光学部件并与其相互作用,以及这些的组合和变体。例如,该系统可以具有具有第一脉冲持续时间和第一功率或能量的第一激光束,具有第二脉冲持续时间和第二功率或能量的第二激光束,以及具有第三脉冲持续时间和第三功率或能量的第三激光束。第一脉冲持续时间、第二脉冲持续时间和第三脉冲持续时间、第一功率、第二功率和第三功率以及第一能量、第二能量和第三能量可以是相同的、不同的以及这些的组合和变体。
181.在实施例中,多治疗激光束激光系统与另一治疗设备,例如超声设备、诊断设备以及它们的组合和变体相关联(集成或模块化)。
182.在长脉冲持续时间和短脉冲持续时间激光束由同一治疗激光源提供的实施例中,在脉冲长度之间切换的时间小于约3秒(sec)、小于约2sec、小于约1.5sec、约3sec至1sec、约2sec、约3sec,以及这些的组合和变体,以及更长和更短的时间。
183.尽管本发明的优选实施例针对激光超声,并且特别是飞秒激光超声乳化系统,但是应当理解,激光系统的本发明的改进和实施例具有价值,并且可以单独使用,而不是激光超声系统的一部分。
184.这些本发明系统的实施例提供了优于现有技术的重要优势。因为本发明系统可以提供最佳的激光能量模式,允许对眼睛进行评估(在传输之后),并且然后无需移动患者,并
且然后以最小的时间延迟(小于1min,小于30sec,小于15sec)执行超声乳化手术,可以实现在白内障手术期间使用尽可能少的超声超声乳化能量的重要目标,并且优选地以对所有患者的预定方式完成。实例
185.提供以下实例以说明本发明的系统、系统的部件、工艺、组合物、应用和材料的各种实施例。这些实例用于说明目的,可以是预见性的,并且不应被视为限制,并且不以其他方式限制本发明的范围。
186.这些实例1至46的实施例可以具有或利用治疗激光和系统、激光束传输、激光控制系统、位置和形状确定系统、患者接口、超声/超声乳化和超声乳化-飞秒激光组合的实施例、过程、方法、特征、功能、参数、部件或系统中的一个或多个,以及在本说明书中提供的一个或多个其他实例和其他实施例中提供的实施例、过程、方法、特征、功能、参数、部件或系统中的一个或多个。
187.实例1
188.转到图2,示出了飞秒激光超声乳化激光系统200的实施例的透视局部剖视图。系统200具有包含在共同外壳206内的激光子系统204和超声乳化子系统205。激光子系统204包括治疗激光束源,并且在实施例中包括慢脉冲持续时间和长脉冲持续时间治疗激光束源。激光子系统204包括界定治疗激光束沿其行进的治疗激光束路径的激光器和沿激光束路径放置或定位的光学部件。这些部件将包括z方向聚焦光学器件和x-y扫描仪。
189.系统200具有容纳治疗激光束路径以及其他光学路径的臂201。在实施例中,臂201还容纳或承载用于成像和定位设备203的控制和电力电缆以及对接组件(该图中未示出)。臂201在其近端具有治疗激光束传输头202。激光传输头202具有位置和形状确定装置(其可以是oct系统或本发明实例的沙姆系统),以及这些和其他形状和位置确定装置的组合和变体。激光传输头具有对接和定位系统,其与pid一起对接患者的眼睛。
190.系统200具有用于激光子系统204和超声乳化子系统205的公共电源207。公共电源207为整个系统提供所有电源,从而消除了对辅助电源或电源的需要。这允许系统插入手术室中的单个电源内。
191.系统200具有公共控制系统208。公共控制系统208具有控制器操作控制软件或操作指令。在优选实施例中,公共控制系统208与以下中的一个或多个并且优选地所有以下进行控制通信:激光子系统中的控制系统和控制器212;超声乳化子系统中的控制系统和控制器211;与操作者接口209的控制通信;与紧急停止210控制通信;以及与例如患者病历系统、会计系统以及这些配置的组合和变体网络通信。
192.通常,对接系统以及成像和位置确定装置由激光子系统控制系统控制。在实施例中,它们可以全部或部分由公共控制系统208直接控制。
193.在实施例中,激光控制系统和超声控制系统是部分的,并且可以完全集成到单个公共控制系统中。因此,在实施例中,飞秒激光超声乳化系统中仅存在一个控制系统或单个控制系统。
194.实例2
195.转向图3,示出了沿着实例1的线的飞秒激光超声乳化系统的实施例,相同的数字表示相同的部件。在图3的实施例中,x-y扫描仪301位于激光传输头202中。
196.实例3
197.转向图4和图4a至图4d,示出了本发明激光系统、激光超声系统、并且特别是飞秒激光超声乳化系统的实施例的光学路径和光学配置的示意图。
198.光学系统430具有四个光学系统400、401、402、403,它们可以具有不同波长、功率和用于不同目的。光学系统400用于治疗激光束并且包含光学部件并且界定治疗激光束沿其行进的治疗激光束路径。光学系统403用于图像和位置确定装置,例如沙姆设备,其除其他之外确定眼睛结构的形状和位置,并且与治疗激光束和激光束路径直接相关。该系统403提供图像路径。光学系统401是用于相机,优选为ir相机,如从图中可以看出,该光束路径沿该路径的大部分的治疗激光束路径400行进,即,与其重合。该系统401提供图像路径。两条路径在分束器处组合,并且用于治疗激光的vario(z轴激光偏转光学器件)不是相机光束路径401的一部分。光学系统402是用于第二相机,优选彩色相机。该系统402共享一些治疗激光束路径。该系统402提供图像路径。
199.这些系统还具ir dtp("顺管而下",例如配置为沿激光束路径观察)相机480,分束器立方体481、482(r:880(s);t:880(p),1030(s p)),振镜483,dtp继电器491,变焦器484,1x望远镜485,f-θ透镜486,彩色dtp相机487,分束器立方体489(r:880,1030;t:可见)和沙姆相机组件490。
200.望远镜485有一对远心120mm透镜493、494。沙姆相机组件490具有倾斜角为15度的像平面470、thorlabs透镜(30mm)471、孔径光阑(4.4mm)472和折叠镜473。ir dtp相机480具有孔径光阑(3mm)450。彩色dtp相机487具有孔径光阑(2mm)451。
201.这些光学系统400、401、402、403的节段或部分可以位于或包含在激光系统的实施例、激光超声系统和飞秒激光超声乳化系统的实施例的各种外壳和部件中。因此,通过说明,如图4所示,光学系统的部分可以容置或包含在远端外壳420(例如图5的外壳503,或图1的外壳106),臂421(例如图3的臂201,图5的光管504或图1的臂107)以及激光头或近端外壳423(例如近端组件或激光头(例如图1中的臂107的近端,图2中的头202,或图5中的头505)内。这些光学系统400、401、402、403也可以分布在远端外壳420a、臂或连接器421a与近端外壳(例如近端组件或激光头423a)之间并包含在其内,如图4e的配置所示。这些光学系统400、401、402、403也可以分布在远端外壳420b、臂421b与近端外壳(例如近端组件或激光头423b)之间并包含在其内,如图4f的配置所示。还设想了用于这些光学系统的其他分布和包含或容置布置。
202.转向图4g,可见光学系统430具有四个光瞳461、462、463、464。在这个实施例中,光瞳是轭合远心光瞳。值得注意的是,四个光瞳中只有三个沿着治疗激光束路径。
203.实例3a
204.实例3的实施例与治疗激光一致,即,照亮眼睛的结构,使得来自403的光学部件等可以拍摄图像以知道眼睛结构的位置的扫描激光。此外,还存在眼睛固定光源,以帮助患者在对接过程中进行固定。该光的固定光源和路径经由在图4g中的402与403之间的分束立方体。
205.实例4a
206.飞秒激光超声乳化系统具有图像和位置确定装置是基于超声的成像系统。在一个实施例中,图像和位置确定装置是光学相干断层扫描(oct)系统,其可以确定晶状体结构和
眼睛结构相对于治疗激光和治疗激光束的形状和位置。oct系统与激光子系统控制系统、超声乳化子系统控制系统、飞秒激光超声乳化系统控制系统以及它们的组合和变体集成并控制通信。
207.例如,oct系统也可以用在图1、2、3、5、14的实施例以及其他实施例中。
208.实例4b
209.图1、2、3、5和14的实施例具有并使用沙姆相机系统作为它们的图像和位置确定装置。沙姆相机系统与oct系统完全不同。沙姆相机具有非常不同的操作方式,以不同的方式运行,并提供与oct系统非常不同的输出(例如结果)。本发明的沙姆系统被认为在眼睛结构的位置和形状确定方面优于oct。
210.沙姆相机系统与激光子系统控制系统、超声乳化子系统控制系统、飞秒激光超声乳化系统控制系统以及它们的组合和变体集成并控制通信。
211.沙姆相机系统还可以与脚踏开关、并且优选无线脚踏开关进行控制通信。控制通信可以通过总线,例如图22a所示的通信总线。
212.实例5a
213.在飞秒激光超声乳化系统的实施例中,超声乳化子系统具有以下部件,并且特征是集成了蠕动泵和文丘里泵的系统,从而允许外科医生独立地选择用于超声乳化或玻璃体切除手术的任一泵模式。该超声乳化子系统的特征包括:双泵系统,蠕动泵和文丘里泵;高真空闭塞;高速玻璃体切除术。超声乳化子系统能够执行以下程序:透热疗法、冲洗、造型(sculpt)、flop和chop疗法、vit疗法、粘弹性补充疗法(visco)。使用者接口和软件为这些和其他超声乳化手术提供菜单项和监控字段(monitory field)。该接口可以具有gui屏幕和菜单,例如图23a至图23d所示的类型。
214.实例5b
215.在飞秒激光超声乳化系统的实施例中,超声乳化子系统具有来自alcon视觉系统和alco active机头和hybrid的部件。
216.实例5c
217.在飞秒激光超声乳化系统的实施例中,超声乳化子系统具有来自amo whitestarpro超声乳化系统的部件。
218.实例6
219.在激光超声系统的实施例中,并且特别是对于飞秒激光超声乳化系统,该系统具有安全联锁。安全联锁优选地位于公共控制系统中,但也可以位于激光控制系统、超声乳化控制系统以及它们的组合和变体中,或者是其一部分。安全联锁可防止超声乳化系统运行时发射治疗激光。在实施例中,联锁系统中存在三个级或门:(i)超声乳化系统断电
–
可以操作激光:(ii)超声乳化系统已开启,并且正在预热,但不可运行或没有正在运行-可以操作激光;以及(iii)超声乳化可运行或正在运行-不能发射激光。
220.在实施例中,级(iii)将允许激光在超声乳化系统可运行但没有正在运行时操作。在该实施例中,只有当超声乳化系统正在运行时,即传输超声波能量时,治疗激光器才会被锁定,即不能发射或传播激光束。
221.实例6a
222.在实施例中,联锁系统中的三个级或门是:(i)超声乳化系统和飞秒激光系统要通电、启动/预热;(ii)超声乳化系统已开启并已准备好但不可运行——可以操作激光;以及(iii)超声乳化可运行或正在运行-不能发射激光。
223.实例7
224.转向图5,示出了飞秒激光超声乳化设备或系统500的透视图。该系统具有下外壳或主外壳501(在图中仅部分示出)。下外壳501包含超声乳化系统、用于超声乳化盒和在程序期间的盒的位置(location)、用于产生治疗激光束的治疗激光器和控制系统。滑动机构502位于主外壳501内。滑动机构502提供上外壳或可移动外壳503的移动。可移动外壳503由滑动机构502沿箭头502a的方向(即横向、水平或朝向和远离患者)移动。
225.滑动机构可以通过例如由例如操纵杆控制的电机自动移动,它可以手动移动并且可以这些的组合移动,例如在电机可以自由转动的情况下。电机可以具有设定或预定的位置,也可以与智能头枕进行控制通信,从而将激光传输头505精确定位或安置在患者头枕上方并且藉此在患者和患者的眼睛上操作。
226.上部或可移动外壳503包含激光聚焦z方向光学器件、x-y扫描光学器件和其他光束加工或处理部件。外壳503还可以包含如实例3中所讨论的其他光学系统和光学路径。
227.外壳503通过铰接式光管507与治疗激光器光学通信。铰接式光管提供自由空间激光束路径,该路径将激光束从下外壳501引导到外壳503,并且沿着激光束路径将治疗激光束传输到外壳503内的光学部件。在该实施例中,如在5i中更详细地看到的那样,铰接式光管507具有六个接头,每个接头的内侧具有反射面。优选地,光管507保持治疗激光和外壳501与外壳503和该外壳中的光学部件在外壳503的所有可能的位置和方向上光学通信。
228.外壳503具有臂504,其是刚性中空光管,该管容纳或包含一个或多个光学路径,包括治疗激光束路径,以及如实例3中讨论的其他路径。臂504将外壳503与激光传输头505连接,并使这些部件保持光学通信。臂504还可以承载控制和通信电缆、光纤或电线,用于在激光头的部件与控制系统之间传输控制和信息。激光头505位于臂504的近端并且外壳503位于臂504的远端。
229.激光头具有位置和形状确定装置506,其是沙姆设备,具有五个相机。(在实施例中,存在六个固定相机。在实施例中,存在单个可移动相机。)
230.实例8
231.转到图5a至图5h,示出了与图5的系统一起使用的位置调节机构的各种视图和实施例(相同的数字具有相同的含义并指代相同的部件)。
232.转到图5a,位置调节机构510通常位于外壳503远离臂507的另一侧。机构510的部分可以位于外壳503下方和以及壳501之上或之内。
233.图5b示出了横向移动组件531,其是位置调整机构510的一部分。横向移动组件531具有第一板520和第二板521,它们通过例如驱动齿轮或轮可与马达523和522移动地机械地相关联。对于固定柱512,板520、521以弧形方式移动,该弧形方式转化为横向移动,即,在箭头502a的方向上。固定柱512附接到自由移动组件,例如组件513。横向移动组件531与外壳501机械地相关联,并且可以容纳在外壳501上,并且优选地容纳在外壳内。
234.实例9
235.转到图5c,示出了具有四连杆机构的横向移动组件511,其是位置调节机构510a的
一部分;并且提供沿箭头502a方向的移动。横向移动组件511与外壳501机械地相关联,并且可以容纳在外壳501上,并且优选地容纳在外壳内。
236.应当理解,实例8的横向移动组件510可以与实例9的位置调节机构510a一起使用,反之亦然。应理解为自由移动组件513可以与横向移动组件511或横向移动组件531一起使用。可以理解的是可以使用其他自由移动型机械和机电设备,以及横向移动型机械和机电设备。
237.组件511附接到固定柱512。该组件沿箭头502a的方向移动固定柱502。固定柱512连接到自由移动组件513。自由移动组件513以弧形方式、横向方式、竖直方式以及这些方式的组合提供了外壳503的移动,如箭头513a的集合总体上所示的。组件513是平行四边形连杆机构。
238.组件513可以是电动的,可以具有预定位置,或者可以是手动,例如,握住臂504、外壳503或其他部分操作的,以及通过改变外壳503的位置操作的。在实施例中,外壳503、臂504和激光头505是平衡的,使得外壳503可以用小于10磅的力、小于7磅的力、小于5磅的力和小于2磅的力、约2至约7磅的力,约4至约6磅的力、以及这些的组合和变体移动。优选地,一旦移动,外壳503将停留在它被放置的位置,直到受到足够移动它的力作用。(为简单起见,臂504和激光头505未在图5c中示出)
239.图5d到图5h示出了自由移动组件513可以将外壳503放置在其中的一些位置。图5h的位置是用于系统存储和手术室清洁的想法。图5e的位置用于对患者执行激光手术。
240.实例10
241.在实施例中,激光超声系统,并且特别是飞秒激光超声乳化系统具有附接到系统的患者床或支撑物。
242.实例11
243.在实施例中,患者支撑物,例如床,不附接到激光超声系统,并且特别是飞秒激光超声乳化系统。患者支撑物和飞秒激光超声乳化系统可以完全相对于彼此可定位的,它们之间没有物理限制。因此,飞秒激光超声乳化系统可以相对于患者支撑物以任何位置或方向定位(当然前提是患者头部在臂和超声乳化管的可及范围内)。使用a/c电磁场、陀螺仪、加速度计和磁力计的定向/位置跟踪系统用于确定患者头部相对于治疗激光器和治疗激光束路径的方向。该定向跟踪系统可以确定臂(例如图5系统的臂504)的角度在
±
5度、
±
3度、和
±
2度以及更大和更小的精度内。使用该角度调整治疗激光束传输模式(优选地由控制系统),从而对患者眼睛以正确定向角度传输激光束模式。
244.在实施例中,polhemus patriot
tm
6-dof跟踪传感器位于患者头枕中,其中发射器安装在传输系统前部附近的系统框架上。这提供了足够的信息来确定头枕相对于激光传输系统的方向。该定向/位置跟踪系统在附录a中进一步描述,其全部公开内容通过引用并入本文。
245.实例12
246.电磁跟踪系统用于没有超声乳化子系统的独立式治疗激光系统中。独立式治疗激光系统具有未连接到激光系统的患者支撑物。电磁跟踪系统确定患者眼睛与激光系统的定向角度。激光系统配置激光传输模式以满足确定的角度。
247.实例13
248.实例11和12的系统在患者支撑物与治疗系统之间具有柔性或可定位的机械附件。电磁跟踪系统用于确定患者眼睛与治疗系统的位置,并且特别是角度。激光系统配置激光传输模式以满足确定的角度。
249.实例14
250.电磁跟踪系统的部件(例如陀螺仪、加速度计和磁力计)以各种布置方式布置在患者支撑物、患者头部支撑物、患者自身上并且在治疗系统中,其中陀螺仪、加速度计和磁力计是位于一个或多个这些部件中。
251.实例15
252.在实施例中,诸如陀螺仪、加速度计和数字罗盘之类的设备的组合位于患者头枕中,并且两个磁力计位于飞秒激光超声乳化系统中。这提供了足够的设备来确定方向(例如,患者与激光臂的角度)以及激光束路径和模式。
253.使用陀螺仪、加速度计和磁力计的基于罗盘的位置确定系统用于确定患者头部并且特别是要对其执行手术的眼睛相对于治疗激光和治疗激光束路径的位置。该基于罗盘的位置确定系统可以确定臂(例如图5系统的臂504)的角度在
±
5度、
±
3度、和
±
2度以及更大和更小的精度内。使用该角度调整治疗激光束传输模式(优选地由控制系统),从而对患者眼睛以正确定向角度传输激光束模式。
254.在实施例中,陀螺仪和加速度计位于患者头枕中并且两个磁力计位于飞秒激光超声乳化系统中。这提供了足够的设备来确定方向(例如,患者与激光臂的角度)以及激光束路径和模式。
255.基于罗盘的位置确定系统的部件(例如陀螺仪、加速度计和磁力计)布置在患者支撑物、患者头部支撑物、患者自身上并且在治疗系统中以各种布置方式,其中陀螺仪、加速度计和磁力计是位于这些部件的一个或多个中。
256.实例11和12的系统在患者支撑物与治疗系统之间具有柔性或可定位的机械附件。基于罗盘的位置确定系统用于确定患者眼睛与治疗系统的位置,并且特别是角度。激光系统配置激光传输模式以满足确定的角度。
257.基于罗盘的位置确定系统用于没有超声乳化子系统的独立式治疗激光系统中。独立式治疗激光系统具有未连接到激光系统的患者支撑物。基于罗盘的位置确定系统确定患者眼睛与激光系统的定向角度。激光系统配置激光传输模式以满足确定的角度。
258.实例16
259.跟踪系统(例如电磁跟踪系统)的头枕或其他远程部件(即,不是治疗系统的一部分)具有可充电电池,可在单独的充电站、存储容器或在治疗系统上充电。
260.实例17
261.在飞秒激光超声乳化系统的实施例中,控制系统推荐例如匹配、白内障等级、激光功率和模式、以及超声速率、功率、相位角、流量和射流速率以及与机头和超声乳化操作相关的其他方面。以这种方式,系统推荐并预先确定作为完全集成设备的治疗的一部分传输到眼睛的所有能量和流体流速。在实施例中,超声乳化机头由系统控制器调节以基于先前的激光手术优化超声乳化手术,该激光手术又是基于先前的白内障分级。该系统提供了单一的系统,其能够快速且不需要移动患者或系统的位置,确定角膜结构(例如,前表面和后表面)的形状和位置,眼睛的晶状体,例如前囊、后囊,对白内障的类型或密度进行分级,执
position)之间的某一角度定位。激光传输头可以伸出至患者以执行激光手术,并且如箭头620所示远离患者移动以进行超声手术。头枕612和患者支撑物613相对于飞秒激光超声乳化系统定位。该系统和患者支撑物具有定位系统,例如电磁定位系统,其确定激光系统相对于患者头枕并因此确定患者的角度630、角度630a或两者。所测量的角度是臂的纵向轴线631与患者(特别是患者的头部,如由头枕确定)的纵向轴线632之间的角度。
275.示出了外科医生的三个位置,上641和颞642、642。如可以看到的,无论外科医生对其位置的偏好如何,激光臂都不会干扰手术。
276.此外,激光头可以很容易地重新定位,以便在患者的双眼上触及并且执行激光手术,而无需重新定位患者支撑物或飞秒激光超声乳化系统的位置。
277.在实施例中,激光系统可以被定位成具有从约30度至约320度的角度以及该范围内的任何角度630。对该角度的唯一限制是患者支撑物所在的区域。除其他外,外科医生能够定位在上位或任一颞位。
278.实例24
279.转到图7,示出了这些可能的配置和外科医生位置中的几个,所有这些都提供了外科医生的完全触及。对于这些配置中的每一个,这种完全触及是对患者的任何一只眼睛。因此,激光超声系统610可以位于:45度角656、90度角(即颞)855、135度角654、180度角(即上)653、225度角852、270度角(即颞)851和315度角650。应当理解,激光超声系统可以位于图中所示位置之间的任何角度位置。因此,提供了全位置定位,例如,围绕患者每只眼睛的激光超声系统的“时钟”。以这种方式,系统可以说是非手性的,因为对于外科医生来说,左手和右手位置的系统配置是相同的。
280.实例25
281.图8是用于本发明系统的激光传输头的沙姆形状和位置确定组件的实施例。该实施例是5相机配置,其中相机5001、5002、5003、5004、5005间隔40度。这种布置允许系统以实例23和24的任何配置操作。即使在某些配置中并且对于某些患者,一个或两个相机可能会被挡住,系统仍将运行并为形状和位置确定提供可靠的图像。
282.实例26
283.图9是用于本发明系统的激光传输头的沙姆形状和位置确定组件的实施例。该实施例是6相机配置,其中相机6001、6002、6003、6004、6005、6006间隔40度。这种布置允许系统以实例23和24的任何配置操作。即使在某些配置中并且对于某些患者,一个或两个或三个相机可能会被挡住,系统仍将运行并为形状和位置确定提供可靠的图像。
284.实例27转向图10a和图10b,示出了具有对接系统的近端激光组件的不同角度的透视图。在图10b中,头部的盖子被移除,示出了沙姆相机,例如1001a。近端激光组件1000附接到臂1040的近端,臂是容纳治疗激光束路径和操作期间的激光束的光管。组件1000具有自动对接系统1010,其具有连接到对接环1020的驱动组件1011,该对接环对接至pid并形成pid的一部分。对接系统1010优选地由控制系统控制,并且可以由外科医生使用操纵杆全部或部分地操作。控制系统还控制对接系统的运行,并且可以具有负载传感器、速度控制以及安全和控制系统。
285.实例28
286.用于本发明系统和疗法的治疗激光束的实施例具有高质量的光束特性。激光束可具有1至约2.5、小于2、小于1.5和小于1.2的m2因子。
287.实例29
288.在本发明系统的实施例中,从飞秒激光到超声乳化的转换,包括激光器的脱对接、将激光臂移开、以及使超声乳化工具准备好插入(并且在实施例中还有将超声乳化工具插入眼睛)可能需要不到5min(分钟)、不到4min、3min和2min以及更小、约3-5min、约3-4min、约2-4min、和更长和更短的时间。
289.实例30
290.在实施例中,对于具有32英寸x22英寸占地面积的飞秒激光超声乳化系统,床的布置自由度允许设备定位在身高6'3”或更小的患者周围的任何位置。该系统提供了真正灵巧的系统。这种灵巧的系统为每只眼睛周围的激光提供全时钟,以及外科医生的颞位和上位接近。
291.实例31
292.各种实施例(例如实例的实施例)的激光系统相关部件被用于独立式激光系统中,该激光系统没有与其集成的超声乳化系统。
293.实例32
294.在这些设备的实施例中,占地面积,即由外部外壳形成的设备壳,是5平方英尺(22英寸
×
33英寸=726平方英寸/144=5平方英尺)。该设备的高度是57英寸到65英寸不等。激光臂及其光学器件头主要是水平运动。臂并不绕枢轴点旋转。在存储时,臂完全适配设备壳(即,22英寸x33英寸)。激光臂及其光学器件头在“x”方向的最大行程为33英寸,用于初始设置标称位置。一旦处于标称位置,运动平台可以在x上移动 /-2英寸,在y上移动 /-2英寸,在z上移动 5/-3英寸,用于相对于患者进行微调。(在本实例中,x是设备长轴,y是设备横轴,z是设备纵轴。)因此,在本实施例中,臂在x和y上移动,使得在存储时整个臂及其光学器件头装配在设备占地面积内。外壳不是可调节的,并且因此其宽度和横向尺寸不会改变。
295.实例33
296.转到图14,示出了飞秒激光超声乳化系统1400的实施例的透视图。图15、图15a、图15b、图16a、图16b、图16c、图17a、图17b、图17c示出了图14的系统的各种部件和配置。这些图中相同的数字表示相同的部件。
297.飞秒激光超声乳化系统1400具有形成系统1400的底座1403的外壳1401。在底座1403上方并附接到外壳1401的是运动机构外壳1402。外壳1402包含用于可伸出组件1409的水平移动(即,伸出和缩回)的机构。转换滑动台1410由水平运动机构1420伸出和缩回。转换滑动台1410支撑光学组件和扫描仪外壳1406。该外壳1406还包含竖直运动机构1425和竖直运动转换滑动台1411。
298.可伸出组件1409包括外壳1406、臂1407和激光束传输头1408,其中臂包含系统的各种光学路径以及控制电缆。激光束传送头1408包括形状和位置确定设备1412和pid 1470。
299.在图17中,系统1400被示出为具有一个监控器1413。该系统可以具有一个或两个附加监控器(如图16a至图16c所示)。该系统可以具有集成显微镜(这些图中未显示)。
300.在图15中,示出了可伸出组件1409,其附接到转换滑动台1410。台1410具有可伸
出/可缩回底座1424和柔性可伸出/可缩回盖1422。台1410提供组件1409的水平移动。台1410定位在外壳1402内并且部分地形成该外壳的顶表面。外壳1402附接到外壳1401。
301.转到图15a,以及图15,水平移动机构1420包含在外壳1402内。机构1420可以直接附接到外壳1402、外壳1401以及这些的组合和变体。外壳1402还包含卷轴1423,其保持(即,卷绕和展开)柔性盖1422。外壳1402还包含辊1421,柔性盖1422在该辊上移动。
302.图15a示出了移除盖1402的水平移动机构1420。机构1420具有马达、驱动机构、传感器和控制器。机构1420具有水平滑动机构1426,其是一对相互内嵌的滑轨。支撑物1428将内轨与竖直滑动机构1427连接,该滑动机构形成竖直运动机构1425的一部分(见图15)。图15b示出了处于第一伸出位置(进行激光操作的位置)图15a的导轨组件。
303.图16a是具有3个显示器的图14的系统1400的平面图。系统1400位于手术室或患者治疗室中。系统1400处于完全缩回(例如,停放)位置。在停放位置,可伸出组件1409不从底座1403伸出。因此,在该位置,可伸出组件1409不伸出超出(即,它完全在)系统的占地面积或壳1480之外。系统1400相对于患者床1490和人示出。
304.图16b示出了处于用于执行治疗激光操作的伸出位置(第一位置或第一伸出位置)的系统。尽管以与患者方向成90度角示出该系统,但应理解该系统可以相对于患者以任何角度定位。例如,该系统可以实例23和实例24的任何角度定位。可伸出组件1409水平伸出超出系统外壳以将激光头定位在患者上方。
305.图16c示出了处于完全伸出位置的用于执行激光治疗操作的系统。该系统以与患者的方向135度角度示出。完全伸出的位置使系统的外壳与患者保持足够远的距离,从而提供从业者适当、舒适并符合人体工程学的接近患者。可伸出组件1409水平伸出超出系统外壳以将激光头定位在患者上方。比较图16c与图16b,表明处于图16c的完全伸出位置的组件1409更长,即,相比在图16b的第一伸出位置,激光头离底座更远。
306.图17a-图17c是一系列照片,示出了图14的系统的可伸出组件在其伸出和缩回时的具体位置。图17a示出了用于激光系统的测试和校准的中性伸出位置。图17b示出了用于治疗激光操作的第一操作伸出位置。图17c示出了用于治疗激光操作的第二操作伸出位置(完全伸出)。
307.因此,该系统可以具有四个预定位置。停放位置,其中激光头和可扩展组件位于设备的占地面积内。只有激光头水平延伸超出设备占地面积的中性位置。可以对患者进行激光治疗活动的第一伸出位置。可以对患者进行激光治疗活动的第二或完全伸出位置。四个预定位置可以通过止挡件、基于机械的、基于控制软件的以及这些的组合和变体来控制。该系统还可以被配置成具有从中性至完全伸出的任何数量的其他伸出长度,或者预定的,或者单独由操作者确定,以及这些的组合和变体。
308.外壳包括电源部件、控制部件、操作部件、分析预测和诊断设备、位置确定和定位装备、激光束产生部件和超声产生部件。在优选的实施例中,超声产生部件是超声乳化系统的部件并且激光束产生部件提供具有约2ps和更短脉冲长度的激光束。
309.这些组件可以全部和部分地分布在两个外壳1401、1402之间,除了其他原因之外:以优化空间,从而避免组件之间的干扰,管理热量和振动,并提供系统1400的更有效的控制和操作。两个外壳1401、1402可以是独立的外壳,在同一个底座或框架上,它们之间可以具有通信、控制、电源、光学连接以及其他连接,它们可以是单独的同一外壳,它们可以细分或
划分成第三外壳或子外壳或第四外壳或子外壳等,以及它们的组合和变体。
310.连接器1505是连接外壳1401与外壳1406的光学导管。外壳1406包括扫描设备和用于治疗激光束的光束整形光学器件,该扫描设备、光学器件和两者也可用于监控和诊断激光束和光学路径。(外壳1406还包含竖直运动机构。)应当理解,在实施例中,外壳1406的这些组件可以全部或部分位于其他外壳之一中,并且同样地,来自其他外壳的部件可以位于外壳1406中。外壳1406可以被细分或划分成一个或多个外壳或子外壳,以及它们的组合和变体。在本发明优选的实施例中,外壳1406包括并隔离扫描仪和光束整形光学器件。可以包括在外壳1406中的扫描仪和光束整形光学器件或其他部件与系统1400的控制器和操作系统控制通信。设备可以彼此直接控制通信,或者它们可以彼此间接控制通信,例如通过与中央控制,例如系统1400控制器、监控器1413(其也可具有控制能力)通信,以及这些的组合和变体。这些设备也可以直接和间接地相互控制通信。
311.光学导管1405可以是光管(例如,具有内反射表面的空心管或通道,使得激光束通过空心管内的自由空间传输,空心管内的自由空间可以具有部分真空,具有环境空气,包含惰性气体,以及这些的组合和变体)、铰接式光管、伸缩式光管、柔性光管、光纤、一根或多根光纤、空心导管、光束导向器以及这些和其他激光束传输结构的组合和变体。
312.外壳1406附接到臂1407。臂1407和外壳1406通过移动机构1425在竖直方向上移动。臂1407具有用于确定眼睛以及眼睛内的结构的形状和位置的组件或设备1412。臂1407在其近端,即沿激光束路径最远的端部,并且因此离激光束源最远,并且在设备1412下方,具有患者接口设备(pid)1470。外壳1406具有监控器1413。监控器在例如铰接臂上可移动。监控器可以提供信息,例如手术、系统状况、激光状态、超声状态、白内障密度、超声设置、激光模式设置,并且可以接收外科医生的输入和指令。监控器与系统1400控制系统进行控制通信,监控器也可以包括系统1400控制系统的部分或全部。监控器与激光控制系统和超声控制系统直接、或通过系统1400控制系统、通过监控器1413以及它们的组合和变体进行控制通信。监控器及其铰接臂可以位于系统1400中的其他结构上或者可以是独立式的。可以使用一个、两个和额外的监控器。监控器可能具有3d观察或显示能力。
313.臂1407形成或包含激光束传输结构,例如为激光束的传输提供自由空间的空心管。在实施例中,臂1407可以包含在自由空间中的光束路径,或用于将激光束传输到例如扫描仪的光纤,该扫描仪位于管的近端而不是远端,即靠近的端外壳1406。臂1407也可以是或包括描述用作光学导管1405的类型的任何激光束传输结构。该管还可以包含光学器件。在图14的实施例中,臂1407包含非准直的激光束,并且因此臂1407可以被称为包含非准直的激光束和激光束路径,换言之,臂1407包含、包围或容纳沿激光束路径的“非准直空间”。臂1407可以容纳或包围准直空间,即激光束路径上的激光束被准直的空间。它可以容纳包含光学器件的空间。它可以容纳准直空间和非准直空间。实施例中的臂1407可以从远端点枢转、旋转、伸缩、铰接以及这些的组合和变体。臂1407中的激光束路径的近端包括镜子或光学器件,以将激光束引导通过pid并且到达并进入患者的眼睛。
314.实例33a
315.实例33的飞秒激光超声乳化系统具有手术显微镜1457。应当理解,本实例中描绘的手术显微镜可以与系统的其他实例以及本说明书中的系统的其他实施例一起使用。
316.实例34
317.在实施例中,激光系统具有外部冷却、内部冷却或这两者。
318.实例35
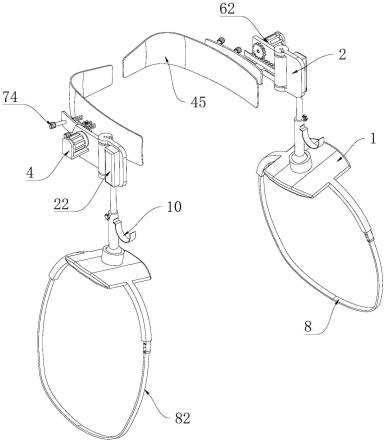
319.转向图12a至图12j,示出了pid(患者接口设备),其附接到任何本发明的激光超声系统并与它们一起使用,并且还用于与独立式激光系统一起使用。在图12a至图12j中,相同的数字对应于相同的结构。在本实例中并且如图12a至图12j所示,pid 1200的实施例具有以下部件:1201 pid臂1202 上窗口1204 接目镜;1204a 接目镜外裙部1204b 接目镜内裙部1205 上环1206 下环1207a 卡扣1207b 卡扣1207c 卡扣1208a 减震器1208b 减震器1208c 减震器1209 弯月面转换部件1210 储液环1211 上环侧壁1212 用于盐水填充的通道1213 真空口1220 附件块1221 臂1221a 臂的锁定位置1222 接收夹1223 接合球1224 槽(运动槽)1225 示出臂移动的箭头1226 示出块接合移动的箭头1250 眼1260 激光超声设备
320.该患者接口设备作为单个组件附接到眼睛。整个设备在附接到激光头后被定位并接合到眼睛表面。pid臂通过夹紧机构附接到激光系统。
321.在对接过程中,将pid臂的吸盘轻轻放置在角膜表面上,使得吸环与眼睛表面接触,然后启动真空以抑制眼睛的相对运动,从而稳定其相对于pid的位置,用于精确的激光治疗。
322.pid臂上的3个球形特征与夹紧机构上的运动槽特征接合。在定位接合期间,弹簧力由球施加在pid臂上。一旦pid就位,控制杆激活cam机构以将球加载到pid上并将运动支架锁定到位。
323.吸盘接口或“眼罩”覆盖眼睛的前表面并附接到眼睛。玻璃窗口界定了患者接口设备的第一平面。它是软件算法用于计算从照明或激光束发出的光的焦点的精确位置所使用的第一折射表面的位置参考。
324.3个卡扣固定窗口。3个包覆模制减震器将窗口推紧到卡扣底切处。pid臂的流体室设计有靠近窗户伸出的圆形壁。这允许流体弯月面在流体腔填充期间在与窗口接触之前反转。流体与窗口的适当接触,即从窗口的中心向外到外围,有助于防止气泡被补集在窗口下方,这可能会导致激光束的中断。
325.pid臂的流体腔伸出到储液环,来自腔的额外流体在该储液环中排出。这还可以作为屏障,防止腔室中的盐溶液(bss)接触患者皮肤,从而导致其通过毛细作用排出。
326.pid臂在其底部具有柔性附接环,其适用于与患者眼睛的前表面接口连接。附接环包括由硅制成的柔性环形外裙部和内裙部,其在固定眼罩时与眼睛表面接合。内裙部和外裙部描绘出用于真空连通通道的环形抽吸通道。
327.在设计的其他方面,pid臂在其侧面具有真空端口,其用于在环形抽吸通道中产生吸力并使眼罩接口能够整齐地附着在患者的眼睛上。第一个端口旁边的第二个端口连接到医疗级管道,以用盐溶液(bss)填充眼罩接口室。
328.实例35a
329.转到图13,示出了pid 1300的透视图。pid 1300具有pid臂1301、上部(远端)窗口1302和下部(近端)玻璃窗口1303,上部(远端)窗口可以是玻璃并且优选地对治疗激光具有高透射率,并且下部(近端)玻璃窗口可以是玻璃并且优选地对治疗激光具有高透射率。
330.实例36
331.转向图18和图19,分别示出了固定光光学组件和路径以及顺管而下(dtp),例如,沿着治疗激光束传输到眼睛的路径的一部分、光学组件和用于用相机观察眼睛的路径。在优选实施例中,大部分固定光路和dtp观察路径是重合的。
332.实例37
333.在实施例中,激光超声系统(例如,飞秒激光超声乳化系统)具有配置用于后囊切开术和对后晶状体囊进行激光操作的激光器。该系统还具有预定的超声乳化参数,其可以访问和使用并与激光操作集成并优化。该系统可以通过使用具有诸如图23a至图23d所示的屏幕的gui来具有基于菜单的控制系统。
334.实例38
335.用于激光、激光超声和飞秒激光超声乳化系统的患者定位设备系统可以具有独立的标记,其可以放置在身体、头枕或两者上,并且不需要视线进行连续跟踪。磁场由标记产生并输出位置和方向数据,而无需进行后期分析计算。以每个标记50hz的更新率提供准确、高质量的数据。添加标记(例如,每个系统四个)。该系统在表2中进一步描述
336.表2
337.实例39
338.激光、激光超声和飞秒激光超声乳化系统可以具有与系统集成的手术显微镜。显微镜可以附接到系统的外壳上,并且优选是集成到系统中。以这种方式,显微镜与系统控制系统(例如,飞秒激光超声乳化控制系统)进行信息、数据和控制通信。因此,例如,手术显微镜和系统被配置用于显微镜以接受来自治疗激光系统,并且特别是光学器件和数据系统的命令和视图(数字覆盖),这种通信在激光器(例如飞秒激光模式)中,在激光手术期间(例如飞秒激光手术期间),在超声乳化模式期间(例如,在超声乳化手术期间),在空闲、预热或观察模式(超声乳化、激光或两者都激活但未执行手术)期间,以及这些的组合期间发生。
339.在实施例中,手术显微镜由3d视觉系统代替或增强。3d观察系统可以是向外科医生或其他从业者或观察者显示眼睛结构(包括例如角膜、晶状体、pid接口和与眼睛的接触、iol,以及这些和其他结构和设备的组合和变体)的三维图像的任何系统。例如,3d观察系统可以是可穿戴的3d可附接辅助设备(例如beyeonics surgical设备)、3d监控器、基于监控
器和眼镜的系统、平视显示系统以及这些的组合和变体。3d观察系统可以3d记录过程并且可以将过程的远程3d图像实时提供到远程位置,例如激光系统所在处的不同位置。
340.实例40
341.激光、激光超声,例如飞秒激光超声乳化系统可以具有与系统相关联的“智能”脚踏开关。脚踏开关与系统控制系统集成在一起。脚踏开关可以根据系统的模式打开和关闭激光和超声乳化。脚踏开关可以与菜单系统、gui和语音命令集成,以允许脚踏开关用于选择程序,例如gui上的菜单驱动项目,例如图23a至图23d所示的菜单项目。脚踏开关还可以与口语和听力控制和菜单选择系统(例如“alexa”或其他类型的语音命令系统)集成。
342.脚踏开关可以是有线的,即具有将脚踏开关连接到激光超声乳化系统的控制电缆。优选地,脚踏开关是无线的并且与用于激光器、超声乳化、集成单元、这些中的一个或多个以及所有这些的控制系统进行控制通信。
343.通信总线可用于脚踏开关以及其他设备和系统。如图22a所示,总线在每一端终止,然后多个设备可以关闭它,而无需监控计算机。以这种方式,所有设备都可以相互传递信息(例如,以控制通信、信息通信和两者)。在优选实施例中,超声乳化和飞秒激光计算机都与脚踏开关在总线上。脚踏开关可以广播消息包,其可以由两个计算机(例如控制器)处理,用于激光系统和超声乳化系统。主飞秒激光计算机可以使用一些脚踏开关控制来发射激光或执行模式更改操作。超声乳化计算机可以同时使用其他脚踏开关控件来执行其他操作,例如控制超声乳化能量、冲洗或抽吸真空。
344.在实施例中,总线是广播型总线,例如canbus。
345.在实施例中,可以使用tcp/ip。然而,市售的脚踏开关通常不是基于tcp/ip的。也可以使用蓝牙或硬连线脚踏开关,但不太优选。
346.实例41
347.转向图20、图20a、图20b,示出了pid 2000的实施例。与更复杂的pid相比,pid具有四个部件,大大降低了组装成本和复杂性,并使清洁更容易。pid可以是单次使用的或可重复使用的。pid 2000具有集成式例如整体臂2001,其具有接合装置,例如夹子2010,用于附接到系统(例如,激光、激光超声、飞秒激光超声乳化等)。pid 2000还具有两个端口2007、2008,其可用于流体输送和真空。优选地,2008用于真空而2007用于输送bss。pid 2000具有窗口2002,其位于固定环2003中,并由夹子2004a、2004b、20004c固定就位。整体的环形真空环2005接合固定环2003的近端。环形真空环2005与端口2007和2008流体连通。环形真空环2005优选地是整体件。环形真空环2005被接合并保持柔性眼睛接合环2006,其与端口2007、2008中的一个或两个流体连通。
348.pid 200具有窗口支撑物和流体管理系统,其具有销2020a、2020b、2020c(它们优选地是集成的,即环2003的整体部分)。销在窗口的近端(下部)侧支撑窗口2002,而夹子2002a、2002b、2002c接合窗口2002的侧端和远端(顶部)。销钉窗口保持在两个流体通道、外部流体通道2021和内部通道2022上方。通道由环形突出部(例如环或脊2055)分离。在实施例中,高外部通道2021(以及因此环2055的高度)比销稍低,例如比销的顶部低约1mm、约0.7mm、约0.5mm。内部通道和外部通道用作流体储存系统,保持流体与窗口的底侧接触,同时允许气泡逸出并且多余的流体溢出到外部流体通道2021中。
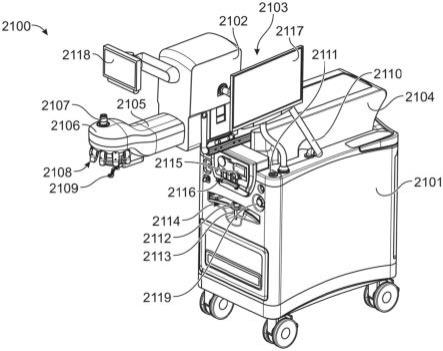
349.实例42
350.转向图21、图21a、图21b、图21c、图21d、图21e,示出了飞秒激光超声乳化激光系统2100的实施例的各种视图和部件。相似的数字指相似的结构。系统2100具有包含在共同外壳内的激光子系统和超声乳化子系统。激光子系统包括治疗激光束源,并且在实施例中包括慢脉冲持续时间和长脉冲持续时间治疗激光束源。激光子系统包括界定治疗激光束沿其行进的治疗激光束路径的激光器和沿激光束路径放置或定位的光学部件。这些部件将包括z方向聚焦光学器件和x-y扫描仪。
351.飞秒激光超声乳化系统2100具有第一外壳2101和光学组件和扫描仪外壳2102,其可移动地、机械地并且光学地与第一外壳2101相关联。外壳2101是提供水平运动的可伸出/可缩回组件2103的一部分。组件2103还包括底座2105,其与外壳2101机械地相关联,并且相对于外壳2101是不可移动的。
352.光学组件和扫描仪外壳2102具有臂2105,其容纳激光束路径和光学路径的部分,并因此提供激光束和光学图像的传输。与臂2105机械并且光学相关联的是激光传输和成像头2016。头2016的竖直运动由操纵杆2107控制(并且也可以单独进行或与控制系统结合进行,并且也可以通过gui进行)。可以通过本说明书中公开的各种设备中的任何一种来实现竖直运动。
353.头2016具有位置和确定设备2108和患者接口设备2109。
354.激光束可移动连接器设备,例如铰接式空心管2110,将用于外壳2101中的激光器的激光束传输到外壳2102中的光学器件和光束处理设备。
355.该系统具有开口2114,其用于保持并储存超声乳化托盘组件2112。超声乳化托盘组件具有框架2122,其保持支撑托盘2121和接合销2113。
356.系统2100具有两个开口2111(左侧)和2120(右侧)用于接收和保持销2113以及因此超声乳化托盘组件2122。以这种方式,系统2100是非手性的,因此它可以被配置成以相同的方式在左右两侧使用,并且托盘和托盘组件是非手性的,因为它可以用于系统的左侧和右侧。
357.系统2100具有超声乳化盒2115和用于连接超声乳化相关部件(例如,空气、vit、dia、控制电缆等)的端口2116。
358.系统2100具有两个监控器2117、2118,其优选地是显示信息和菜单并接受例如来自系统操作员的指令的输入的图形使用者接口(gui)。gui可以显示控制和信息菜单,例如图23a至图23d中所示的那些。
359.系统2100具有紧急停止件2119。
360.在该实例的实施例中,定位和确定设备2108具有5个或5个沙姆相机组件,例如2123、2124、2125、2126。头部2106具有激光传输开口2128。激光束路径和图像路径通过该开口。开口可以具有透明的窗口,可透射激光束和图像,它还可以具有帽、虹膜或其他关闭设备,该设备在不使用激光时(例如当设备于缩回位置时或在超声乳化系统不运行时)关闭窗口。
361.例如,pid 2109可以是实例41的pid。pid 2109通过pid锁定和接合设备2127连接到激光头2106,并且从而连接到激光系统2100。设备2127具有在锁定位置(如图21e所示)与解锁位置(如图21d所示)之间的可移动的锁定杆凸片2129。
362.臂2105容纳治疗激光束路径以及其他光学路径。在实施例中,臂2105还容纳或承
载用于成像和定位设备的控制和电力电缆以及对接组件(该图中未示出)。
363.系统2100具有用于激光子系统和超声乳化子系统的公共电源。公共电源为整个系统提供所有电源,从而消除了对辅助电源或电源的需要。这允许系统插入手术室中的单个电源内。
364.系统2100具有公共控制系统,其包括紧急停止按钮或开关2119。公共控制系统具有控制器操作控制软件或操作指令。在优选实施例中,公共控制系统与以下中的一个或多个并且优选地所有以下进行控制通信:激光子系统中的控制系统和控制器;超声乳化子系统中的控制系统和控制器;与操作者接口的控制通信;与紧急停止2119控制通信;以及与例如患者病历系统、会计系统以及这些配置的组合和变体网络通信。
365.在实施例中,对接系统(优选地具有操纵杆)以及成像和位置确定装置由激光子系统控制系统控制。在实施例中,它们可以全部或部分由公共控制系统直接控制。在实施例中,激光控制系统和超声控制系统是部分的,并且可以完全集成到单个公共控制系统中。因此,在实施例中,飞秒激光超声乳化系统中仅存在一个控制系统或单个控制系统。在该实例的实施例中,该系统使用实例40的总线通信系统,其也在22a中描绘。
366.实例43
367.转到图22a,示出了实例42的系统2100,其上添加了脚踏开关2130。脚踏开关通过无线通信线路2131与系统计算机,例如控制器和系统设备进行控制通信。
368.本实例的实施例使用实例40的总线通信系统,其也在图22a中描绘。
369.实例44
370.在实施例中,集成激光超声系统具有第一外壳、第二外壳、gui和用于光学连接第一外壳和第二外壳的装置。第二外壳与第一外壳可移动地关联。激光超声系统具有组件,该组件具有用于沿激光束传输路径提供治疗激光束的治疗激光器。该激光器具有治疗激光器控制系统。激光超声系统还具有用于提供治疗超声能量的超声乳化系统,并且该系统具有超声乳化系统控制系统。治疗激光器和超声乳化系统的至少一部分并且优选这两个系统全部位于第一外壳内;
371.该集成激光超声系统具有与治疗激光器控制系统、超声乳化系统和gui中的至少一个且优选全部控制通信的集成控制系统。
372.这种集成的激光超声系统还具有安全联锁,由此在超声乳化系统操作时防止激光系统发射治疗激光。安全联锁与集成控制系统和激光控制系统中的一个或多个控制通信。安全联锁装置还可以与超声乳化控制系统控制通信。
373.这种集成的激光超声系统还具光束整形并定向组件,其包括z聚焦件、扫描仪和透镜。光束整形并定向组件包含在第二外壳内。优选地,整个该组件包含在第二外壳内。
374.用于光学连接第一外壳和第二外壳的装置与治疗激光器和光束整形并定向组件光学通信。这种用于光学连接的装置可以是铰接的中空光管、光纤或本说明书中公开的用于传输激光能量的任何其他装置。
375.该集成激光超声系统还具有连接到第二外壳并与光束整形并定向组件光学通信的臂。臂具有远端和近端,其中远端邻近第二外壳,并且优选地机械附接,并且在实施例中与第二外壳成集成。该系统具有激光传输头,其与臂的近端相邻并且优选地附接到臂的近端。激光传输头具有位于激光束传输路径上的光学元件。该光学元件可以是例如镜子,其接
收并引导激光束沿着激光束传输路径穿过激光传输头中的开口。因此,例如,该光学元件可以将光束从水平至竖直转向90度。该光学元件还可以包括接收、成形和传输激光束的透镜。这些透镜可以在光学路径上的镜子之前或之后。
376.如优选地配置的,臂包含例如容纳激光束传输路径的一部分,特别是从光束整形并定向组件到激光头的那部分。以这种方式,臂将激光传输头置于与光束整形并定向组件光学通信中。
377.优选地,该系统具有用于确定眼睛结构的形状和位置的装置,其可以是沙姆组件、oct组件或两者。该装置优选地位于激光传输头中、激光传输头上或形成激光传输头的一部分。用于确定形状和位置的装置与集成控制系统、治疗激光器控制系统、超声乳化控制系统和所有这些系统中的一个或多个控制通信。优选地,该装置至少与集成控制系统、激光控制系统或两者通信。
378.该系统还被配置成以多个时钟角度或位置放置在患者周围。优选地,系统被配置成相对于患者位置以一定角度定位,其中该角度由该臂的经度轴线和患者轴线界定;其中该角度包括约45
°
、约90
°
、约135
°
和约180
°
的角度。
379.在该系统的实施例中,它具有以下一个或多个特征:它被配置成提供具有不同脉冲持续时间的两个治疗激光束;它具有虹膜登记系统;治疗激光器是飞秒激光器、皮秒激光器或这两者。
380.实例44a
381.实例44的系统具有与集成控制系统、治疗激光器控制系统和超声乳化控制系统中的一个或多个控制通信的脚踏开关。这些系统还可以被配置成提供具有不同脉冲持续时间的两个治疗激光束。
382.实例44b
383.实例44和实例44a的系统还可以具有集成控制系统、治疗激光器控制系统或具有多个预定激光传输模式的这两者。这些预定激光传输模式可以包含在一个或多个控制系统内,或者可以位于与一个或多个控制系统相关联并且可由控制系统可触及的存储器设备中。进一步地,该集成控制系统、超声乳化控制系统或这两者具有多个预定的超声乳化程序。这些预定的超声乳化手术将包括例如参数(例如功率)和手术类型(例如,chop),它们在本说明书的超声/超声乳化-通用部分中详述。
384.该系统还被配置成确定关于眼睛晶状体中的白内障的信息。激光头上的形状和位置确定设备可以提供数据,例如光学图像,以形成确定信息的基础。也可以使用单独的成像系统来提供该数据。一个或多个控制系统然后基于数据做出确定。该确定的信息例如并且优选地是白内障的等级。例如,这可以是三个等级之一或四个等级之一。
385.该系统被配置成推荐激光-超声组合疗法。该建议全部或部分基于有关白内障的确定信息。
386.激光-超声乳化组合疗法,优选双部分(two-component)疗法。因此,具有激光组件,其是多个预定激光传输模式中的至少一个;以及,具有多个预定的超声乳化生产器中的至少一个的超声乳化部件。
387.实例45
388.一种使用集成激光-超声乳化系统为白内障眼睛提供激光-超声乳化组合疗法的
方法。集成的激光超声乳化系统具有gui;用于沿激光束传输路径提供治疗激光束的治疗激光器,其具有治疗激光器控制系统;用于提供治疗超声能量的超声乳化系统,其具有超声乳化系统控制系统;与治疗激光器控制系统、超声乳化系统和gui控制通信的集成控制系统。
389.因此,该系统可用于确定和确定关于白内障晶状体中的白内障的信息。优选地,该确定的信息是白内障的等级。
390.因此,该系统可用于确定和确定激光-超声组合疗法。该激光-超声乳化组合疗法优选是双部分(two-component)疗法。因此,具有激光组件,其是多个预定激光传输模式中的至少一个;以及,具有多个预定的超声乳化生产器中的至少一个的超声乳化部件。
391.该系统可用于推荐和推荐基于确定的白内障信息而确定的激光-超声组合疗法。优选地,系统在gui上显示推荐的激光-超声乳化组合疗法;并且优选地,在gui上作为与推荐的激光-超声乳化组合疗法相关的菜单项。
392.然后可以指示系统,优选地是通过gui菜单,也可以通过语音或脚踏开关指示系统执行:推荐的组合疗法;仅组合疗法的两个组成部分之一;重新确定组合疗法的两个组成部分中的一个或两个;以及这些的组合和变体。系统执行这些指令。
393.然后可以指示该系统对患者眼睛的晶状体执行并执行确定和推荐的激光-超声组合疗法。因为这是两部分或多部分的疗法,所以考虑并可能要求一个或多个说明来执行该治疗的步骤。
394.实例46
395.通常,在使用本发明激光超声(例如,激光超声、飞秒激光超声乳化、集成系统)的实施例执行手术时,首先执行激光手术,重新配置系统,然后进行超声手术,然后执行超声乳化。因此,并且通常,在患者准备好之后,首先进行激光手术。这些激光手术可以包括囊切开术、晶状体破碎和角膜切口和手术,以及本说明书中讨论的和本领域技术人员已知的其他激光手术。然后通过将臂和激光头从患者身上移开,快速重新配置集成系统。因此,将系统从激光配置转变为超声配置,例如超声乳化配置,并且然后执行超声手术,例如超声乳化。以这种方式,对眼睛和晶状体材料进行超声乳化术,其中这些晶状体材料首先被来自同一系统(即集成系统)的激光切割或破碎。超声乳化手术完成后,将患者移开,将集成系统快速重新配置回激光配置。该系统可以在激光和超声乳化配置之间快速且重复地转换,即重新配置。
396.应当理解,虽然不是本发明优选的,但是该系统具有在已经执行超声手术例如超声乳化之后对同一患者、同一只或不同眼睛执行激光手术的能力。
397.除了前述实例并且为了推进这些实例,还提供了一种激光系统,具有:治疗激光系统,其具有外壳;患者位置确定系统;具有第一部件和第二部件;与治疗激光系统机械关联的第一部件;第二部件不与治疗激光系统相关联,由此第二部件独立于治疗激光系统并且由此相对于治疗激光系统是独立运动的;并且,其中第一部件、第二部件或这两者被配置成确定第二部件相对于第一部件的相对位置。
398.此外,提供了一种激光超声系统,具有:治疗激光系统;用于提供治疗超声能量的超声乳化系统;以及安全联锁,由此在超声乳化系统操作时防止激光系统发射激光。
399.更进一步,提供了一种激光超声系统,具有:治疗激光系统;用于提供治疗超声能量的超声乳化系统;以及,集成到系统中的显微镜。
400.此外,提供了一种激光超声系统,具有:治疗激光系统;用于提供治疗超声能量的超声乳化系统;以及,用于确定眼睛结构的形状、位置和两者的沙姆相机装置。
401.此外,提供了这些激光系统、激光超声系统、激光超声乳化系统、飞秒激光超声乳化系统、方法和设备,具有以下一个或多个特征:其中激光系统具有集成超声系统;其中超声系统包含在治疗激光外壳内;其中超声系统是超声乳化系统;具有激光安全联锁,由此在使用超声系统时不能发射激光;其中,治疗激光系统是飞秒激光系统;其中超声系统是超声乳化系统;其中患者位置确定系统具有选自由a/c电磁跟踪系统、电磁跟踪系统、陀螺仪、加速度计和磁力计组成的组的设备;其中患者位置确定系统具有选自由罗盘、激光位置确定设备、声波位置确定设备、rfid设备组成的组的设备;其中治疗激光系统具有从外壳伸出的臂;其中治疗激光系统具有从外壳伸出的臂并且在臂的近端具有激光传输头;其中确定的相对位置是在二维空间中;其中确定的相对位置是在三维空间中;其中患者确定系统具有至少95%的准确度;其中患者确定系统具有至少98%的准确度;其中患者确定系统具有至少99%的准确度;其中系统被配置成确定臂相对于患者纵向轴线的角度,并且至少部分地基于该角度来调整治疗激光束模式;其中该角度被确定在
±
5度的精度内;其中该角度被确定在
±
3度的精度内;其中该角度被确定在
±
2度的精度内;其中患者位置确定系统的第二部件包含在患者头枕中;其中治疗激光系统具有用于患者位置确定系统的第二部件的充电站;其中系统具有pid;其中pid具有弯月面转换部件;其中pid包括臂并且其中臂界定真空通道和盐水通道;其中系统具有界定四个光瞳的光学器件,并且其中激光束路径延伸通过光瞳中的两个;并且,其中在光瞳处是轭合远心光瞳。
402.还进一步,提供了一种激光超声系统,具有:组件,其具有:用于沿激光束路径提供治疗激光束的治疗激光器;用于提供治疗超声能量的超声乳化系统;连接到组件的臂;臂具有远端和近端,其中远端附接到组件;其中近端具有激光传输头;臂包含激光束传输路径的一部分;其中该组件相对于患者位置以一定角度定位,其中该角度由臂的经度轴线和患者轴线界定;并且,其中角度为30度至320度。
403.还进一步,提供了这些激光系统、激光超声系统、激光超声乳化系统、飞秒激光超声乳化系统、方法和设备,具有以下一个或多个特征:其中角度选自由45
°
、90
°
、135
°
、180
°
、225
°
、270
°
和315
°
组成的角度组;其中,臂被配置成围绕组件上的枢轴点弧形运动;其中,臂被配置成水平运动,由此臂从组件可伸出且可缩回至组件;其中,所述臂、激光头或两者被配置成竖直运动;其中臂内的激光束路径中的激光束是非准直的;其中臂内的激光束路径中的激光束位于光纤内;具有界定四个光瞳的光学器件,并且其中激光束路径延伸通过四个光瞳;其中在光瞳处是轭合远心光瞳;具有用于确定相对于组件的患者位置的装置;其中用于确定患者位置的装置具有第一部件和第二部件;其中第一部件与激光超声系统机械地关联;其中第二部件未附接到治疗激光系统,由此第二部件独立于治疗激光系统并且由此相对于治疗激光系统是独立运动的;并且,其中第一部件、第二部件或这两者被配置成确定第二部件相对于第一部件的相对位置;其中治疗激光超声系统具有用于患者位置确定系统的第二部件的充电站;其中激光系统与超声乳化系统是集成的;其中激光系统和超声乳化系统包含在外壳内;其中组件包含在外壳内;具有激光安全联锁,从而在超声乳化系统使用时不能发射激光;并且,其中治疗激光器是飞秒激光器。
404.更进一步,提供了一种激光超声系统,具有:用于沿激光束路径提供治疗激光束的
治疗激光器;用于提供治疗超声能量的超声乳化系统;以及具有界定四个光瞳的光学器件,并且其中激光束路径延伸通过至少两个光瞳。
405.此外,提供了这些激光系统、激光超声系统、激光超声乳化系统、飞秒激光超声乳化系统、方法和设备,具有以下一个或多个特征:其中在光瞳处是轭合远心光瞳;其中治疗激光器和超声乳化系统是集成的;其中治疗激光器和超声乳化系统包含在外壳内;具有激光安全联锁,由此在使用超声系统时不能发射激光;并且,其中治疗激光系统是飞秒激光系统。
406.此外,提供了一种激光超声系统,具有:用于提供第一治疗激光束和第二治疗激光束的装置;系统具有界定激光束路径的光学器件;第一激光束路径和第二激光束路径沿激光束路径行进;其中第一治疗激光束具有约1,000fs至约2000fs的脉冲宽度;系统具有用于用第一治疗激光束执行晶状体切割的激光束传输模式;其中第二治疗激光束具有约100fs至约500fs的脉冲宽度;系统具有用于用第二治疗激光束执行角膜切割的激光束传输模式;用于提供治疗超声能量的超声乳化系统。
407.更进一步,提供了这些激光系统、激光超声系统、激光超声乳化系统、飞秒激光超声乳化系统、方法和设备,具有以下一个或多个特征:其中第一激光束的波长为1030nm;其中第二激光束的波长为1030nm;其中第一激光束的波长为1030nm并且其中第二激光束的波长为1030nm;其中重复频率为320khz或更低。
408.更进一步,提供了这些激光系统、激光超声系统、激光超声乳化系统、飞秒激光超声乳化系统、方法和设备,具有以下一个或多个特征:具有沙姆相机设备;其中沙姆相机设备具有n个相机,其中至少n-1个相机在从30度到320度的任何患者角度内具有患者眼睛的遮挡视野;其中n是5;其中n是6;并且,其中相机具有至少40度的分离;。
409.还进一步,提供了一种激光超声系统,具有:用于向患者提供治疗激光束的第一配置;用于对患者进行超声乳化手术的第二配置;并且,其中从第一配置到第二配置的转换需要小于5分钟。
410.更进一步,提供了这些激光系统、激光超声系统、激光超声乳化系统、飞秒激光超声乳化系统、方法和设备,具有以下一个或多个特征:其中从激光到超声乳化的转换小于3分钟;其中从激光到超声乳化的转换小于2分钟;其中从激光到超声乳化的转换小于1分钟;其中从激光到超声乳化的转换小于45秒;其中从激光到超声乳化的转换为约30秒;其中从激光到超声乳化的转换为约1分钟至30秒。
411.更进一步,提供了这些激光系统、激光超声系统、激光超声乳化系统、飞秒激光超声乳化系统、方法和设备,具有以下一个或多个特征:其中从飞秒激光到超声乳化的转换小于3分钟;其中从飞秒激光到超声乳化的转换小于2分钟;其中从飞秒激光到超声乳化的转换时间小于1分钟;其中从飞秒激光到超声乳化的转换小于45秒;其中从飞秒激光到超声乳化的转换为约30秒;其中从飞秒激光到超声乳化的转换为约1分钟至30秒。
412.更进一步,提供了一种激光超声系统,具有:界定占地面积和体积的组件;该组件具有:治疗激光系统;以及用于提供治疗超声能量的超声乳化系统;并且,其中占地面积小于1,500平方英寸。
413.更进一步,提供了这些激光系统、激光超声系统、激光超声乳化系统、飞秒激光超声乳化系统、方法和设备,具有以下一个或多个特征:其中占地面积为约33英寸乘约22英
寸;其中占地面积为约35英寸或更小乘以约35英寸或更小;其中占地面积为约35英寸或更小乘以约22英寸或更小;其中占地面积为约400平方英寸至约800平方英寸;其中体积小于约40ft3;其中体积小于约35ft3;其中体积小于约30ft3;其中体积小于约25ft3;并且,其中体积小于约20ft3。
414.此外,提供了一种激光超声系统,具有:治疗激光系统;治疗激光系统,具有:具有近端的臂;连接到臂近端的激光头;以及用于操作治疗激光系统的电子设备;用于提供治疗超声能量的超声乳化系统,具有用于操作超声乳化系统的电子设备;以及,激光头,其与用于超声乳化系统的电子设备和用于治疗激光系统的电子设备电隔离。
415.还进一步,提供了一种激光系统,具有:用于提供治疗激光束的治疗激光束;以及,用于界定激光束路径的光学器件;其中激光束路径长于300mm;由此激光束模式沿着激光束路径传输,而没有激光束模式扩大。
416.此外,提供了激光系统,具有:用于提供治疗激光束的治疗激光束;以及,用于界定激光束路径的光学器件;其中激光束路径长于300mm;由此激光束模式沿着激光束路径传输,而没有波前误差。
417.此外,提供了激光系统,具有:用于提供治疗激光束的治疗激光束;以及,用于界定激光束路径的光学器件;其中激光束路径长于300mm;由此激光束模式沿着激光束路径传输,而没有析光差。
418.更进一步,提供了这些激光系统、激光超声系统、激光超声乳化系统、飞秒激光超声乳化系统、方法和设备,具有以下一个或多个特征:其中激光器是飞秒激光器,并且还具有集成的超声乳化系统。
419.此外,提供了这些激光系统、激光超声系统、激光超声乳化系统、飞秒激光超声乳化系统、方法和设备,具有以下一个或多个特征:具有虹膜定位设备。
420.此外,提供了这些激光系统、激光超声系统、激光超声乳化系统、飞秒激光超声乳化系统、方法和设备,具有以下一个或多个特征:其中,超声系统与激光系统之间的数据和信息交换;其中该信息具有白内障等级;其中来自激光系统的信息用于提供推荐的超声能量。
421.此外,提供了这些激光系统、激光超声系统、激光超声乳化系统、飞秒激光超声乳化系统、方法和设备,具有以下一个或多个特征:其中,超声系统与激光系统之间的数据和信息交换;并且其中该信息具有白内障等级。
422.此外,提供了这些激光系统、激光超声系统、激光超声乳化系统、飞秒激光超声乳化系统、方法和设备,具有以下一个或多个特征:具有oct成像设备。
423.此外,提供了这些激光系统、激光超声系统、激光超声乳化系统、飞秒激光超声乳化系统、方法和设备,具有以下一个或多个特征:其中系统具有占地面积大小;并且占地面积大小选自由小于35x小于35英寸、小于35x25英寸、约35x25英寸、约33x22英寸和约400平方英寸至约800平方英寸的尺寸组。
424.还进一步,提供了这些激光系统、激光超声系统、激光超声乳化系统、飞秒激光超声乳化系统、方法和设备,具有以下一个或多个特征:具有位于激光束路径中的激光头上的帽,由此当激光器不处于可操作配置中时光学部件受到保护。
425.进一步提供了使用这些激光系统、激光超声系统、激光超声乳化系统、飞秒激光超
声乳化系统中的任何一个来执行激光操作和超声乳化操作的方法。
426.还进一步,提供了这些激光系统、激光超声系统、激光超声乳化系统、飞秒激光超声乳化系统、方法和设备,具有以下一个或多个特征:其中手术显微镜附接在系统外壳上并且与控制系统进行数据通信、控制通信和这两者;其中手术显微镜与系统外壳是集成的;其中手术显微镜可以接受来自激光治疗系统(例如飞秒激光)或超声(例如超声乳化模式和手术)的命令、视图(例如数字叠加)。
427.此外,提供了这些激光系统、激光超声系统、激光超声乳化系统、飞秒激光超声乳化系统、方法和设备,具有以下一个或多个特征:其中三维(3-d)观察系统附接在系统外壳上并且与控制系统进行数据通信、控制通信和这两者;其中3-d观察系统与系统外壳是集成的;其中3-d系统可以接受来自激光治疗系统(例如飞秒激光)或超声(例如超声乳化模式和手术)的命令、视图(例如数字叠加)。标题和实施例
428.应当理解本说明书中标题的使用是为了清楚、参考的目的,而不是以任何方式进行限制。因此,标题下描述的工艺组合物和公开内容应结合本说明书的全部内容(包括各种实例)来阅读。本说明书中标题的使用不应限制本发明提供的保护范围。
429.注意,不需要提供或解决作为本发明的实施例主题或与实施例相关联的新颖和开创性过程、激光操作和激光模式、增强和改进的视力或其他有益特征和特性的基础的理论。然而,本说明书中提供了各种理论以进一步推进该领域的技术。本说明书中提出的理论,除非另有明确说明,否则绝不限定、限制或缩小所要求保护的发明的保护范围。这些理论很多不是利用本发明所必需或实践的。还应理解,本发明可能会导致新的和迄今为止未知的理论来解释本发明的方法、激光模式、激光操作、眼睛的功能、设备和系统的实施例的功能特征;并且这些后来发展起来的理论不应限制本发明的保护范围。
430.本说明书中提出的设备、系统、激光发射模式、活动和操作的各种实施例,除了图中和本说明书中公开的那些实施例外,还可与各种测量、诊断、手术和治疗激光系统一起使用,在其中使用或由其使用。本说明书中提出的设备、系统、激光发射模式、活动和操作的各种实施例可用于:未来可能开发的其他测量、诊断、手术和治疗系统:使用现有的测量、诊断、手术和治疗激光系统,其可以根据本说明书的教导进行部分修改;以及其他类型的测量、诊断、手术和治疗系统。此外,本说明书中提出的设备、系统、激光发射模式、活动和操作的各种实施例可以相互以不同的和各种组合使用。因此,例如,在本说明书的各个实施例中提供的配置可以相互使用。例如,按照本说明书的教导具有a、a'和b的实施例的组分和具有a”、c和d的实施例的组分可以以各种组合例如a、c、d和a、a”c和d等相互使用。因此,本发明的保护范围不应限于在特定实施例、实例或特定附图中的实施例中阐述的特定实施例、配置或布置。
431.本发明可以以不同于本文具体公开的那些的形式实施,而不背离它们的精神或基本特征。所描述的实施例在所有方面都被视为仅是说明性的而非限制性的。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。