1.本发明涉及铁件焊接技术领域,特别是一种铁附件生产用焊接定位装置。
背景技术:
2.铁附件是电力线路输变电用附件需要根据不同的使用要求而进行生产的非标准件产品,包括角钢横担、抬担、抱箍和拉线杆等产品,横担是电线杆顶部横向固定的角钢横担,上面有瓷瓶,是杆塔中重要的组成部分,用来安装绝缘子及金具,以支撑导线和避雷线,并使之按规定保持一定的安全距离,为了提高安装效率,一般会将绝缘子安装座固定焊接在角钢横担上。
3.现有的铁附件焊接通常是人工焊接时,焊接时首先会固定角钢横担的位置,然后对绝缘子安装座的位置进行调整,使其相互垂直,需要工作人员手持辅助件,将绝缘子安装座摆弄到合适的位置后,才能进行焊接,需要花费大量精力确保焊接精度,每焊接一次就需要对绝缘子安装座的位置进行一次定位调整,无法进行大批量的焊接工作,焊接效率低下。
技术实现要素:
4.本发明所要解决的技术问题是:固定角钢横担和绝缘子安装座的位置不方便,焊接效率低下。
5.为解决上述技术问题,本发明提供如下技术方案:一种铁附件生产用焊接定位装置,包括固定组件和夹持组件,所述固定组件包括底板、支撑杆、第一固定杆、卡板和活动板,所述底板上设置有支撑板,支撑板一侧固定连接支撑杆一端,支撑杆另一端固定连接第一固定杆,所述卡板横截面为直角,卡板底部固定连接活动板一端,活动板另一端穿过支撑板;所述夹持组件包括第一夹杆、第二夹杆、铰接轴和第一伸缩杆,所述第一夹杆和第二夹杆转动连接铰接轴底部,第一夹杆和第二夹杆一侧铰接连接第一伸缩杆两端。
6.作为本发明所述铁附件生产用焊接定位装置的一种优选方案,其中:还包括驱动组件,所述驱动组件包括固定块、固定管、第二伸缩杆、推板、驱动块、导气管和第一连接管,所述固定管两端固定连接固定块,固定块固定连接支撑板另一侧,固定管底部固定连接第二伸缩杆一端,第二伸缩杆另一端固定连接推板上表面,推板下表面固定连接驱动块,驱动块滑动连接活动板相对远离卡板一端,所述固定管顶部固定连接第一连接管一端,第一连接管另一端固定连接导气管一端,导气管另一端固定连接第一伸缩杆。
7.作为本发明所述铁附件生产用焊接定位装置的一种优选方案,其中:所述驱动块一侧设置有第一倾斜面,活动板上设置有通槽,通槽内壁滑动连接驱动块,通槽内壁对应第一倾斜面设置有第二倾斜面,第一倾斜面滑动连接第二倾斜面。
8.作为本发明所述铁附件生产用焊接定位装置的一种优选方案,其中:还包括调节组件,所述调节组件包括第一滑块、限位块、活动架和第三伸缩杆,所述支撑板上开设有滑槽,第一滑块滑动连接滑槽,第一滑块一侧固定连接限位块,并且导气管穿过第一滑块和限位块,所述活动架上设置有第一限位槽,第一限位槽内壁滑动连接限位块,活动架底部固定
连接第三伸缩杆顶端,第三伸缩杆底端固定连接底板。
9.作为本发明所述铁附件生产用焊接定位装置的一种优选方案,其中:所述调节组件还包括第二固定杆,第二限位槽和第二滑块,所述第二固定杆一端固定连接支撑板,所述第二固定杆另一端固定连接第二限位槽,第二限位槽内壁滑动连接第二滑块,第二滑块固定连接铰接轴顶部。
10.作为本发明所述铁附件生产用焊接定位装置的一种优选方案,其中:还包括控制组件,所述控制组件包括缸筒、第一活塞板、连接杆、第二活塞板和第二连接管,所述缸筒一端连通固定管,缸筒上设置有进气管,缸筒通过第二连接管连通第三伸缩杆,并且缸筒内壁滑动连接第一活塞板和第二活塞板,所述第一活塞板和第二活塞板之间通过连接杆固定连接。
11.作为本发明所述铁附件生产用焊接定位装置的一种优选方案,其中:所述缸筒相对远离固定管一端螺纹连接螺杆,螺杆一端固定连接手轮,螺杆另一端转动连接套筒,套筒固定连接第一活塞板。
12.作为本发明所述铁附件生产用焊接定位装置的一种优选方案,其中:所述连接杆的长度大于进气管与固定管之间的距离,并且所述连接杆的长度大于进气管与第二连接管之间的距离。
13.本发明的有益效果:夹持组件可以同时夹持多个绝缘子安装座,对多个绝缘子安装座的位置进行固定,而通过固定组件可以对角钢横担的位置进行固定,此时角钢横担和绝缘子安装座之间相互垂直,因此,本发明可同时对角钢横担和绝缘子安装座的位置进行固定,无需工作人员手持辅助件将绝缘子安装座摆弄到合适的位置,减少摆弄调整时间,有利于提高焊接效率,同时避免每焊接一次就需要进行一次的定位调整,有利于提高铁附件的焊接效率,进行大批量焊接时,可以确保焊接的质量。
附图说明
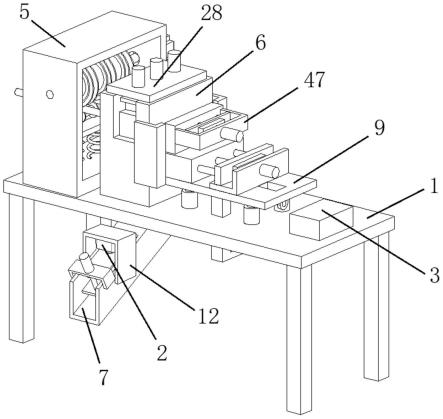
14.图1为本公开实施例中的整体结构示意图。
15.图2为本公开实施例中的夹持组件结构示意图。
16.图3为本公开实施例中的驱动组件结构示意图。
17.图4为本公开实施例中的驱动块和活动板结构示意图。
18.图5为本公开实施例中的活动架结构示意图。
19.图6为本公开实施例中的第一滑块和限位块结构示意图。
20.图7为本公开实施例中的控制组件第一工作位时的剖视图。
21.图8为本公开实施例中的控制组件第二工作位时的剖视图。
22.附图标记:固定组件100,夹固定组件100,底板101,支撑板101a,滑槽101b,支撑杆102,第一固定杆103,卡板104,活动板105,通槽105a,第二倾斜面105b,夹持组件200,第一夹杆201,第二夹杆202,铰接轴203,第一伸缩杆204,驱动组件300,固定块301,固定管302,第二伸缩杆303,推板304,驱动块305,第一倾斜面305a,导气管306,第一连接管307,调节组件400,第一滑块401,限位块402,活动架403,第一限位槽403a,第三伸缩杆404,第二固定杆405,第二限位槽406,第二滑块407,控制组件500,缸筒501,螺杆501a,手轮501b,筒501c,第一活塞板502,连接杆503,第二活塞板504,第二连接管505,进气管506。
具体实施方式
23.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合说明书附图对本发明的具体实施方式做详细的说明。
24.实施例1参照图1和图2,该实施例提供了一种铁附件生产用焊接定位装置,包括固定组件100和夹持组件200,固定组件100包括底板101、支撑杆102、第一固定杆103、卡板104和活动板105,底板101上设置有支撑板101a,支撑板101a一侧固定连接支撑杆102一端,支撑杆102另一端固定连接第一固定杆103,卡板104横截面为直角,卡板104底部固定连接活动板105一端,活动板105另一端穿过支撑板101a,第一固定杆103设置在卡板104水平方向的底面上。
25.支撑板101a与底板101固定连接,并且支撑板101a垂直于底板101设置,底板101能够对支撑板101a起到支撑固定作用;支撑杆102能够对第一固定杆103的位置起到固定作用,同时第一固定杆103的截面为方形,以便于第一固定杆103和卡板104配合卡紧角钢横担,活动板105穿过支撑板101a,并与支撑板101a滑动配合,活动板105从卡板104向支撑板101a的方向滑动时,活动板105能够带动卡板104移动,卡板104配合第一固定杆103卡紧角钢横担。
26.参照图2,夹持组件200包括第一夹杆201、第二夹杆202、铰接轴203和第一伸缩杆204,第一夹杆201和第二夹杆202转动连接铰接轴203底部,第一夹杆201和第二夹杆202一侧铰接连接第一伸缩杆204两端。
27.第一夹杆201和第二夹杆202能够围绕铰接轴203底部转动,第一伸缩杆204优选采用双头伸缩杆,其两端可以进行伸缩运动;当第一伸缩杆204神长时,第一夹杆201和第二夹杆202远离第一伸缩杆204一端能够夹紧绝缘子安装座;当第一伸缩杆204收缩时,第一夹杆201和第二夹杆202远离第一伸缩杆204一端能够松开绝缘子安装座;可以将一组以上夹持组件200等间距设置,这样夹持组件200可以同时夹持多个绝缘子安装座,对多个绝缘子安装座的位置进行固定,而通过固定组件100可以对角钢横担的位置进行固定,此时角钢横担和绝缘子安装座之间相互垂直,同时对角钢横担和绝缘子安装座的位置进行固定,无需工作人员手持辅助件,将绝缘子安装座摆弄到合适的位置,减少摆弄调整时间,有利于提高焊接效率,方便进行大批量的焊接操作。
28.实施例2参照图1至图8,该实施例基于上一个实施例,提供了一种驱动组件300。
29.参照图1至图4,还包括驱动组件300,驱动组件300包括固定块301、固定管302、第二伸缩杆303、推板304、驱动块305、导气管306和第一连接管307,固定管302两端固定连接固定块301,固定块301固定连接支撑板101a上与夹持组件200相对的一侧,固定管302底部固定连接第二伸缩杆303一端,第二伸缩杆303另一端固定连接推板304上表面,推板304下表面固定连接驱动块305,驱动块305滑动连接活动板105穿过支撑板101a的一端,固定管302顶部固定连接第一连接管307一端,第一连接管307另一端固定连接导气管306一端,导气管306另一端固定连接第一伸缩杆204。
30.通过固定块301能够将固定管302固定在支撑板101a上,并且固定块301将固定管302两端封闭;将固定管302内部泵入空气,固定管302中的空气会进入第二伸缩杆303,驱动
第二伸缩杆303进行伸长;当固定管302中的空气减少,气压下降时,第二伸缩杆303进行收缩;第二伸缩杆303进行伸缩运动时能够带动驱动块305移动,驱动块305通过与活动板105的滑动配合,能够带动活动板105滑动,当活动板105从卡板104向支撑板101a的方向滑动时,活动板105能够带动卡板104移动,卡板104配合第一固定杆103卡紧角钢横担。
31.将固定管302内部泵入空气的同时,固定管302中的空气会通过第一连接管307进入导气管306,然后进入第一伸缩杆204,此时第一伸缩杆204内部气压增大,第一伸缩杆204伸长,第一夹杆201和第二夹杆202远离第一伸缩杆204一端能够夹紧绝缘子安装座;当固定管302内部气压减少时,第一伸缩杆204中空气通过导气管306和第一连接管307进入固定管302中,第一伸缩杆204中气压减小,第一伸缩杆204收缩,第一夹杆201和第二夹杆202远离第一伸缩杆204一端松开绝缘子安装座。
32.参照3和图4,驱动块305一侧设置有第一倾斜面305a,活动板105上设置有通槽105a,通槽105a内壁滑动连接驱动块305,通槽105a内壁对应第一倾斜面305a设置有第二倾斜面105b,第一倾斜面305a滑动连接第二倾斜面105b。第二伸缩杆303进行伸长时,通过推板304带动驱动块305向下移动,在第一倾斜面305a滑动连接第二倾斜面105b的作用下,此时活动板105向右侧方向滑动时,活动板105能够带动卡板104移动,卡板104配合第一固定杆103卡紧角钢横担。当第二伸缩杆303收缩时,通过推板304带动驱动块305向上移动,此时驱动块305上的第一倾斜面305a不再对第二倾斜面105b施加压力,活动板105失去驱动力,卡板104松开角钢横担。
33.参照图1、图5和图6,还包括调节组件400,调节组件400包括第一滑块401、限位块402、活动架403和第三伸缩杆404,支撑板101a上开设有滑槽101b,第一滑块401滑动连接滑槽101b,第一滑块401一侧固定连接限位块402,并且导气管306穿过第一滑块401和限位块402,活动架403上设置有第一限位槽403a,第一限位槽403a内壁滑动连接限位块402,活动架403底部固定连接第三伸缩杆404顶端,第三伸缩杆404底端固定连接底板101。
34.第一滑块401设置有一个以上,第一滑块401能够在滑槽101b内壁滑动,限位块402能够带动第一滑块401移动;第三伸缩杆404伸缩时,带动活动架403移动,第一限位槽403a设置有一组以上,并且第一限位槽403a从下到上逐渐相互靠拢,限位块402对应第一限位槽403a设置,并且限位块402为圆柱状,便于限位块402在第一限位槽403a内部滑动;限位块402两端设置有固定环,防止限位块402滑出第一限位槽403a。
35.第三伸缩杆404缩短时,带动活动架403向下移动,第一限位槽403a带动各个限位块402移动,第一滑块401在滑槽101b中滑动,此时各个限位块402之间的距离减小,限位块402带动导气管306移动,导气管306带动对应的夹持组件200移动,各组夹持组件200之间的距离减小;第三伸缩杆404伸长时,带动活动架403向上移动,第一限位槽403a带动各个限位块402移动,第一滑块401在滑槽101b中滑动,此时各个限位块402之间的距离增大,限位块402带动导气管306移动,导气管306带动对应的夹持组件200移动,各组夹持组件200之间的距离增大,在对不同尺寸的角钢横担和绝缘子安装座焊接时,能够方便的调节绝缘子安装座之间的距离。
36.参照图1和图2,调节组件400还包括第二固定杆405,第二限位槽406和第二滑块407,第二固定杆405一端固定连接支撑板101a,第二固定杆405另一端固定连接第二限位槽406,第二限位槽406内壁滑动连接第二滑块407,第二滑块407固定连接铰接轴203顶部。
37.第二固定杆405能够对第二限位槽406起到固定作用,第二滑块407在第二限位槽406内壁滑动。当导气管306带动对应的夹持组件200移动时,夹持组件200上的铰接轴203带动第二滑块407在第二限位槽406内壁滑动,有利于提高夹持组件200移动时的稳定性。
38.参照图7和图8,还包括控制组件500,控制组件500包括缸筒501、第一活塞板502、连接杆503、第二活塞板504和第二连接管505,缸筒501一端连通固定管302,缸筒501上设置有进气管506,缸筒501通过第二连接管505连通第三伸缩杆404,并且缸筒501内壁滑动连接第一活塞板502和第二活塞板504,第一活塞板502和第二活塞板504之间通过连接杆503固定连接。
39.将现有的气泵与进气管506连接,通过进气管506往缸筒501中泵入空气时,缸筒501中的空气能够进入固定管302中;缸筒501中的空气通过第二连接管505也能进入第三伸缩杆404中,控制第三伸缩杆404进行伸缩运动。
40.缸筒501相对远离固定管302一端螺纹连接螺杆501a,螺杆501a一端固定连接手轮501b,螺杆501a另一端转动连接套筒501c,套筒501c固定连接第一活塞板502。通过转动手轮501b能够带动螺杆501a转动,在与缸筒501之间螺纹的作用下,螺杆501a通过套筒501c能够带动第一活塞板502、连接杆503和第二活塞板504在缸筒501内壁滑动。
41.连接杆503的长度大于进气管506与固定管302之间的距离,并且连接杆503的长度大于进气管506与第二连接管505之间的距离。
42.工作原理:通过转动手轮501b能够带动螺杆501a转动,在与缸筒501之间螺纹的作用下,螺杆501a通过套筒501c能够带动第一活塞板502、连接杆503和第二活塞板504在缸筒501内壁滑动,并将现有的气泵与进气管506连接,通过进气管506往缸筒501中泵入空气时,缸筒501中的空气能够进入固定管302中;缸筒501中的空气通过第二连接管505也能进入第三伸缩杆404中,控制第三伸缩杆404进行伸缩运动。
43.当第一活塞板502、连接杆503和第二活塞板504移动到图7中的位置,此时,通过进气管506往缸筒501中泵入空气,缸筒501中的空气通过第二连接管505进入第三伸缩杆404中,控制第三伸缩杆404进行伸缩运动,第三伸缩杆404伸长时,带动活动架403向上移动,第一限位槽403a带动各个限位块402移动,第一滑块401在滑槽101b中滑动,此时各个限位块402之间的距离增大,限位块402带动导气管306移动,导气管306带动对应的夹持组件200移动,各组夹持组件200之间的距离增大。
44.第三伸缩杆404缩短时,带动活动架403向下移动,第一限位槽403a带动各个限位块402移动,第一滑块401在滑槽101b中滑动,此时各个限位块402之间的距离减小,限位块402带动导气管306移动,导气管306带动对应的夹持组件200移动,各组夹持组件200之间的距离减小;先对夹持组件200之间的距离进行调节,在对不同尺寸的角钢横担和绝缘子安装座焊接时,方便的调节绝缘子安装座之间的距离。
45.当第一活塞板502、连接杆503和第二活塞板504移动到图8中的位置,此时,通过进气管506往缸筒501中泵入空气,固定管302中的空气会通过第一连接管307进入导气管306,然后进入第一伸缩杆204,此时第一伸缩杆204内部气压增大,第一伸缩杆204伸长,第一夹杆201和第二夹杆202远离第一伸缩杆204一端能够夹紧绝缘子安装座;同时固定管302中的空气会进入第二伸缩杆303,驱动第二伸缩杆303进行伸长,第二伸缩杆303通过推板304带动驱动块305向下移动,在第一倾斜面305a滑动连接第二倾斜面105b的作用下,此时活动板
105向右侧方向滑动时,活动板105能够带动卡板104移动,卡板104配合第一固定杆103卡紧角钢横担。
46.通过夹持组件200可以同时夹持多个绝缘子安装座,对多个绝缘子安装座的位置进行固定,而通过固定组件100可以对角钢横担的位置进行固定,此时角钢横担和绝缘子安装座之间相互垂直,因此,本装置可以同时对角钢横担和绝缘子安装座的位置进行固定,无需工作人员手持辅助件,将绝缘子安装座摆弄到合适的位置,减少摆弄调整时间,有利于提高焊接效率,同时避免每焊接一次就需要进行一次的定位调整,有利于提高铁附件的焊接效率,进行大批量焊接工作时,可以确保焊接的质量。
47.当固定管302内部气压减少时,第一伸缩杆204中空气通过导气管306和第一连接管307进入固定管302中,第一伸缩杆204中气压减小,第一伸缩杆204收缩,第一夹杆201和第二夹杆202远离第一伸缩杆204一端松开绝缘子安装座;此时第二伸缩杆303收缩,第二伸缩杆303通过推板304带动驱动块305向上移动,此时驱动块305上的第一倾斜面305a不再对第二倾斜面105b施加压力,活动板105失去驱动力,卡板104松开角钢横担,然后取出焊接好的角钢横担和绝缘子安装座,对下一组角钢横担和绝缘子安装座进行焊接。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。