1.本发明涉及一种减速器,尤其涉及一种用于谐波减速器的凸轮及谐波减速器。
背景技术:
2.谐波减速器是利用波发生器使柔轮产生可控的弹性变形与刚轮相啮合从而达到传递运动和动力的传动装置,在传动过程中,谐波减速器波发生器和齿轮磨损是造成减速器精度衰减的主要因素,而凸轮轮廓对于波发生器和轮齿的啮合状况影响最大,因此对波发生器凸轮轮廓进行合理设计是关键点;传统的凸轮轮廓设计,是基于空载条件下柔轮的变形,而不是基于实际负载工况下柔轮的变形,使得谐波减速器在实际工作中性能与空载性能相比结果较差,以及一段时间后会产生比较大的磨损,降低谐波减速器的寿命。
3.针对上述问题,目前尚未提出有效的解决方案。
技术实现要素:
4.现提出一种基于实际负载工况下柔轮的变形理论而设计的一种用于谐波减速器的凸轮及谐波减速器。
5.一方面,谐波减速器的凸轮,包括凸轮主体,所述凸轮主体的外轮廓线包括多个啮合区轮廓曲线和多个非啮合区轮廓曲线;所述啮合区轮廓曲线与所述非啮合区轮廓曲线交替相连共同构成所述凸轮主体的外轮廓线;所述啮合区轮廓曲线与所述非啮合区轮廓曲线在相交处相切;
6.每个所述啮合区轮廓曲线均包括第一曲线和第二曲线,所述第一曲线和所述第二曲线相连且在连接处相切;
7.所述第一曲线与所述第二曲线相连接的一端为第一曲线a端,另一端为第一曲线b端;所述第二曲线与所述第一曲线相连接的一端为第二曲线a端,另一端为第二曲线b端;所述第一曲线a端与所述第二曲线a端相比更加向外凸出,所述第二曲线b端与所述第一曲线b端相比更加向外凸出。
8.优选的,多个所述第一曲线在所述凸轮主体的外轮廓上均匀分布,多个所述第二曲线在所述凸轮主体的外轮廓上均匀分布。
9.优选的,所述啮合区有两个且关于中心对称分布,所述非啮合区有两个且关于所述凸轮的转动中心对称分布。
10.优选的,将所述外轮廓线置于极坐标系中,其中,一个所述啮合区的所述第一曲线和所述第二曲线的交点置于x轴上,所述凸轮主体的转动中心与极坐标原点o重合;
11.第一曲线的的方程式为:
12.ρ为极坐标半径;r为基圆半径;ω0和ω1为变形量系数;ξ为轮廓调整参数,-3<ξ<-1;φ为角度变量,0≤φ≤2π/9,π≤φ≤11π/9。
13.优选的,所述第二曲线的曲线的方程式为:
14.ρ=r ω0
×
cos2φ-ω1
×
cos4φ;
15.ρ为极坐标半径,r为基圆半径,ω0和ω1为变形量系数,φ为角度变量,
16.优选的,所述非啮合区轮廓曲线的方程式为:
17.ρ=r ω0
×
cos2φ;
18.其中,ρ为极坐标半径,r为基圆半径,ω0为变形量系数,φ为角度变量,
19.优选的,所述啮合区有三个,所述非啮合区有三个;所述啮合区和所述非啮合区交替分布在所述凸轮主体的外轮廓上。
20.优选的,相邻的所述第一曲线和所述非啮合区轮廓曲线为同一曲线。
21.优选的,将所述凸轮主体的转动中心与极坐标系的原点o重合,将其中一个啮合区的所述第一曲线和所述第二曲线的交点置于x轴上;
22.相邻的所述第一曲线和所述非啮合区轮廓曲线的曲线方程:
23.ρ=r0 ω0
×
cos3φ;ρ为极坐标半径,r0为基圆半径,ω0为变形量系数,φ为角度变量。
24.优选的,所述第二曲线的曲线的方程式为:
25.ρ=r0 ω0
×
cos3φ ω1
×3×
sin4φ-ω1
×4×
sin4φ^3;ρ为极坐标半径,r0为基圆半径,ω0和ω1为变形量系数,φ为角度变量。
26.另一方面本发明还提供了一种谐波减速器,包括刚轮、柔轮以及所述的一种用于谐波减速器的凸轮;所述柔轮套设在所述凸轮外轮廓面上,所述刚轮套设在所述柔轮的外周面上。
27.本发明通过在凸轮的啮合区轮廓曲线的顶点处将啮合区轮廓曲线分为第一曲线和第二曲线,通过使第一曲线a端更加凸出,第二曲线b端更加凸出;当凸轮朝向第一曲线的方向转动时,谐波减速器更加精确;当凸轮朝向第二曲线的方向转动时,谐波减速器能够承受更大承载力,受力更稳。
附图说明
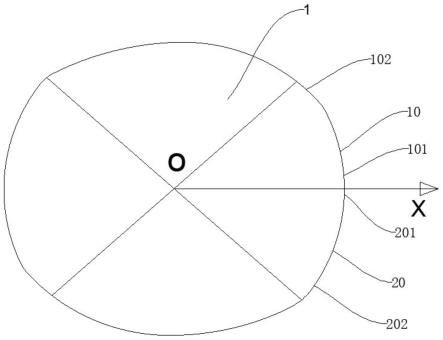
28.图1为本发明实施例双波凸轮示意图;
29.图2为本发明实施例三波凸轮示意图;
30.图3为本发明实施例双波凸轮、柔轮和刚轮相互关系示意图;
31.图4为本发明实施例双波凸轮和刚轮相互关系示意图;
32.图5为本发明实施例凸轮的啮合区第一曲线和第二曲线对比示意图;
33.图6为本发明实施例柔轮径向位移与柔轮轮齿载荷曲线图;
34.图7为本发明实施例谐波减速器剖视示意图。
35.此处所说明的附图用来提供对本发明的进一步理解,构成本技术的一部分,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。
36.在附图中:1-凸轮主体;2-刚轮;3-柔轮;10-第一曲线;20-第二曲线;101-第一曲线a端;102-第一曲线b端;201-第二曲线a端;202-第二曲线b端。
具体实施方式
37.为了使本技术领域的人员更好地理解本发明方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分的实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
38.需要说明的是,本发明的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序;“第一曲线a端”和“第一曲线b端”指的是第一曲线的相对两段区域,而非第一曲线两端的两个点,也即是,“第一曲线a端”和“第一曲线b端”分别指的是第一曲线的两段不同的曲线,该两段曲线共同构成了第一曲线;同样的,“第二曲线a端”和“第二曲线b端”指的是第二曲线的相对两段区域,而非第二曲线两端的两个点,也即是,“第二曲线a端”和“第二曲线b端”分别指的是第二曲线的两段不同的曲线,该两段曲线共同构成了第二曲线;第一曲线和第二曲线具体的长度由曲线的方程式以及角度变量决定。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本发明的实施例能够以除了在这里图示或描述的那些以外的顺序实施。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含。
39.本发明涉及一种减速器,尤其涉及一种用于谐波减速器的凸轮及谐波减速器;谐波减速器是利用波发生器使柔轮产生可控的弹性变形与刚轮相啮合从而达到传递运动和动力的传动装置,在传动过程中,谐波减速器波发生器和齿轮磨损是造成减速器精度衰减的主要因素,而凸轮轮廓对于波发生器和轮齿的啮合状况影响最大,因此对波发生器凸轮轮廓进行合理设计是关键点;传统的凸轮轮廓设计,是基于空载条件下柔轮的变形,而不是基于实际负载工况下柔轮的变形,使得谐波减速器在实际工作中性能与空载性能相比结果较差,以及一段时间后会产生比较大的磨损,降低谐波减速器的寿命。
40.针对上述问题,现提出一种基于实际负载工况下柔轮的变形理论而设计的一种用于谐波减速器的凸轮及谐波减速器。
41.以谐波减速器为例介绍本发明,如图1-7所示,一种谐波减速器包括刚轮2、柔轮3以及凸轮;所述柔轮3套设在所述凸轮外轮廓面上,所述刚轮2套设在所述柔轮3的外周面上。谐波减速器的凸轮包括凸轮主体1,所述凸轮主体1的外轮廓线包括多个啮合区轮廓曲线和多个非啮合区轮廓曲线;啮合区轮廓曲线与非啮合区轮廓曲线交替相连共同构成凸轮主体1的外轮廓线;啮合区轮廓曲线与非啮合区轮廓曲线在相交处相切;每个啮合区轮廓曲线均包括第一曲线10和第二曲线20,第一曲线10和第二曲线20相连且在连接处相切;第一曲线10与第二曲线20相连接的一端为第一曲线a端101,另一端为第一曲线b端102;第二曲线20与第一曲线10相连接的一端为第二曲线a端201,另一端为第二曲线b端202;如图6所示,第一曲线a端101与第二曲线a端201相比更加向外凸出,第二曲线b端202与第一曲线b端102相比更加向外凸出。当凸轮朝向第一曲线10一侧转动时,第二曲线20对应的部分柔轮3和刚轮2啮合作为主承载区,第一曲线10对应的部分柔轮3和刚轮2啮合作为副承载区,主承
载区的柔轮3和刚轮2啮合不受第二曲线20的影响,在第一曲线10的作用下副承载区的柔轮3与刚轮2之间间隙更小,柔轮3与刚轮2之间的配合更加精确;当凸轮朝向第二曲线20一侧转动时,第一曲线10对应的部分柔轮3和刚轮2啮合作为主承载区,第二曲线20对应的部分柔轮3和刚轮2啮合作为副承载区,主承载区的柔轮3和刚轮2啮合不受第一曲线10的影响,在第二曲线20的作用下,柔轮3与刚轮2的啮合齿数增加,柔轮3和刚轮2配合的最大负载增加,谐波减速器的负载能力增加。
42.如图5所示,凸轮外轮廓的啮合区第一曲线10和第二曲线20对比示意图,将第一曲线10和第二曲线20对折重叠后,第一曲线a端101相较于第二曲线a端201更加向外凸出,第二曲线b端202相较于第一曲线b端102更加向外凸出;
43.优选的,如图1-2所示,多个第一曲线10在凸轮主体1的外轮廓上均匀分布,多个第二曲线20在凸轮主体1的外轮廓上均匀分布;啮合区有两个且关于中心对称分布,非啮合区有两个且关于凸轮的转动中心对称分布。均匀分布,关于中心对称分布能够使柔轮3与刚轮2受力更加均衡,谐波减速器运转更加平稳,能够减少不必要的振动和噪音。
44.优选的,如图1所示,将外轮廓线置于极坐标系中,其中,一个啮合区的第一曲线10和第二曲线20的交点置于x轴上,凸轮主体1的转动中心与极坐标原点o重合;第一曲线10的的方程式为:ρ为极坐标半径;r为基圆半径;ω0和ω1为变形量系数;ξ为轮廓调整参数,-3<ξ<-1;φ为角度变量,0≤φ≤2π/9,π≤φ≤11π/9;第二曲线20的曲线的方程式为:ρ=r ω0
×
cos2φ-ω1
×
cos4φ;ρ为极坐标半径,r为基圆半径,ω0和ω1为变形量系数,φ为角度变量,通过上述公式,第一曲线10能够使凸轮挤压柔轮3时使柔轮3与刚轮2之间间隙较小的同时避免柔轮3变形过大导致柔轮3与凸轮摩擦增加,寿命降低;通过上述公式第二曲线20能够使凸轮挤压柔轮3时使柔轮3与刚轮2之间啮合的齿数较多同时避免柔轮3变形过大导致柔轮3与凸轮摩擦增加,寿命降低。
45.优选的,如图1所示,非啮合区轮廓曲线的方程式为:ρ=r ω0
×
cos2φ;其中,ρ为极坐标半径,r为基圆半径,ω0为变形量系数,φ为角度变量,通过上述公式,使得凸轮的啮合区和非啮合区光滑过渡,在保证凸轮自身刚度和结构强度的同时避免非啮合区与柔轮3接触,避免增加不必要的摩擦。
46.优选的,如图2所示,啮合区有三个,非啮合区有三个;啮合区和非啮合区交替分布在凸轮主体1的外轮廓上;相邻的第一曲线10和非啮合区轮廓曲线为同一曲线。该凸轮又称作三波凸轮,三波凸轮使柔轮3与刚轮2的齿数差为三的整数倍,而双波凸轮使柔轮3与刚轮2的齿数差为二的整数倍;三波凸轮使柔轮3和刚轮2的配合精度更高;非啮合区和第一曲线10为同一曲线在保证正常工作的前提下可以有效降低加工难度。
47.优选的,如图2所示,将凸轮主体1的转动中心与极坐标系的原点o重合,将其中一个啮合区的第一曲线10和第二曲线20的交点置于x轴上;相邻的第一曲线10和非啮合区轮廓曲线的曲线方程:
48.ρ=r0 ω0
×
cos3φ;ρ为极坐标半径,r0为基圆半径,ω
0为变形量系数,φ为角度变量;第二曲线20的曲线的方程式为:ρ=r0 ω0
×
cos3φ ω1
×3×
sin4φ-ω1
×4×
sin4φ^3;ρ为极坐标半径,r0为基圆半径,ω0和ω1为变形量系数,φ为角度变量;通过上述公式,三波凸轮的承载能力和传动精度都有了很大的提升。
49.根据试验可以得知,如图5-6所示,凸轮波发生器传动的柔轮3径向位移w和柔轮3齿上载荷ft试验曲线,其中,曲线l1、l2、l3分别为转矩在0、400、800nm下柔轮3的径向位移w变化情况;随着柔轮3轮齿的载荷逐渐变大,柔轮3的径向变形也越大,同时柔轮3的主承载区越向外更加凸出,凸出的部分越远离主承载区和副承载区的交接处;根据此特点对凸轮的外轮廓线进行重新设计,提高承载能力;曲线l4、l5、l6分别为转矩在0、400、800nm下,柔轮3轮齿上载荷ft的变化,随着柔轮3载荷逐渐变大,柔轮3的轮齿的载荷相应增加,且受到的最大载荷的柔轮3轮齿的位置越远离主承载区和副承载区的交接处,根据柔轮3此特性,增加柔轮3与刚轮2之间的啮合数量,有效提高谐波减速器的承载能力。
50.对于更多波峰的凸轮,只要其改进符合原理:凸轮在一个方向转动使柔轮与刚轮的啮合间隙更小,达到谐波减速器精度更高;凸轮在另一方向转动使柔轮和刚轮的啮合数量增加,达到谐波减速器能够承受的最大负载增加;均在本发明的保护范围。
51.本发明具有以下显著优点:
52.本发明通过在凸轮的啮合区轮廓曲线的顶点处将啮合区轮廓曲线分为第一曲线和第二曲线,通过使第一曲线a端相较于第二曲线a端更加凸出,第二曲线b端相较于第一曲线a端更加凸出;当凸轮朝向第一曲线的方向转动时,谐波减速器运转更加精确;当凸轮朝向第二曲线的方向转动时,谐波减速器运转能够承受更大承载力,受力更稳。
53.以上具体的示出和描述了本公开的示例性实施例。应可理解的是,本公开不限于这里描述的详细结构、设置方式或实现方式;相反,本公开意图涵盖包含在所附权利要求的精神和范围内的各种修改和等效设置。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。