1.本发明涉及机器人通信技术领域,尤其涉及一种具有远端通信功能的服务机 器人。
背景技术:
2.近年来,随着现代工业在细分领域的的迅猛发展,机器人、机械臂在各个领 域也发挥着越来越大的作用。随着科技发展,机器人的功能越来越强大,具有性 能稳定、效率高、精度高的特点,可以替代人工从事大量重复性的工作。人们对于机器人的智能化需求也越来越多,即要求机器人更加人性化、有趣好玩。目 前,机器人的人机交互需要用户通过鼠标、键盘、脱机程序等多种设备设定操作 指令,从而控制机器人完成用户的操作意图,该交互方式灵活性差,操作不人性 化,不能满足用户的需求。
技术实现要素:
3.本发明提供一种具有远端通信功能的服务机器人以解决现有技术中机器人 的人机交互方式灵活性差,操作不人性化,不能满足用户的需求的问题。
4.一种具备远端通信的服务机器人,包括本体和远程控制端,其中本体包括: 一个外壳,一个激光雷达,外壳周围装有超声波传感器;四个直流电机,各电机分 别连接一个麦克纳姆轮;所述外壳内部有一个微型工控机,用于接收和处理传感器的 数据、下发控制命令;一个底层控制板,用于控制直流电机;一个可升降的支架,上 面放置一块显示屏,显示屏上面集成了摄像头扬声器和麦克风;一个惯性测量单元 (imu)和一个里程计,用于机器人的位姿和速度估计。
5.优选地,所述远程控制端能够利用所述机器人的ip地址和无线网络可以和 机器人建立连接,然后通过远程控制端中的虚拟摇杆控制机器人的运动,并接收机 器人传来的影像,远程控制端还能够记录机器人运动的数据。
6.优选地,所述机器人具备导航功能,机器人能够根据提前建立好的全局地图和 所述远程控制端确定的终点位置和自身的位置自动的规划出一条无碰撞的最 优路径,然后沿着这条路径移动,在移动过程中,实时的运行着slam算法,即 时地定位,并且能够避开运动过程中遇到的障碍物。
7.优选地,所述机器人搭载了一台激光雷达,可以实现建图,并感知机器人周 围的环境,用于实时地避障。
8.优选地,所述激光雷达放置在保护外壳前上方,实时地检测购物车周围的障碍 物信息,并传送给微型工控机。
9.优选地,所述微型工控机放置在保护壳内部,接收各种传感器的数据,并运行 slam算法和路径规划算法,规划出路径并下发控制指令。
10.优选地,所述底层控制板上集成stm32系列芯片,接收微型工控机的控制命 令,然后输出pwm电平给直流电机,驱动直流电机转动。
11.与现有技术相比,该机器人可以实现远端视频通信,能够有效解决人机交互 灵活性差的问题,机器人配备了一块显示屏,并集成了扬声器和麦克风,在和远端 的手机建立连接之后,可以和远程的手机用户进行音视频通信,并可以在移动的 过程中实时地传输音视频数据。这种机器人同时具备遥操作,自主导航,视频通 信等功能,可以应用于远程视频会议,家庭服务等多种场合。
附图说明
12.下面结合附图对本发明的具体实施方式作进一步详细的说明。
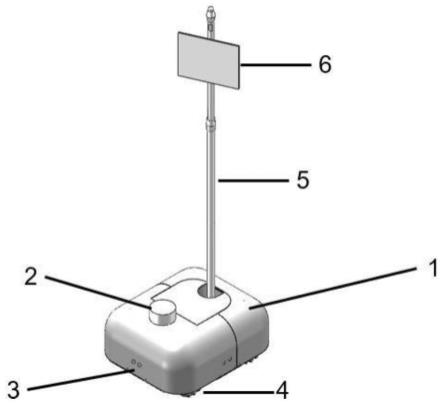
13.图1为本发明中一种具有远端通信功能的服务机器人涉及的本体结构示意 图;
14.其中:
15.底座外壳1,激光雷达2,超声波传感器3,麦克纳姆轮4,支架5,显示屏 6;
具体实施方式
16.为了使本发明的目的和优点更加清楚明白,下面结合实施例对本发明作进一 步描述;应当理解,此处所描述的具体实施例仅仅用于解释本发明,并不用于限 定本发明。
17.下面参照附图来描述本发明的优选实施方式。本领域技术人员应当理解的 是,这些实施方式仅仅用于解释本发明的技术原理,并非在限制本发明的保护范围。
18.本发明实施例涉及一种具有远端通信功能的服务机器人,所述机器人包括一 个外壳,一个激光雷达,外壳周围装有超声波传感器;四个直流电机,每个电机上 连上一个麦克纳姆轮;外壳内部有一个微型工控机,用于接收和处理传感器的数 据、下发控制命令,此外还有一个底层控制板,用于控制直流电机;一个可升降的 支架,上面放置一块显示屏,显示屏上面集成了摄像头扬声器和麦克风;一个惯性 测量单元(imu)和一个里程计,用于机器人的位姿和速度估计。
19.该机器人具备远程遥操作的功能,远程控制端app利用机器人的ip地址和 无线网络可以和机器人建立连接,然后通过app中的虚拟摇杆控制机器人的运 动,并接收机器人传来的影像,app端还可以记录机器人运动的数据,比如运动路 径和录像,然后可以进行数据的回放,使得机器人重新沿着原来的路径行驶。
20.自主该机器人具备导航功能,机器人可以根据提前建立好的全局地图、手机 app端确定的终点位置和自身的位置自动的规划出一条无碰撞的最优路径,然后沿 着这条路径移动,在移动过程中,实时的运行着slam算法,即时地定位,并且 能够避开运动过程中遇到的障碍物。
21.该机器人可以实现远端视频通信,机器人配备了一块显示屏,并集成了扬声 器和麦克风,在和远端的手机建立连接之后,可以和远程的手机用户进行音视频通 信,并可以在移动的过程中实时地传输音视频数据。
22.该机器人搭载了一台激光雷达,可以实现建图,并感知机器人周围的环境, 用于实时地避障。
23.激光雷达放置在保护外壳前上方,实时地检测购物车周围的障碍物信息,并 传送给微型工控机。
24.微型工控机放置在保护壳内部,接收各种传感器的数据,并运行slam算法 和路径
规划算法,规划出路径并下发控制指令。
25.底层控制板上集成stm32系列芯片,接收微型工控机的控制命令,然后输出 pwm电平给直流电机,驱动直流电机转动。
26.四个直流电机处于保护壳内部,每个直流电机上连接一个麦克纳姆轮,可以 使机器人拥有灵活的全向移动能力。
27.进一步地,所述远程控制端能够在无线网络连接上机器人,接着远程控制端接 收机器人摄像头传来的图像数据,并在屏幕上显示出来机器人前方的情况,操作 者可以通过远程控制端中的虚拟摇杆来控制机器人运动,同时远程控制端还可以 记录机器人的运动数据,包括路径和录像;此外还可以在远程控制端上进行数据 的回放,使得机器人按照记录的历史轨迹运行。
28.自主导航功能:机器人可以根据提前建立好的全局地图、远程控制端确定的终 点位置和自身的位置自动的规划出一条无碰撞的最优路径,然后沿着这条路径移 动,在移动过程中,实时的运行着slam算法,即时地定位,并且能够避开运动 过程中遇到的障碍物。
29.远端视频通信功能,机器人配备了一块显示屏,并集成了扬声器和麦克风, 可以和远程的手机用户进行音视频通信。
30.这种机器人同时具备遥操作,自主导航,视频通信等功能,可以应用于远程 视频会议,家庭服务等多种场合。
31.至此,已经结合附图所示的优选实施方式描述了本发明的技术方案,但是, 本领域技术人员容易理解的是,本发明的保护范围显然不局限于这些具体实施方式。 在不偏离本发明的原理的前提下,本领域技术人员可以对相关技术特征做出等同的 更改或替换,这些更改或替换之后的技术方案都将落入本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。