1.本公开针对一种用于在脊柱手术期间定位和重新定位患者的设备。更具体地,本公开涉及一种提供在冠状面中具有可调整性的可调整设备。
背景技术:
2.在脊柱手术中,外科医生进入脊柱前路以取出椎间盘和其他骨结构。取出的骨结构用在本领域称为椎间融合器的垫片代替。在一些情况下,可能有必要进入脊柱后路以安装螺钉和棒等固定硬件。由于在单路手术中需要进入脊柱两侧,所以患者通常处于侧卧位以进行前路手术。然后在设备上将患者重新定位为俯卧位,该设备允许腹部在减压状态下自由下垂。
3.患者的重新定位通常需要患者相对于支撑设备(例如手术台)移动。这样的重新定位需要护理人员付出相当大的力气,在不使手术复杂化的情况下移动患者。为了帮助患者从侧卧位转向俯卧位,开发了一种手术台,同时也将框架构件最小化,以方便两路手术的轻松进入。
4.然而,需要转动患者,以及与之相关的手术暂停,以及需要调整设备、线路和患者位置,这些都延长了患者的麻醉时间,并可能导致支撑结构出现问题。在让病人转身的过程中,还存在病人和护理人员的安全问题,尤其是块头较大的病人。
5.因此,需要以在任何重新定位期间,缩短手术时长以及减小对患者和护理人员造成伤害的风险的方式来支撑患者。然而,重要的是,在手术的各个环节中提供足够的稳定性的同时,患者可被重新定位,手术的各个环节包括进入髂嵴和下肋骨以进入下腰椎,在冠状面中调整以及当以侧卧位手术工作时提供反压力。解决所有这些问题对于提供可行的解决方案以及提供射线可透性以便在手术期间进行x光检查以确认假体安放正确并确认手术进展情况是非常重要的。
技术实现要素:
6.本公开包括所附权利要求中记载的一个或多个特征和/或以下特征,其可单独地或以任何组合构成可授予专利权的客体。
7.根据本公开的第一方面,患者定位系统包括第一患者定位器和第二患者定位器。第一患者定位器包括底座,该底座适合于被定位在患者支撑装置的一对横向间隔轨道上。第一患者定位器还包括可调整平台,该可调整平台在多个位置之间相对于底座可移动,以及一对侧约束,该一对侧约束在多个位置之间可定位在可调整平台上以接合患者躯干的相对侧边以及当其相对于底座移动时同可调整平台一起可移动。第一患者定位系统进一步包括患者支撑组件,该患者支撑组件配置为接合患者躯干的前面以在当患者以俯卧位定位在患者定位系统上时支撑患者,以及锁,该锁配置为相对底座选择性锁定可调整平台。
8.第二患者定位器包括底座,该底座适合于被定位在患者支撑装置的一对横向间隔轨道上。第二患者定位器还包括可调整平台,该可调整平台在多个位置之间相对于底座可
移动,以及一对侧约束,该一对侧约束在多个位置之间可定位在可调整平台上以接合患者躯干的相对侧边以及当其相对于底座移动时同可调整平台一起可移动。第二患者定位系统进一步包括患者支撑组件,该患者支撑组件配置为接合患者下肢的前面以在患者以俯卧位定位在患者定位系统上时支撑患者,以及锁,该锁配置为相对底座选择性锁定可调整平台。
9.在第一方面的一些实施例中,底座包括一对夹具,每个夹具配置为将底座固定到横向间隔轨道之一上。
10.在第一方面的一些实施例中,第一患者定位器的可调整平台和第二患者定位器的可调整平台均相对于相应的底座可转动。在一些实施例中,第一患者定位器的可调整平台和第二患者定位器的可调整平台均沿相应底座的纵向轴线可移动。
11.在第一方面的一些实施例中,第一患者定位器的可调整平台和第二患者定位器的可调整平台均沿相应底座的纵向轴线可移动。
12.在第一方面的一些实施例中,每个底座形成为包括由锁接合的多个孔,以相对于底座固定相应的可调整平台。在第一方面的一些实施例中,第一患者定位器的可调整平台和第二患者定位器的可调整平台均形成为包括由锁接合的多个通孔,以便锁通过可调整底座并容纳在相应底座的通孔中,所述锁与相应的可调整平台和底座的通孔接合,以固定可调整平台,防止相对于底座移动。在一些实施例中,侧约束均包括底座,该底座被调整大小以定位到相应的可调整平台的通孔之一中,以将侧约束固定到可调整平台。
13.在第一方面的一些实施例中,第一患者定位器的可调整平台和第二患者定位器的可调整平台均形成为包括多个通孔,且其中侧约束中的每一个均包括底座,该底座被调整大小以定位到相应的可调整平台的通孔之一中,以将侧约束固定到可调整平台。
14.在第一方面的一些实施例中,每个患者支撑组件包括多个患者支撑,每个患者支撑包括底座,该底座配置为接合可调整平台以将患者支撑固定到可调整平台,且其中每个患者支撑包括支撑在底座上的缓冲垫,该缓冲垫配置为接合患者的身体。在一些实施例中,至少一个患者支撑的缓冲垫是可调整的,以改变患者支撑的高度和改变患者相对于可移动平台的位置。在一些实施例中,第一患者定位器的可调整平台和第二患者定位器的可调整平台均形成为包括多个通孔,且其中每个患者支撑的底座包括凸起,该凸起配置为容纳在可调整平台的通孔之一中,以将患者支撑固定到可调整平台。
15.在第一方面的一些实施例中,患者定位系统的部件基本上是射线可透过的。
16.在第一方面的一些实施例中,第一患者定位器和第二患者定位器是可调整的,以在当患者以俯卧位定位在患者定位系统上时在冠状面中协作地调整患者脊柱。在一些实施例中,第一患者定位器和第二患者定位器配置为接合横向间隔轨道以可选择性移动来改变第一患者定位器和第二患者定位器之间的距离。
17.根据本公开的第二方面,一种用于在患者定位系统上重新定位患者的方法,患者定位系统包括第一患者定位器和第二患者定位器,患者定位器中的每一个均包括底板、相对于底板可移动的可调整平台、支撑在可调整平台上的支撑组件、定位在可调整平台上的侧约束组件以及相对于底板可操作地选择性锁定可调整平台的位置锁。该方法包括步骤:将第一患者定位器和第二患者定位器定位到患者支撑装置上;将患者以俯卧位定位到第一患者定位器和第二患者定位器上,第一患者定位器支撑患者躯干的一部分,以及第二患者定位器支撑患者下肢的一部分。该方法进一步包括步骤:定位第一患者定位器的侧约束组
件以接合患者躯干的侧边,以固定患者躯干防止其相对于第一患者定位器横向移动;以及定位第二患者定位器的侧约束组件以接合患者下肢的侧边,以固定患者下肢防止其相对于第二患者定位器横向移动。该方法更进一步包括步骤:将第一患者定位器和第二患者定位器中之一的可调整平台调整到相对于相应底板的第一位置以及接合相应的第一患者定位器或第二患者定位器的位置锁以相对于相应的第一患者定位器或第二患者定位器在第一位置稳定患者;以及将第一患者定位器和第二患者定位器中的另一个的可调整平台调整到相对于相应底板的第一位置以在冠状面中调整患者脊柱。该方法更进一步包括步骤:接合第一患者定位器和第二患者定位器中的另一个的位置锁以在在冠状面中调整患者脊柱的位置固定相应的第一患者定位器或第二患者定位器。
18.在一些实施例中,第二方面的方法进一步包括步骤:调整支撑组件之一的一部分的高度以在矢状面中调整患者脊柱的一部分。
19.在一些实施例中,第二方面的方法进一步包括步骤:释放第一患者定位器和第二患者定位器之一的位置锁;将释放的第一患者定位器或释放的第二患者定位器的可调整平台移动到新位置以重新调整患者脊柱在冠状面中的位置;重新接合释放的第一患者定位器或释放的第二患者定位器的位置锁以在新位置固定第一患者定位器或第二患者定位器。
20.在一些实施例中,调整第一患者定位器和第二患者定位器之一的可调整平台的位置的步骤包括绕可调整平台的转动轴转动可调整平台,以及相对于底板直线移动相应可调整平台的转动轴。
21.在一些实施例中,接合第一患者定位器和第二患者定位器中之一的位置锁的步骤包括将形成在相应可调整平台中的多个通孔之一与形成在底板中的多个孔之一对齐,以及将位置锁经过可调整平台的对齐的通孔定位到底板的对齐的孔中,以使位置锁同时接合可调整平台和底板以防止在其间移动。
22.在一些实施例中,定位第一患者定位器和第二患者定位器之一的侧约束组件的步骤包括在可调整平台的通孔之一中定位侧约束组件的一部分。
23.在一些实施例中,调整支撑组件之一的一部分的高度以在矢状面中调整患者脊柱的一部分的步骤包括对支撑组件该部分的一部分充气,以改变支撑组件该部分的高度。
24.根据本公开的第三方面,患者定位器包括底板、相对于底板可移动的可调整平台、支撑在可调整平台上的支撑组件、定位在可调整平台上的侧约束组件以及相对于底板可操作地选择性锁定可调整平台的位置锁。
25.在第三方面的一些实施例中,支撑组件包括多个可调整患者支撑,患者支撑相对于可调整平台可调整到多个位置。在一些实施例中,可调整患者支撑是可充气的,以改变可调整患者支撑的高度。
26.在第三方面的一些实施例中,可调整平台形成为包括多个通孔,通孔配置为容纳侧约束组件、患者支撑组件和位置锁的部分,以允许侧约束组件、患者支撑组件和位置锁中的每一个相对于可调整平台定位到多个位置。
27.在第三方面的一些实施例中,可调整平台绕其枢轴相对于底板可移动。在一些实施例中,可调整平台沿在底板中形成的直线导轨相对于底板可移动。
28.在第三方面的一些实施例中,底板形成为包括多个孔,多个孔配置为与可调整平台中的通孔对齐,以及当底座中的孔与可调整平台中的通孔对齐时,位置锁可经过可调整
平台的通孔定位到底板的孔中,以便位置锁同时接合可调整平台和底板以防止在其间移动。
29.在第三方面的一些实施例中,患者定位器的部件中的每一个基本上都是射线可透过的。
30.单独的或与其他任何一个或多个特征(诸如上文列举的和/或权利要求中列举的特征等)结合的附加特征可包括可授予专利权的客体,对于本领域技术人员而言,考虑到对各种实施例的具体说明以例示目前视为实施这些实施例的最佳模式后,这些附加特征将显而易见。
附图说明
31.具体而言,附图的具体说明参考以下附图,其中:
32.图1为患者支撑装置的立体图,其体现为双柱脊柱手术台,具有根据本公开的患者定位系统,该患者定位系统支撑在患者支撑装置的平行轨道上;
33.图2为类似于图1的视图,其中患者被支撑在患者定位系统上;
34.图3为类似于图2的视图,其中使用患者定位系统重新定位患者下肢以调整患者脊柱在冠状面中的方位;
35.图4为图1的患者定位系统的分解组装视图;
36.图5为从患者支撑装置的轨道下方获取的去掉一部分后的患者定位系统的透视图,图5的视图示出了第一患者定位器和第二患者定位器,第一患者定位器配置为支撑位于右边的患者躯干,第二患者定位器配置为支撑位于左边的患者下肢。
37.图6为图5去掉一部分后的第二定位器的立体图,第二定位器被调整到第二位置;
38.图7为第一患者定位器和第二患者定位器的其中之一的底板的夹持结构的分解组装视图;
39.图8为第一患者定位器和第二患者定位器两者共有底板的俯视图;
40.图9为图7和图8的底板的底部立体图,夹持结构位于闭合位置;
41.图10为沿着患者支撑装置的轨道的长度观察的患者定位系统的平面图;以及
42.图11为图9的一部分的放大图。
具体实施方式
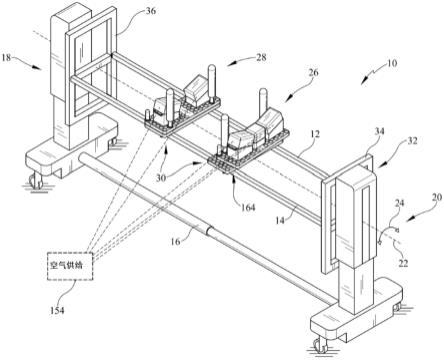
43.根据本公开,患者支撑装置10体现为脊柱手术台,其包括由柱18和柱20支撑的支撑结构32。支撑结构32包括第一支撑架34和第二支撑架36,第一支撑架34和第二支撑架36支撑在其间延伸的一对射线可透过的轨道12和轨道14。柱18和柱20还通过底轨16连接。支撑结构32可枢转地联接到柱18和柱20,使得支撑结构32绕纵向轴线22 可转动,如箭头24所示。脊柱手术台10的结构在本领域是典型的,其可以体现为患者支撑装置10,该患者支撑装置10在2016年11月22日授权的专利号为9,498,397,专利名称为“双柱手术支撑系统”的美国专利中公开,其通过引用结合在本文中以公开根据本公开的患者支撑装置10。
44.图1示出了支撑患者定位系统30的患者支撑装置10,支撑患者定位系统30的适合于以俯卧位支撑患者躯干的第一患者定位器26位于与适合于以俯卧位支撑患者臀部的第二患者定位器28纵向间隔开的位置。尽管患者定位系统30可定位在患者支撑装置10 的轨
道12和轨道14上,但患者定位系统30可与任何患者支撑装置10一起使用,该任何患者支撑装置10适合脊柱手术并提供从臀部到躯干稳定支撑轨道上患者的一对轨道,从而为侧卧位和俯卧位手术进入脊柱提供足够的可能。虽然将具体描述患者定位系统30 的本实施例,然而,应当理解的是,通过该系统30实现的移动也可以使用其他实施例和实施方式实现,以提供在患者38的冠状面、矢状面和轴面中在手术期间允许调整患者脊柱的患者定位系统。
45.现参照图2和图3,如图所示,患者以俯卧位定位在患者定位系统30上。值得注意的是,为简单起见,省去了支撑患者头部、胳膊和腿部所必需的支撑和结构。本领域普通技术人员会认识到,在脊柱手术期间支撑患者所必需的额外的支撑和装备将作为患者定位系统30的补充。尽管在图2中患者38以中正的俯卧位示出,但在图3中患者38已被重新定位,使得患者38的下肢40相对于患者38的躯干42在冠状面转动,同时使患者38保持大致俯卧位。而下面将进一步具体描述患者定位器26和患者定位器28中的每一个的具体结构,定位器26和定位器28的结构将允许在三种平面中调整患者以矫正患者脊柱的变形和允许进入更困难的区域,比如患者的下腰椎区域。患者定位器26和患者定位器28是可调整的,以适应地以俯卧位和侧卧位两种体位来改变患者解剖。当患者 38处于俯卧位以允许在矢状面和轴面调整患者38的脊柱时,这要求调整患者定位器26 和患者定位器28的部分的高度的能力,或者当患者支撑装置10达到移动极限时,这要求增加患者38倾斜度的能力。本领域技术人员应当理解的是,下面对患者定位器26和患者定位器28的结构和特征的论述将允许在手术期间通过护理人员的简单调整而稳固调整患者的位置。
46.现参照图4,在分解图中示出了患者定位器26和患者定位器28,患者定位器26和患者定位器28均具有五个关键元件,包括底板44、可调整平台46、相应的支撑组件130 和支撑组件132、侧约束组件50以及位置锁52。尽管根据定位器26和定位器28相对于患者38身体的位置在支撑组件130设置和支撑组件132的设置之间存在一些潜在的可变性,但是定位器26的操作和定位器28的操作是类似的,并且下面的论述将集中于定位器26以说明定位器26和定位器28两者的操作。
47.通过分别接合轨道12和轨道14的一对夹具54和夹具56,将底板44固定到轨道12 和轨道14上。一旦夹具54和夹具56闭合,则夹具54和夹具56用足够的力将底板44 固定到轨道12和轨道14上以防止正常情况下底板44相对于轨道12和轨道14移动。现参照图7,夹具54和夹具56均包括夹具底座58,其从底板44的下表面158延伸。夹具底座58包括配置为容纳枢轴销64的一对枢轴支架60和枢轴支架62,夹具臂66绕枢轴销64枢转以接合轨道12和轨道14的相应的底面68和底面70(见图6)。夹具臂66包括一对钥匙孔容纳器72和钥匙孔容纳器74,当夹具臂66被移动到例如如图9-11所示的闭合位置时,钥匙孔容纳器72和钥匙孔容纳器74接合夹具抓手80的挂钉76和挂钉78。
48.为了将底板44固定到轨道12和轨道14上,夹具臂66绕枢轴销64枢转以使钥匙孔容纳器72和钥匙孔容纳器74覆盖在挂钉76和挂钉78上。挂钉76和挂钉78均包括相应的帽82和帽84,夹具臂66可沿枢轴销64平移以使钥匙孔容纳器72和钥匙孔容纳器 74中的每一个的狭窄区域86接合挂钉76和挂钉78,以便帽82和帽84均接合夹具臂 66的表面88。由于钥匙孔容纳器72和钥匙孔容纳器74的狭窄区域86接合挂钉76和挂钉78,因而其之间的摩擦使得夹具臂66通过过盈配合被固定到挂钉76和挂钉78。在一些实施例中,夹具底座58是柔软有弹性的,容纳器72和容纳器74接合挂钉76和挂钉 78的力使得夹具底座58偏斜,以便夹具底座
58和夹具抓手80接合相应的轨道12和轨道14的边以产生将夹具54和夹具56固定到相应的轨道12和轨道14上的摩擦接合。这就防止外科手术期间底板44相对轨道12和轨道14滑动。
49.参照图7,夹具抓手80和夹具抓手80中的每一个与侧肋90和侧肋92接合,以便夹具抓手80和夹具抓手80与侧肋90和侧肋92合作来提供底板44的加强结构94。底板44还形成为包括充当圆柱形枢轴杆98(如图4所示)的导轨纵向通道96,圆柱形枢轴杆98延伸穿过通道96并通过过盈配合定位在在可调整平台46的底部表面100中形成的盲孔(未示出)中。在一些实施例中,可以通过粘合、超声波焊接或类似的接合方法,将枢轴杆98固定到可调整平台46的底部。在更多其他实施例中,枢轴杆98可包括与可调整平台46的底部表面100的孔中的内螺纹接合的外螺纹。枢轴杆98形成为包括防止可调整平台46相对于底板44抬升的帽结构102。然而,枢轴杆98允许可调整平台46 沿纵向通道96移动,并且枢轴杆98便于可调整平台46绕枢轴杆98的轴线170相对于底板44枢转,下面将进一步详细描述。
50.参照图4-6,可调整平台46可定位在底板44上,以便可调整平台46的下表面100 与底板44的上表面106接触。可调整平台46和底板44由如abs或另一碳纤维增强聚合物等的射线可透过的材料构成,使得表面100和表面106之间界面的摩擦系数相对较低,且可调整平台46会相对于底板44自由移动。可调整平台46相对于底板44的移动受枢轴杆98在通道96中的移动约束。
51.为了相对于底板44固定可调整平台46,将位置锁52定位以同时接合可调整平台46 和底板44。位置锁52与枢轴杆98相结合的动作阻止了可调整平台46相对于底板44的移动。如图6所示,底板44和可调整平台46均形成为包括多个相应的通孔108和通孔 110,这些通孔穿过底板44和可调整平台46。底板44和可调整平台46中的每一个的通孔108和通孔110的样式是相似的,当可调整平台46相对于底板44移动时,可调整平台46的通孔110与底板44的通孔108对齐且位置锁52的轴(见图4)经过可调整平台 46的通孔110插入底板44的对齐的通孔108中,以便位置锁52同时与可调整平台46 和底板44固定接合。
52.位置锁52形成为包括限制轴114移动到可调整平台46中的衬圈112。位置锁52的主体116具有圆形顶部,以防止重新定位期间对患者38造成伤害。当位置锁52被定位到通孔108和通孔110中时,主体116充当手柄。一旦位置锁52被定位以将可调整平台 46固定到底板44上,则任何移动都被限制为绕位置锁52的轴线118枢转。然而,由于枢轴杆98也同时与可调整平台46和底板44接合,因而可调整平台46被阻止绕轴线118 枢转,从而被阻止相对于底板44进行任何移动。通过适当地调整通孔108和通孔110的大小和分布通孔108和通孔110,可以将可调整平台46的位置移动到多个位置中的任何一个,以允许在冠状面中调整患者38。应当理解的是,可以改变通孔108和通孔110的大小以及通孔108或通孔110的样式,以改变可调整平台46相对于底板44的位置的数量,图中公开的设置仅用于说明。同样地,也可以改变通道96和枢轴杆98的大小和形状,以改变可用的位置。例如,在一些实施例中,通道96可以呈曲线形状。
53.再次参照图1-4,每个患者定位器26和患者定位器28的侧约束组件50包括充当对患者38的侧约束的一对柱120和柱120,下面将进一步详细描述。每个柱120包括底座 122,衬圈124以及轴126。每个轴126支撑位于轴126上的垫128并配置为接合如图2 和图3中所示的患者38的侧边。每个柱120的底座122配置为固定定位在可调整平台46的通孔110之一中。衬圈124限制柱120的接合,使得底座122不会延伸通过可调整平台46,因此不与底板44接
合,如图5和图6所示。
54.再次参照图4,患者定位器26和患者定位器28还包括相应的支撑组件130和支撑组件132。支撑组件130和支撑组件132均包括一对患者侧支撑134和患者侧支撑134。说明性实施例中的侧支撑134相似并仅在其位置和方位上有所不同。每个侧支撑134包括底座136和缓冲垫138。如图4所示,每个底座136包括多个凸起140,该凸起140从底座136的底部延伸并容纳在可调整平台46的通孔110中,以将患者支撑134定位和固定到可调整平台46上。参照图2和图3,侧支撑134可定位从而以俯卧位支撑患者38 并且具有成角度的上表面144,该上表面144也为患者38提供了一些侧支撑。
55.支撑组件130进一步包括患者中心支撑146,该患者中心支撑146可定位在患者侧支撑134和患者侧支撑134之间以提供对如图2和图3所示的患者38的躯干42的额外支撑。患者中心支撑146还包括底座148,缓冲垫150以及一对凸起152,该凸起152可定位在通孔110中,以将患者中心支撑146固定到可调整平台46上。通常地,患者中心支撑146被定位以支撑患者38的胸骨,而患者侧支撑134和患者侧支撑134接合患者 38的肋骨。
56.患者侧支撑134的缓冲垫138和患者中心支撑146的缓冲垫150包括脊柱手术领域已知的封装泡沫。然而,在一些实施例中,缓冲垫138和缓冲垫150可包括或充分体现为允许在手术期间调整缓冲垫138和缓冲垫150的高度的气囊。例如,图1所示的可选空气系统154可以可操作地连接到缓冲垫138和缓冲垫150,以控制压缩空气流入和流出缓冲垫138和缓冲垫150,以调整缓冲垫138和缓冲垫150的高度。例如,该可调整性允许在手术期间,在矢状面和轴面调整患者38的脊柱。应当理解的是,在手术期间,可以释放或调整定位器26和定位器28中的一个的夹具54和夹具56,以沿轨道12和轨道14改变定位器26和定位器28之间的距离,以在轴面进行调整。可选空气系统154包括压缩空气源,如压缩机。可选空气系统154还包括控制压缩空气流入和流出缓冲垫所必需的本领域已知的控制器、阀、歧管以及管道。
57.通过患者定位器26和患者定位器28的这般理解,可以提供对患者定位器26和患者定位器28的使用案例的简要说明。如图1所示,患者定位器26和患者定位器28被定位到患者支撑装置10上。通常可以预期的是,可调整平台46会被锁定到底板44上,患者侧支撑134和患者中心支撑146会基于患者38的人体测量被定位,侧约束120会被移除以允许患者38被转移到定位器26和定位器28上。如图1所示,在患者38被定位之前,定位器26的可调整平台46偏移了数量164。其他类似的调整可以根据患者38解剖需要或视特定的手术情况在预定位中进行。
58.如图2所示,一旦患者38被定位到定位器26和定位器28上,则通过将底座122放置在可调整平台46的通孔110中,将侧约束120定位,以便每个相应的侧约束120的垫 128均接合患者38的侧边。然后,通过将第一绑带156定位到患者38的下肢40并将绑带156固定到在患者侧支撑134中的每一个的底座136中形成的抓手160上而将患者38 固定。第二绑带162固定到患者38的躯干42上。如上所指出的,虽然本公开中省去了支撑患者所必需的其他支撑结构,但本领域的普通技术人员都能很好地理解。
59.如图2所示,一旦患者被适当的定位和固定,则在整个手术进行过程中,患者定位系统30和患者支撑装置10的结合可能为患者38的位置提供数次调整。例如,在手术期间,可以对患者支撑134的缓冲垫138和患者支撑146的缓冲垫150充气,以在矢状面调整患者脊柱。患者支撑装置10的支撑结构32可以绕轴线22转动,以将患者38从俯卧位移动到侧卧位。
此外,可以调整患者定位器26和患者定位器28中的一个或两个以在冠状面调整患者脊柱。例如,在图3中,移除了患者28的位置锁52,以允许可调整平台46相对于底板44转动,从冠状面中下肢40的轴线166从冠状面中躯干42的轴线 168偏移。尽管未示出,但位置锁52被替换以约束患者38位于图3所示位置,以允许手术进行。因此,患者定位系统30与患者支撑装置10合作以在侧卧位-俯卧位脊柱外科手术期间,在冠状面、矢状面和轴面中提供用来定位和调整患者38的脊柱位置的简单、安全且快速的方法。
60.尽管本公开详细说明了具体实施例,但应当理解的是,在手术期间由患者定位系统 30提供的移动可使用其他用来控制底板44和可调整平台46之间的移动的结构来实现。例如,可以省去位置锁52,而应用可释放的摩擦或吸力锁来固定可调整平台46防止其相对于底板44移动。这些移动也可以通过提供内部锁定的电动执行器和液压致动器中的一个来实现机械化。更进一步地,可以使用多个致动器的组合,使得一个致动器转动可调整平台46,另一个致动器使可调整平台46相对于底板44横向移动。
61.通过使用本领域所熟知的部件和材料,可以预期的是,所公开的实施例基本上是射线可透过的。然而,根据不同应用,一个或多个部件可以是射线不可透过的。
62.尽管本公开涉及具体实施例,但本领域技术人员将理解的是,在不脱离所附权利要求书中所列客体的情况下,可以对形式和细节进行各种改变。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。