1.本实用新型涉及康复装置技术领域,尤其涉及一种新型上肢复健装置及系统。
背景技术:
2.上肢承担了人体从事各项劳动及运动的绝大部分功能,是人体运动系统中动作精细度最高的部位,因此发生在上肢的骨折对于个人从事劳动的能力以及日常的生活都将带来极大的影响。并且,骨折一旦累计腕、肘关节,其手术及术后功能恢复的难度将成几何级增加。临床上骨折术后的早期活动有着非常重要的意义,将直接决定了康复后期肢体功能的预后。然而通常在完成骨折的手术复位内固定后,患者由于长期不能进行正常的肢体及关节活动,加之由于手术创伤、内固定器械、局部炎症反应导致组织增生与黏粘,患者在取出内固定或骨折愈合后常常发生肌肉废用性萎缩以及关节僵硬,导致肢体功能减退和关节活动度降低,患者生活质量大大降低,因此上肢骨折术后的复健锻炼十分重要。
3.目前对于下肢骨折的早期卧床患者临床上多运用cpm机对其早期的肢体复健锻炼进行辅助,可以起到促进患肢功能恢复以及预防深静脉血栓的良好作用。然而对于上肢骨折的患者却没有较为统一、理想的复健辅助装置,且由于各地康复医学的发展水平不同,不同患者的复健锻炼配合度不一,导致多数患者术后不能及时按质按量地完成上肢肢体及关节的复健锻炼,在复诊患者和外地术后初次就诊患者中,存在许多患者肌力减退、关节活动受限、劳动能力下降以及对生活质量不满的情况。
4.目前针对相关技术中存在的操作繁琐、无法定量观测关节复健效能、复健标准不统一等问题,尚未提出有效的解决方案。
技术实现要素:
5.本实用新型的目的是针对现有技术中的不足,提供一种新型上肢复健装置及系统,以解决相关技术中存在的操作繁琐、无法定量观测关节复健效能、复健标准不统一等问题。
6.为实现上述目的,本实用新型采取的技术方案是:
7.第一方面,提供一种新型上肢复健装置,包括:
8.上臂单元;
9.前臂单元,所述前臂单元设置于所述上臂单元的前侧;
10.手掌单元,所述手掌单元设置于所述前臂单元的前侧;
11.弯曲单元,所述弯曲单元分别与所述上臂单元、所述前臂单元、所述手掌单元转动连接;
12.伸缩单元,所述伸缩单元分别与所述上臂单元、所述前臂单元、所述手掌单元连接;
13.牵引单元,所述牵引单元分别与所述前臂单元、所述手掌单元连接。
14.在其中的一些实施例中,所述上臂单元包括:
15.上臂元件;
16.第一连接元件,所述第一连接元件对称地设置于所述上臂元件的两侧,并与所述伸缩单元连接;
17.第二连接元件,所述第二连接元件与所述第一连接元件转动连接,并与所述弯曲单元连接。
18.在其中的一些实施例中,所述上臂单元还包括:
19.第一限位元件,所述第一限位元件设置于所述上臂元件的一侧;
20.第二限位元件,所述第二限位元件设置于所述上臂元件的另一侧,并与所述第一限位元件进行可拆卸连接,用于调节所述上臂元件的尺寸。
21.在其中的一些实施例中,所述上臂单元还包括:
22.第一缓冲元件,所述第一缓冲元件设置于所述上臂元件的内侧。
23.在其中的一些实施例中,所述前臂单元包括:
24.前臂元件;
25.第三连接元件,所述第三连接元件对称地设置于所述前臂元件的两侧,并与所述伸缩单元连接;
26.第四连接元件,所述第四连接元件与所述第三连接元件转动连接,并与所述伸缩单元连接;
27.第五连接元件,所述第五连接元件与所述第三连接元件转动连接,位于所述第四连接元件的外侧,并与所述弯曲单元连接。
28.在其中的一些实施例中,所述前臂单元还包括:
29.第三限位元件,所述第三限位元件设置于所述前臂元件的一侧;
30.第四限位元件,所述第四限位元件设置于所述前臂元件的另一侧,并与所述第三限位元件进行可拆卸连接,用于调节所述前臂元件的尺寸。
31.在其中的一些实施例中,所述前臂单元还包括:
32.第二缓冲元件,所述第二缓冲元件设置于所述前臂元件的内侧。
33.在其中的一些实施例中,所述手掌单元包括:
34.手掌元件;
35.第六连接元件,所述第六连接元件对称地设置于所述手掌元件的两侧,并与所述伸缩单元连接;
36.第七连接元件,所述第七连接元件与所述第六连接元件转动连接,并与所述弯曲单元连接。
37.在其中的一些实施例中,所述手掌单元还包括:
38.保护元件,所述保护元件设置于所述手掌元件的指关节位置。
39.在其中的一些实施例中,所述弯曲单元包括:
40.第一弯曲元件;
41.第八连接元件,所述第八连接元件设置于所述第一弯曲元件的第二端;
42.第九连接元件,所述第九连接元件与所述第八连接元件转动连接;
43.第二弯曲元件,所述第二弯曲元件的第一端与所述第九连接元件连接;
44.其中,所述第一弯曲元件的第一端与所述上臂单元连接,所述第二弯曲元件的第
二端与所述前臂单元连接;或,所述第一弯曲元件的第一端与所述前臂单元连接,所述第二弯曲元件的第二端与所述手掌单元连接。
45.在其中的一些实施例中,所述伸缩单元包括:
46.第一伸缩元件;
47.第二伸缩元件,所述第二伸缩元件与所述第一伸缩元件滑动连接;
48.第一驱动元件,所述第一驱动元件与所述第一伸缩元件、所述第二伸缩元件中的任意一个连接,用于驱动所述第一伸缩元件与所述第二伸缩元件进行相对运动;
49.第一电源元件,所述第一电源元件与所述第一驱动元件连接;
50.其中,所述第一伸缩元件的第一端与所述上臂单元连接,所述第二伸缩元件的第二端与所述前臂单元连接;或者,所述第一伸缩元件的第一端与所述前臂单元连接,所述第二伸缩元件的第二端与所述手掌单元连接。
51.在其中的一些实施例中,所述牵引单元包括:
52.定位元件,所述定位元件设置于所述手掌单元;
53.第二驱动元件,所述第二驱动元件设置于所述前臂单元;
54.第二电源元件,所述第二电源元件与所述第二驱动元件连接;
55.线缆元件,所述线缆元件分别与所述定位元件、所述第二驱动元件连接,用于在所述第二驱动元件的作用下进行伸展或收缩。
56.在其中的一些实施例中,所述定位元件设置于所述手掌单元的手掌侧、手背侧;
57.所述第二驱动元件设置于所述前臂单元的上侧、下侧。
58.在其中的一些实施例中,所述线缆元件分别与位于所述手掌单元的手掌侧的所述定位元件、位于所述前臂单元的上侧的所述第二驱动元件连接;和/或
59.所述线缆元件分别与位于所述手掌单元的手背侧的所述定位元件、位于所述前臂单元的下侧的所述第二驱动元件连接。
60.在其中的一些实施例中,还包括:
61.监测单元,所述监测单元设置于所述上臂单元、所述手掌单元、所述弯曲单元中的至少一个,用于获取所述弯曲单元的弯曲角度。
62.在其中的一些实施例中,所述监测单元包括:
63.若干角度监测元件,若干所述角度监测元件间隔地设置于所述上臂单元、所述手掌单元、所述弯曲单元中的至少一个,用于获取所述弯曲单元的不同位置的弯曲角度。
64.第二方面,提供一种新型上肢复健系统,包括:
65.如第一方面所述的新型上肢复健装置;
66.控制装置,所述控制装置与所述新型上肢复健装置通信连接,用于控制所述伸缩单元、所述牵引单元。
67.本实用新型采用以上技术方案,与现有技术相比,具有如下技术效果:
68.本实用新型的一种新型上肢复健装置及系统,操作简单,便于定量观测关节复健效能,复健标准统一;电控驱动,记录数据便捷,可长时间保持统一姿势;利用可调节的上臂单元和前臂单元,可以适用于不同人群。
附图说明
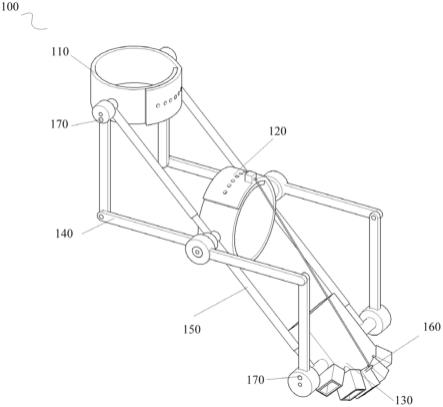
69.图1是根据本实用新型实施例的新型上肢复健装置的示意图;
70.图2是根据本实用新型实施例的上臂单元的示意图;
71.图3是根据本实用新型实施例的前臂单元的示意图;
72.图4是根据本实用新型实施例的手掌单元的示意图;
73.图5是根据本实用新型实施例的弯曲单元的示意图;
74.图6a~6b是根据本实用新型实施例的伸缩单元的示意图;
75.图7a~7b是根据本实用新型实施例的牵引单元的示意图;
76.图8是根据本实用新型实施例的监测单元的示意图;
77.图9是根据本实用新型实施例的新型上肢复健装置的使用状态示意图;
78.图10是根据本实用新型实施例的新型上肢复健系统的示意图。
79.其中的附图标记为:100、新型上肢复健装置;110、上臂单元;111、上臂元件;112、第一连接元件;113、第二连接元件;114、第一限位元件;115、第二限位元件;116、第一缓冲元件;120、前臂单元;121、前臂元件;122、第三连接元件;123、第四连接元件;124、第五连接元件;125、第三限位元件;126、第四限位元件;127、第二缓冲元件;130、手掌单元;131、手掌元件;132、第六连接元件;133、第七连接元件;134、保护元件;140、弯曲单元;141、第一弯曲元件;142、第八连接元件;143、第九连接元件;144、第二弯曲元件;150、伸缩单元;151、第一伸缩元件; 152、第二伸缩元件;153、第一驱动元件;154、第一电源元件;160、牵引单元;161、定位元件; 162、第二驱动元件;163、第二电源元件;164、线缆元件;170、监测单元;171、角度监测元件;
80.200、控制装置。
具体实施方式
81.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动的前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
82.需要说明的是,在不冲突的情况下,本实用新型中的实施例及实施例中的特征可以相互组合。
83.下面结合附图和具体实施例对本实用新型作进一步说明,但不作为本实用新型的限定。
84.实施例1
85.本实施例涉及本实用新型的新型上肢复健装置。
86.本实用新型的一个示意性实施例,如图1所示,一种新型上肢复健装置100,包括上臂单元110、前臂单元120、手掌单元130、弯曲单元140、伸缩单元150和牵引单元160。其中,前臂单元120 设置于上臂单元110的前侧;手掌单元130设置于前臂单元120的前侧;弯曲单元140分别与上臂单元110、前臂单元120、手掌单元130转动连接;伸缩单元150分别与上臂单元110、前臂单元 120、手掌单元130连接;牵引单元160分别与前臂单元120、手掌单元130连接。
87.如图2所示,上臂单元110包括上臂元件111、第一连接元件112和第二连接元件113。其中,第一连接元件112对称地设置于上臂元件111的两侧,并与伸缩单元150连接;第二连接元件113 与第一连接元件112转动连接,并与弯曲单元140连接。
88.具体地,第一连接元件112为两个,两个第一连接元件112对称地设置于上臂元件111的左侧和右侧;第二连接元件113为两个,分别与对应的第一连接元件112转动连接(同轴设置)。
89.在其中的一些实施例中,上臂元件111为上臂环或上臂带。
90.在其中的一些实施例中,第一连接元件112为连接轴,其纵截面呈凸字形,即包括底盘和转轴。
91.在其中的一些实施例中,第二连接元件113为连接盘,其横截面呈环形,其内径与第一连接元件112的转轴的外径相同。
92.在其中的一些实施例中,第二连接元件113的外径与第一连接元件112的外径相同或不同,包括等于、大于、小于三种状态。
93.在其中的一些实施例中,第二连接元件113的外径大于第一连接元件112的外径。
94.进一步地,上臂单元110还包括第一限位元件114和第二限位元件115。其中,第一限位元件 114设置于上臂元件111的一侧;第二限位元件115设置于上臂元件111的另一侧,并与第一限位元件114进行可拆卸连接,用于调节上臂元件111的尺寸。
95.在其中的一些实施例中,第一限位元件114设置于上臂元件111的一侧的外端面,第二限位元件115设置于上臂元件111的一侧的内端面,第一限位元件114和第二限位元件115为子母贴。
96.在其中的一些实施例中,第一限位元件114设置于上臂元件111的一侧的外端面,第二限位元件115设置于上臂元件111的一侧的外端面,第一限位元件114为限位块,第二限位元件115为限位孔,第一限位元件114为1个,第二限位元件115为若干个,第一限位元件114与一第二限位元件115进行可拆卸连接。
97.在其中的一些实施例中,第一限位元件114设置于上臂元件111的一侧的外端面,第二限位元件115设置于上臂元件111的一侧的外端面,第一限位元件114为限位块,第二限位元件115为限位孔,第一限位元件114为若干个,第二限位元件115为若干个,第一限位元件114与对应的第二限位元件115进行可拆卸连接。
98.进一步地,上臂单元110还包括第一缓冲元件116,第一缓冲元件116设置于上臂元件111的内侧。
99.在其中的一些实施例中,第一缓冲元件116可拆卸地覆盖上臂元件111设置。
100.在其中的一些实施例中,第一缓冲元件116与上臂元件111一体成型。
101.在其中的一些实施例中,第一缓冲元件116为软皮材质,上臂元件111为硬皮材质。
102.如图3所示,前臂单元120包括前臂元件121、第三连接元件122、第四连接元件123和第五连接元件124。其中,第三连接元件122对称地设置于前臂元件121的两侧,并与伸缩单元150连接;第四连接元件123与第三连接元件122转动连接,并与伸缩单元150连接;第五连接元件124 与第三连接元件122转动连接,位于第四连接元件123的外侧,并与弯曲单元140连接。
103.具体地,第三连接元件122为两个,两个第三连接元件122对称地设置于前臂元件
121的左侧和右侧;第四连接元件123为两个,分别与对应的第三连接元件122转动连接(同轴设置);第五连接元件124为两个,分别与对应的第四连接元件123转动连接(同轴设置)。
104.在其中的一些实施例中,前臂元件121为前臂环或前臂带。
105.在其中的一些实施例中,第三连接元件122为连接轴,其纵截面呈凸字形,即包括底盘和转轴。
106.在其中的一些实施例中,第四连接元件123为连接轴,其纵截面呈凸字形,即包括底盘和转轴,其中,转轴的内径与第三连接元件122的转轴的外径相同。
107.在其中的一些实施例中,第四连接元件123的外径与第三连接元件122的外径相同或包括,包括等于、大于、小于三种状态。
108.在其中的一些实施例中,第四连接元件123的外径大于第三连接元件122的外径。
109.在其中的一些实施例中,第五连接元件124为连接盘,其横截面呈环形,其内径与第四连接元件123的转轴的外径相同。
110.在其中的一些实施例中,第五连接元件124的外径与第四连接元件123的外径相同或不同,包括等于、大于、小于三种状态。
111.在其中的一些实施例中,第五连接元件124的外径大于第四连接元件123的外径。
112.进一步地,前臂单元120还包括第三限位元件125和第四限位元件126。其中,第三限位元件 125设置于前臂元件121的一侧;第四限位元件126设置于前臂元件121的另一侧,并与第三限位元件125进行可拆卸连接,用于调节前臂元件121的尺寸。
113.在其中的一些实施例中,第三限位元件125设置于前臂元件121的一侧的外端面,第四限位元件126设置于前臂元件121的一侧的内端面,第三限位元件125和第四限位元件126为子母贴。
114.在其中的一些实施例中,第三限位元件125设置于前臂元件121的一侧的外端面,第四限位元件126设置于前臂元件121的一侧的外端面,第三限位元件125为限位块,第四限位元件126为限位孔,第三限位元件125为1个,第四限位元件126为若干个,第三限位元件125与一第四限位元件126进行可拆卸连接。
115.在其中的一些实施例中,第三限位元件125设置于前臂元件121的一侧的外端面,第四限位元件126设置于前臂元件121的一侧的外端面,第三限位元件125为限位块,第四限位元件126为限位孔,第三限位元件125为若干个,第四限位元件126为若干个,第三限位元件125与对应的第四限位元件126进行可拆卸连接。
116.进一步地,前臂单元120还包括第二缓冲元件127,第二缓冲元件127设置于前臂元件121的内侧。
117.在其中的一些实施例中,第二缓冲元件127可拆卸地覆盖前臂元件121设置。
118.在其中的一些实施例中,第二缓冲元件127与前臂元件121一体成型。
119.在其中的一些实施例中,第二缓冲元件127为软皮材质,前臂元件121为硬皮材质。
120.如图4所示,手掌单元130包括手掌元件131、第六连接元件132和第七连接元件133。其中,第六连接元件132对称地设置于手掌元件131的两侧,并与伸缩单元150连接;第七连接元件133 与第六连接元件132转动连接,并与弯曲单元140连接。
121.具体地,第六连接元件132为两个,两个第六连接元件132对称地设置于手掌元件131的左侧和右侧;第七连接元件133为两个,分别与对应的第六连接元件132转动连接(同
轴设置)。
122.在其中的一些实施例中,手掌元件131为手掌套。
123.在其中的一些实施例中,第六连接元件132为连接轴,其纵截面呈凸字形,即包括底盘和转轴。
124.在其中的一些实施例中,第七连接元件133为连接盘,其横截面呈环形,其内径与第六连接元件132的转轴的外径相同。
125.在其中的一些实施例中,第七连接元件133的外径与第六连接元件132的外径相同或不同,包括等于、大于、小于三种状态。
126.进一步地,手掌单元130还包括若干保护元件134,若干保护元件134设置于对应的指关节位置。
127.在其中的一些实施例中,保护元件134为硬质塑料。
128.在其中的一些实施例中,位于小指关节和大拇指关节的保护元件134分别设置有第六连接元件 132。
129.如图5所示,弯曲单元140包括第一弯曲元件141、第八连接元件142、第九连接元件143和第二弯曲元件144。其中,第八连接元件142设置于第一弯曲元件141的第二端;第九连接元件143 与第八连接元件142转动连接;第二弯曲元件144的第一端与第九连接元件143连接;其中,第一弯曲元件141的第一端与上臂单元110连接,第二弯曲元件144的第二端与前臂单元120连接;或,第一弯曲元件141的第一端与前臂单元120连接,第二弯曲元件144的第二端与手掌单元130连接。
130.具体地,第一弯曲元件141为四个,第八连接元件142为四个,第九连接元件143为四个,第二弯曲元件144为四个。其中,两第一弯曲元件141的第一端分别与位于上臂元件111的两侧的第二连接元件113连接,两第二弯曲元件144的第二端分别与位于前臂元件121的两侧的第四连接元件123连接;两第一弯曲元件141的第一端分别与位于前臂元件121的两侧的第五连接元件124 连接,两第二弯曲元件144的第二端分别与位于手掌元件131的两侧的第七连接元件133连接。
131.在其中的一些实施例中,第八连接元件142为连接轴,其纵截面呈凸字形,即包括底盘和转轴。
132.在其中的一些实施例中,第九连接元件143为连接盘,其横截面呈环形,其内径与第八连接元件142的转轴的外径相同。
133.在其中的一些实施例中,第九连接元件143的外径与第八连接元件142的外径相同或不同,包括等于、大于、小于三种状态。
134.在其中的一些实施例中,第九连接元件143的外径大于第八连接元件142的外径。
135.如图6a~6b所示,伸缩单元150包括第一伸缩元件151、第二伸缩元件152、第一驱动元件153 和第一电源元件154。其中,第二伸缩元件152与第一伸缩元件151滑动连接;第一驱动元件153 与第一伸缩元件151、第二伸缩元件152中的任意一个连接,用于驱动第一伸缩元件151与第二伸缩元件152进行相对运动;第一电源元件154与第一驱动元件153连接;其中,第一伸缩元件151 的第一端与上臂单元110连接,第二伸缩元件152的第二端与前臂单元120连接;或者,第一伸缩元件151的第一端与前臂单元120连接,第二伸缩元件152的第二端与手掌单元130连接。
136.具体地,第一伸缩元件151为四个,第二伸缩元件152为四个,第一驱动元件153为四个,第一电源元件154为四个。其中,两第一伸缩元件151的第一端分别与位于上臂元件111的两侧的第一连接元件112连接,两第二伸缩元件152的第二端分别与位于前臂元件121的两侧的第三连接元件122连接;两第一伸缩元件151的第一端分别与位于前臂元件121的两侧的第三连接元件122 连接,两第二伸缩元件152的第二端分别与位于手掌元件131的两侧的第六连接元件132连接。
137.在其中的一些实施例中,第一伸缩元件151为中空套管,第二伸缩元件152为滑杆,第一驱动元件153和第一电源元件154设置于第一伸缩元件151的内部,并与第二伸缩元件152连接,用于驱动第二伸缩元件152滑动。
138.在其中的一些实施例中,第一伸缩元件151为滑杆,第二伸缩元件152为中空套管,第一驱动元件153和第一电源元件154设置于第二伸缩元件152的内部,并与第一伸缩元件151连接,用于驱动第一伸缩元件151滑动。
139.在其中的一些实施例中,第一驱动元件153为驱动电机。
140.在其中的一些实施例中,第一电源元件154为电源。
141.如图7a~7b所示,牵引单元160包括定位元件161、第二驱动元件162、第二电源元件163和线缆元件164。其中,定位元件161设置于手掌单元130;第二驱动元件162设置于前臂单元120;第二电源元件163与第二驱动元件162连接;线缆元件164分别与定位元件161、第二驱动元件162 连接,用于在第二驱动元件162的作用下进行伸展或收缩。
142.具体地,定位元件161设置于手掌元件131的手掌侧和/或手背侧,第二驱动元件162设置于前臂元件121的上侧和/或下侧。
143.在其中的一些实施例中,位于中指关节的保护元件134设置有定位元件161。
144.在其中的一些实施例中,定位元件161为扣环。
145.在其中的一些实施例中,第二驱动元件162为电驱收线器。
146.在其中的一些实施例中,第二电源元件163为电源。
147.在其中的一些实施例中,线缆元件164分别与位于手掌单元130的手掌侧的定位元件161、位于前臂单元120的上侧的第二驱动元件162连接。
148.在其中的一些实施例中,线缆元件164分别与位于手掌单元130的手背侧的定位元件161、位于前臂单元120的下侧的第二驱动元件162连接。
149.在其中的一些实施例中,线缆元件164为尼龙线缆。
150.进一步地,新型上肢复健装置还包括监测单元170,监测单元170设置于上臂单元110、手掌单元130、弯曲单元140中的至少一个,用于获取弯曲单元140的弯曲角度。
151.如图8所示,监测单元170包括若干角度监测元件171,若干角度监测元件171间隔地设置于上臂单元110、手掌单元130、弯曲单元140中的至少一个,用于获取弯曲单元140的不同位置的弯曲角度。
152.在其中的一些实施例中,角度监测元件171设置于第二连接元件113和/或第七连接元件133 结合/或第一弯曲元件141和/或第二弯曲元件144,用于监测第一弯曲元件141和/或第二弯曲元件 144的弯曲角度。
153.在其中的一些实施例中,角度监测元件171设置于第二连接元件113用于监测第一弯曲元件 141的弯曲角度,角度监测元件171设置于第七连接元件133用于监测第二弯曲元
件144的弯曲角度。
154.在其中的一些实施例中,角度监测元件171设置于第一弯曲元件141用于监测第一弯曲元件 141的弯曲角度,角度监测元件171设置于第二弯曲元件144用于监测第二弯曲元件144的弯曲角度。
155.在其中的一些实施例中,角度监测元件171为角位移传感器。
156.本实用新型的使用方法如下,如图9所示:
157.将上臂元件111、前臂元件121和手掌元件131穿戴固定于患者待复健上肢肢体;
158.调整第一限位元件114、第二限位元件115,用以调节上臂元件111的松紧程度,以呈现稳固舒适状态;
159.调整第三限位元件125、第四限位元件126,用于调节前臂元件121的松紧程度,以呈现稳固舒适状态;
160.若仅进行肘关节和前臂肢体的锻炼,则控制上臂元件111和前臂元件121之间的第一伸缩元件 151和第二伸缩元件152进行工作,完成肘关节的屈曲或伸展活动;
161.若仅进行腕关节和手部的锻炼,则先控制上臂元件111和前臂元件121之间的第一伸缩元件 151和第二伸缩元件152进行工作,将肘关节屈曲至合理舒适的角度;再控制第二驱动元件162,收紧线缆元件164,使腕关节掌屈或背屈成一个较小的角度,帮助患者腕关节完成复健前的适应工作;同时控制前臂元件121与手掌元件131之间的第一伸缩元件151和第二伸缩元件152进行工作,达到正确的工作前初始状态,使其不再保持穿戴时与尺桡骨的平行状态,而达到位于掌面或手背面的驱动前状态;继续控制前臂元件121与手掌元件131之间的第一伸缩元件151和第二伸缩元件 152进行工作,完成腕关节更大角度的掌屈或背屈运动,慢慢增加屈曲角度直到患者达到单次最大承受角度;此时,可以根据前臂元件121与手掌元件131之间的第一弯曲元件141、第二弯曲元件 144、第一伸缩元件151、第二伸缩元件152的初始长度,以及屈曲最大角度后第一伸缩元件151 与第二伸缩元件152的长度变化量即可得出此时三角形的三边长度,即可测算出位于腕关节的第一弯曲元件141与第二弯曲元件144之间的角度(或者利用角度监测元件171分别获取第一弯曲元件 141、第二弯曲元件144的弯曲角度),该角度为此次患者腕关节的最大活动角,由康复医生或患者家属记录在复健记录册中,使腕关节维持最大紧张度数秒后松解,反复锻炼数次直到达到此次复健目标活动量,完成一次复健锻炼。
162.本实用新型的优点在于,操作简单,便于定量观测关节复健效能,复健标准统一;电控驱动,记录数据便捷,可长时间保持统一姿势;利用可调节的上臂单元和前臂单元,可以适用于不同人群。
163.实施例2
164.本实施例涉及本发明的新型上肢复健系统。
165.本发明的一个示意性实施例,如图10所示,一种新型上肢复健系统,包括如实施例1所述的新型上肢复健装置100和控制装置200。其中,控制装置200与新型上肢复健装置100通信连接,用于控制伸缩单元150、牵引单元160和监测单元170。
166.具体地,控制装置200分别与第一驱动元件153、第一电源元件154、第二驱动元件162、第二电源元件163和角度监测元件171通信连接。
167.在其中的一些实施例中,控制装置200为终端,包括但不限于智能手机、平板电脑、
笔记本电脑等。
168.在其中的一些实施例中,控制装置200与伸缩单元150、牵引单元160、监测单元170进行有线连接、无线连接。
169.以上所述仅为本实用新型较佳的实施例,并非因此限制本实用新型的实施方式及保护范围,对于本领域技术人员而言,应当能够意识到凡运用本实用新型说明书及图示内容所作出的等同替换和显而易见的变化所得到的方案,均应当包含在本实用新型的保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
