技术特征:
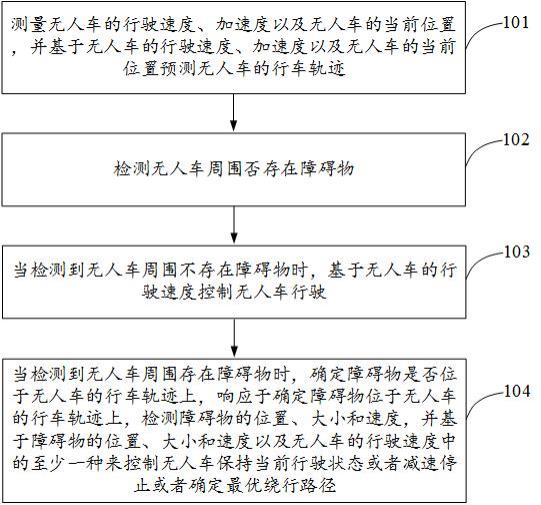
1.一种井下无人车控制方法,其特征在于,由无人车执行,包括:测量所述无人车的行驶速度、加速度以及所述无人车的当前位置,并基于所述无人车的行驶速度、加速度以及所述无人车的当前位置预测所述无人车的行车轨迹;检测所述无人车周围是否存在障碍物;当检测到所述无人车周围不存在障碍物时,基于所述无人车的行驶速度控制所述无人车行驶;当检测到所述无人车周围存在障碍物时,确定所述障碍物是否位于所述无人车的行车轨迹上,响应于确定所述障碍物位于所述无人车的行车轨迹上,检测所述障碍物的位置、大小和速度,并基于所述障碍物的位置、大小和速度以及所述无人车的行驶速度中的至少一种来控制所述无人车保持当前行驶状态或者减速停止或者确定最优绕行路径。2.根据权利要求1所述的方法,其特征在于,所述无人车上设置有速度传感器、加速度传感器、定位模块、激光雷达传感器、超声波测距传感器和红外传感器;其中,所述速度传感器用于测量所述无人车的行驶速度;所述加速度传感器用于测量所述无人车的加速度;所述定位模块和所述激光雷达传感器用于测量所述无人车的当前位置;所述超声波测距传感器和红外传感器用于测量所述无人车周围是否存在障碍物、以及所述障碍物的位置、大小和速度。3.根据权利要求1所述的方法,其特征在于,所述基于所述无人车的行驶速度控制所述无人车行驶,包括:响应于所述无人车的行驶速度介于预定区间,控制无人车保持当前行驶状态;响应于所述无人车的行驶速度不介于所述预定区间,控制所述无人车加速或减速,以使得所述无人车的行驶速度保持在所述预定区间。4.根据权利要求1所述的方法,其特征在于,所述方法还包括:响应于确定所述无人车周围存在障碍物,检测所述障碍物是否为生物;若所述障碍物为生物,则直接控制所述无人车减速停止,并报警警示;若所述障碍物为非生物,检测所述障碍物的位置、大小和速度,并基于所述障碍物的位置、大小和速度以及所述无人车的行驶速度中的至少一种来控制所述无人车保持当前行驶状态或者减速停止或者确定最优绕行路径。5.根据权利要求1或4所述的方法,其特征在于,所述基于所述障碍物的位置、大小和速度以及所述无人车的行驶速度中的至少一种来控制所述无人车保持当前行驶状态或者减速停止或者确定最优绕行路径,包括:确定所述障碍物的大小是否影响所述无人车的正常行驶;响应于所述障碍物的大小不影响所述无人车的正常行驶,控制所述无人车保持当前行驶状态;响应于所述障碍物的大小影响所述无人车的正常行驶,确定所述障碍物的速度是否为零;若所述障碍物的速度为零,基于所述障碍物的位置确定所述无人车是否能绕开所述障碍物;其中,当确定所述无人车能绕开所述障碍物时,控制所述无人车基于所述障碍物的位置、大小以及所述无人车的行驶速度中的至少一种确定出无人车的第一最优绕行路径,所述第一最优绕行路径为:能成功绕行所述障碍物且所需资源最少的路径,并控制所述无人
车按照所述第一最优绕行路径行驶;当确定所述无人车不能绕开所述障碍物时,控制所述无人车减速停止;若所述障碍物的速度不为零,基于所述障碍物的位置、大小和速度计算所述障碍物的途径轨迹,确定所述障碍物的途径轨迹与所述无人车的行车轨迹是否会发生碰撞,当不会发生碰撞时,控制所述无人车保持当前行驶状态;当会发生碰撞时,控制所述无人车基于所述障碍物的位置、大小以及所述无人车的行驶速度中的至少一种确定出无人车的第二最优绕行路径,所述第二最优绕行路径为:能避免所述无人车与所述障碍物发生碰撞且所需资源最少的路径,并控制所述无人车按照所述第二最优绕行路径行驶。6.根据权利要求5所述的方法,其特征在于,基于所述障碍物的位置、大小以及所述无人车的行驶速度中的至少一种确定出无人车的第一最优绕行路径或第二最优行驶路径,包括:基于所述障碍物的位置、大小以及所述无人车的行驶速度中的至少一种将绕行所需路程最短的路径确定为第一最优绕行路径或第二最优行驶路径,或者,将绕行时无人车的行驶速度变化最小的路径确定为第一最优绕行路径或第二最优行驶路径。7.根据权利要求5所述的方法,其特征在于,所述方法还包括:响应于控制所述无人车减速停止,向所述无人车的后方车辆发送第一控制信令,所述第一控制信令用于通知所述后方车辆减速停止;响应于控制所述无人车确定出第一最优绕行路径或第二最优绕行路径,向所述后方车辆发送第二控制信令,所述第二控制信令中包括有无人车确定的第一最优绕行路径或第二最优绕行路径,所述第二控制信令用于通知所述后方车辆基于所述第一最优绕行路径或第二最优绕行路径行驶。8.一种井下无人车控制装置,其特征在于,包括:第一处理模块,用于测量所述无人车的行驶速度、加速度以及所述无人车的当前位置,并基于所述无人车的行驶速度、加速度以及所述无人车的当前位置预测所述无人车的行车轨迹;检测模块,用于检测所述无人车周围是否存在障碍物;控制模块,用于当检测到所述无人车周围不存在障碍物时,基于所述无人车的行驶速度控制所述无人车行驶;第二处理模块,用于当检测到所述无人车周围存在障碍物时,确定所述障碍物是否位于所述无人车的行车轨迹上,响应于确定所述障碍物位于所述无人车的行车轨迹上,检测所述障碍物的位置、大小和速度,并基于所述障碍物的位置、大小和速度以及所述无人车的行驶速度中的至少一种来控制所述无人车保持当前行驶状态或者减速停止或者确定最优绕行路径。9.根据权利要求8所述的装置,其特征在于,所述井下无人车控制装置还用于:响应于确定所述无人车周围存在障碍物,检测所述障碍物是否为生物;若所述障碍物为生物,则直接控制所述无人车减速停止,并报警警示;若所述障碍物为非生物,检测所述障碍物的位置、大小和速度,并基于所述障碍物的位置、大小和速度以及所述无人车的行驶速度中的至少一种来控制所述无人车保持当前行驶状态或者减速停止或者确定最优绕行路径。
10.根据权利要求8或9所述的装置,其特征在于,所述第二处理模块,还用于:确定所述障碍物的大小是否影响所述无人车的正常行驶;响应于所述障碍物的大小不影响所述无人车的正常行驶,控制所述无人车保持当前行驶状态;响应于所述障碍物的大小影响所述无人车的正常行驶,确定所述障碍物的速度是否为零;若所述障碍物的速度为零,基于所述障碍物的位置确定所述无人车是否能绕开所述障碍物;其中,当确定所述无人车能绕开所述障碍物时,控制所述无人车基于所述障碍物的位置、大小以及所述无人车的行驶速度中的至少一种确定出无人车的第一最优绕行路径,所述第一最优绕行路径为:能成功绕行所述障碍物且所需资源最少的路径,并控制所述无人车按照所述第一最优绕行路径行驶;当确定所述无人车不能绕开所述障碍物时,控制所述无人车减速停止;若所述障碍物的速度不为零,基于所述障碍物的位置、大小和速度计算所述障碍物的途径轨迹,确定所述障碍物的途径轨迹与所述无人车的行车轨迹是否会发生碰撞,当不会发生碰撞时,控制所述无人车保持当前行驶状态;当会发生碰撞时,控制所述无人车基于所述障碍物的位置、大小以及所述无人车的行驶速度中的至少一种确定出无人车的第二最优绕行路径,所述第二最优绕行路径为:能避免所述无人车与所述障碍物发生碰撞且所需资源最少的路径,并控制所述无人车按照所述第二最优绕行路径行驶。
技术总结
本申请提出一种井下无人车控制方法及装置,方法包括:测量无人车的行驶速度、加速度和无人车的当前位置,基于无人车的行驶速度、加速度和无人车的当前位置预测无人车的行车轨迹;检测无人车周围是否存在障碍物;当不存在障碍物时,基于无人车的行驶速度控制无人车行驶;当存在障碍物时,确定障碍物是否位于无人车的行车轨迹上,响应于确定位于无人车的行车轨迹上,检测障碍物的位置、大小和速度,并基于障碍物的位置、大小和速度以及无人车的行驶速度中的至少一种来控制无人车保持当前行驶状态或者减速停止或者确定最优绕行路径。本公开提供了一种井下无人车自动避障的方法,提高了井下无人车的避障效率,且所需资源较少。且所需资源较少。且所需资源较少。
技术研发人员:王昊 杨涛 马骁 吴一凡 苏伟伟 周睿 田富超 郑忠宇
受保护的技术使用者:中煤科工集团沈阳研究院有限公司
技术研发日:2022.10.11
技术公布日:2022/11/8
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。