1.本发明属于激光雷达的技术领域,尤其涉及一种星载激光雷达数据采集与自动增益控制系统的设计。
背景技术:
2.激光雷达是激光技术与雷达技术相结合的产物,可用于探测目标距离、速度、大气成分或气体污染物含量等,也可以对目标进行三维成像。大气探测激光雷达是根据激光在大气中传输时产生气溶胶米散射,空气分子瑞利散射等作用,通过探测后向回波信号强度并反演得出气溶胶浓度、水汽等随垂直空间的分布。回波信号强度与激光器发射能量、波长以及望远镜口径、光学路径有关,如激光器能量和望远镜直径越大,回波信号越强,此时采集系统以模拟方式为主,作为主控制器的可编程逻辑器件(fpga)主要实现与ad转换器相关的接口转换、ad时序控制、数据缓存和累加平均等功能,而将回波信号的存储、反演和分析功能交由工业控制计算机完成。相反,微脉冲激光雷达(mpl)具有体积小、重量轻和功耗低的优点,激光器一般采取高重频、低能量方式,望远镜接收的回波信号相对非常微弱,此时数据采集系统需结合光子计数方式探测远场微弱回波信号。
3.星载与地基激光雷达不同,载荷随火箭发射时需承受较大振动,进入预定轨道后自检、对光、探测、采集和控制均为自动进行,因此对系统抗震性、功率消耗及稳定性要求更高。在地面普遍使用的用于反演及控制,装有操作系统的工控机受恶劣环境影响,有死机等不稳定情况发生,不适合用于空间环境。
4.传统是基于“fpga arm”独立双芯片的方案,数据传输的带宽和数据处理的效率低。
技术实现要素:
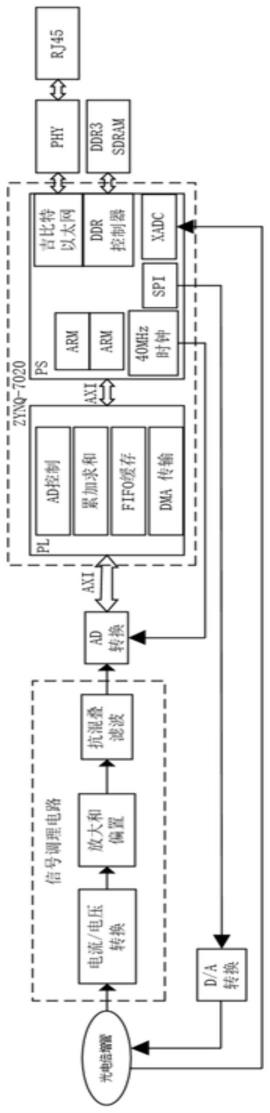
5.为解决背景技术中数据传输的带宽和数据处理的效率低的问题,为此,本发明提出了一种星载激光雷达数据采集与自动增益控制系统的设计,具体方案如下:
6.一种星载激光雷达数据采集与自动增益控制系统的设计,包括依次连接的pmt、信号调理电路、ad转换电路、zynq-7020、以太网phy、rj45,还包括与zynq-7020中ddr控制器连接的ddr3 sdram;所述信号调理电路包括依次连接的电流/电压转换电路、放大与偏置电路、抗混叠滤波电路;所述zynq-7020包括通过axi通信的pl模块和ps模块,pl模块包括ad控制单元、累加求和单元、fifo缓存单元、dma传输单元,ps模块包括arm单元、时钟单元、spi单元、吉比特以太网、ddr控制器、xadc,所述时钟单元与ad转换电路连接,spi单元经过d/a转换单元与pmt连接,pmt与xadc连接;ddr控制器与ddr3 ram单元连接。
7.具体地说,ad转换器选用analog device公司的ad9226芯片。
8.具体地说,fpga是采集系统硬件的核心部分,ad922读出模块从ad芯片读取12位转换数据,与上一次采集的5000个数据按序依次累加,并存入fifo中进行缓存,fifo模块实用xilinx公司现有ip核,配置成5000位存储深度和16位宽度,待累加2000次后,数据被转换位
axi4-stream数据流格式,在register slice寄存后通过dma控制器传输至ps的axi_hp0高性能总线接口,并存入与ps连接的ddr3 ram中。
9.具体地说,经过信号调理电路转化为适合ad转换的信号,zynq的pl负责ad转换器的时序控制,采集并处理完成的数据通过内部高速总线传输到arm进一步软件处理,然后由千兆以太网发送到星载计算机。
10.具体地说,pmt探测器增益可通过外部电压进行控制,控制范围为0.5v-1.1v。
11.具体地说,高位数da转换器选用texas instruments公司的低功耗12位分辨率da转换器tlv5612。
12.具体地说,arm启动后首先完成spi、gpio、fpga实现的dma和ad9226ip核的初始化,配置dma中断寄存器,初始化轻量化tcp/ip协议栈lwip,采集板ip地址设为“192.168.1.8”,端口设为“8088”,传输层采用udp;设置pmt初始控制电压为0.8v;在收到星载计算机开始采集指令后,采集程序在激光器1khz的同步脉冲触发下工作;当pl将累加后的2000发激光的后向回波信号值对应累加后,通过dma控制器转化为axi4-stream流格式存入ddr ram,同时产生dma中断;星载计算机作为udp服务器,周期性发起数据传输请求,作为udp客户端的采集卡在收到请求后,受限于以太网帧最大长度的约束,分多次将滤波后的数据上传至服务器,每一帧携带1024字节数据载荷。
13.具体地说,pmt增益控制支持远程和自动两种模式。远程模式下,由ps的串口通信模块负责与星载计算机通信,板卡将收到的设置值通过tlv5612转为电压,继而使探测器正常工作。
附图说明
14.图1为采集系统整体结构图。
15.图2为ad9226与zynq连接图。
16.图3为fpga逻辑处理硬件流程图。
17.图4为采集程序软件流程图。
18.图5为探测器增益控制程序流程图。
具体实施方式
19.如图1所示,一种星载激光雷达数据采集与自动增益控制系统的设计,包括依次连接的pmt、信号调理电路、ad转换电路、zynq-7020、以太网phy、rj45,还包括与zynq-7020中ddr控制器连接的ddr3 sdram。所述信号调理电路包括依次连接的电流/电压转换电路、放大与偏置电路、抗混叠滤波电路。所述zynq-7020包括通过axi通信的pl模块和ps模块,pl模块包括ad控制单元、累加求和单元、fifo缓存单元、dma传输单元,ps模块包括arm单元、时钟单元、spi单元、吉比特以太网、ddr控制器、xadc,所述时钟单元与ad转换电路连接,spi单元经过d/a转换单元与pmt连接,pmt与xadc连接。ddr控制器与ddr3 ram单元连接。
20.激光与大气相互作用,其后向散射回波信号非常微弱,通过pmt(光电倍增管)探测,需经过信号调理电路转化为适合ad转换的信号,zynq的pl负责ad转换器的时序控制,采集并处理完成的数据通过内部高速总线传输到arm进一步软件处理,然后由千兆以太网发送到星载计算机。
21.采集系统硬件设计的好坏直接决定了回波信号的质量,包括良好的前端电路设计、信噪比较高的ad转换及fpga符合时序要求的控制和处理。硬件部分主要包括电流/电压转换电路、放大与偏置电路、a/d转换、fpga逻辑电路设计及基于da转换器的增益控制电路四部分。
22.2.1信号调理电路
23.激光雷达回波信号非常微弱,采用滨松公司的光电倍增管模块h10721-210接收,该模块内部集成高压电源,采用5v直流供电,输出为电流信号,通过跨阻放大器(tia)将电流转为电压信号,为防止高频尖峰干扰,在放大器反馈环路小容值并联电容。所用ad转换器(参考电压为2v)的输入范围为0-2v,因此增加放大与偏置电路将信号调整到此范围,以最大化利用ad的性能,提高信噪比。
24.2.2ad转换电路
25.如图2所示,ad转换器选用analog device公司的ad9226芯片,采样分辨率为12位,最大支持采样速率为65mhz,本文根据大气探测激光雷达对空间距离分辨率3.75m的要求,采用40mhz采样速率,ad9226与zynq的引脚连接图如图所示。其中d0-d11为12位有效数据位,clk为zynq生成的采样时钟,芯片在此时钟上升沿到来时刻进行以此转换,由ps产生。
26.2.3fpga逻辑电路
27.如图3所示,fpga是采集系统硬件的核心部分,ad9226读出模块从ad芯片读取12位转换数据,与上一次采集的5000个数据按序依次累加,并存入fifo中进行缓存,fifo模块实用xilinx公司现有ip核,配置成5000位存储深度和16位宽度,待累加2000次后,数据被转换位axi4-stream数据流格式,在register slice寄存后通过dma控制器传输至ps的axi_hp0高性能总线接口,并存入与ps连接的ddr3 ram中。axi_hp0支持fifo缓存,避免了数据连续传输产生的拥堵问题。数据传输至ram的同时,由dma同步产生中断,通知ps的arm处理器及时处理。具体流程如图5所示。
28.2.4增益控制电路
29.pmt探测器增益可通过外部电压进行控制,控制范围为0.5v-1.1v,可通过数字电位器、da转换器程控调节。一般高位数da转换器相比数字电位器量化等级更多,具有更高的电压分辨率。本文选用texas instruments公司的低功耗12位分辨率da转换器tlv5612进行调节,tlv5612建立时间可编程选择,有1us快速模式和3us慢速模式,本文设为1us快速模式,提高响应速率,芯片采用spi接口,方便程序进行自动控制,通过ps内spi外设完成通信。采用analog device公司的高精度微功耗、低压差参考电压芯片ref191为tlv5612提供转换的基准,该芯片能最大输出30ma电流,具有5ppm/℃的温度系数,同时支持短路保护功能。与此同时,zynq的xadc模块同步检测控制端口电压值,避免电路故障导致采集数据有误或损坏pmt的情况发生。xadc同样具有12位分辨率,主要用于故障和精度监测,完全满足要求。arm中增益控制程序实时监测pmt信号强度,并通过da转换器调整pmt的控制端口。
30.3.嵌入式软件程序设计
31.嵌入式程序分为数据采集程序和增益控制程序两部分。
32.3.1采集程序设计
33.arm启动后首先完成spi、gpio、fpga实现的dma和ad9226 ip核的初始化,配置dma中断寄存器,初始化轻量化tcp/ip协议栈lwip,采集板ip地址设为“192.168.1.8”,端口设
为“8088”,传输层采用传输效率较高的udp(用户数据报协议)实现,虽然udp不如tcp可靠,但可以通过在应用层增加帧头和帧尾提高可靠性。设置pmt初始控制电压为0.8v,以保证探测器探测到足够强度的信号,便于增益控制程序进行调节。在收到星载计算机开始采集指令后,采集程序在激光器1khz的同步脉冲触发下工作。当pl将累加后的2000发激光的后向回波信号值对应累加后,通过dma控制器转化为axi4-stream流格式存入ddr ram,同时产生dma中断。星载计算机作为udp服务器,周期性发起数据传输请求,作为udp客户端的采集卡在收到请求后,受限于以太网帧最大长度的约束,分多次将滤波后的数据上传至服务器,每一帧携带1024字节数据载荷。如图4所示。
34.3.2探测器增益控制
35.pmt增益控制支持远程和自动两种模式。配置为自动模式后,增益设置无效,由主程序根据探测的信号强度自动调整。远程模式下,由ps的串口通信模块负责与星载计算机通信,板卡将收到的设置值通过tlv5612转为电压,继而使探测器正常工作,此种方式在调试阶段非常有用。为防止探测器控制电压低于0.5v,或高于1.1v范围而不不正常工作或损坏,zynq集成的xadc模块读取当前控制电压,并在写入电压与读取电压差值大于0.01v时发出电路故障告警。
36.针对大气探测激光雷达数据采集的需求,设计一种基于zynq-7020的信号采集和增益控制系统。系统硬件部分由回波信号调理电路和fpga逻辑模块组成。首先光电倍增管探测的微弱电流信号经过信号调理电路使得信噪比得到提高,ad转换器在满量程范围对信号进行数字化,fpga读取、累加和缓存ad转换器的数据,并将数据转换为支持axi4-stream协议,由dma传输至ddr3ram。最后arm处理器进行均值滤波,通过千兆以太网将数据发送到星载计算机。此外系统实时监控探测器增益,并根据回波信号强度动态调整增益值,有效提高了气溶胶探测效率。该系统采用软硬件协同设计,利用fpga的高速并行处理优势驱动ad芯片采集数据,arm的软件灵活性进行数据处理和探测器增益控制,具有体积小、功耗低和稳定性好等优点,有一定的应用价值。
37.大气探测激光雷达发射激光,通过激光与大气相互作用产生后向散射效应,由接收系统探测回波信号强度进而反演大气参量。它由激光器、望远镜及后继光路、探测与采集单元构成。信号探测及采集的精度对气溶胶反演的质量影响较大。zynq-7020全可编程异构平台由pl(programmable logic)和ps(processing system)组成。ps包含双核arm a9处理器,结合丰富的外设模块,可实现多种应用,如以太网通信,ui人机交互等。pl的硬件高速并行处理特点及ps的软件灵活性,pl与ps间高速axi总线的传输机制,相比传统基于“fpga arm”独立双芯片的方案,提升了数据传输的带宽和数据处理的效率。该架构的独特性使其特别适用在激光雷达数据采集与控制等相关领域。
38.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。