技术特征:
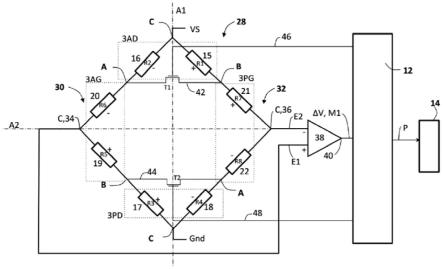
1.电子体重秤类型的称重装置(1),其包括四个支脚,分别为左前、右前、左后和右后,左前支脚包括左前称重传感器(3ag),右前支脚包括右前称重传感器(3ad),左后支脚包括左后称重传感器(3pg),并且右后支脚包括右后称重传感器(3pd),每个称重传感器包括至少两个电阻器(15、16;17、18;19、20;21、22),所述称重传感器组合在惠斯通电桥类型的组合件(28)中,其包括:-第一分支(30)和第二分支(32),所述第一分支和第二分支并联安装在参考电压(vs)与接地电位(gnd)之间,所述第一分支和第二分支布置在穿过所述参考电压和所述接地电位的第一对称轴(a1)的任一侧上;-所述第一分支上的第一中间点(34)和所述第二分支上的第二中间点(36),所述第一分支和第二分支分别包括在所述第一中间点和第二中间点的任一侧上的相同数目的电阻器,以限定穿过所述第一中间点和第二中间点的第二对称轴(a2);以及-第一辅助电路(42),其被配置成选择性地使属于体重秤中的相同第一支脚或两个相邻第一支脚的两个电阻器短路,所述第一辅助电路相对于所述第一轴线(a1)或所述第二轴线(a2)对称,所述组合件(28)由电子控制单元(12)控制,以估计体重并且估计所述体重秤上的用户的偏移。2.根据权利要求1所述的称重装置,其特征在于,所述组合件(28)包括第二辅助电路(44),所述第二辅助电路被配置成使属于所述体重秤中的相同第二支脚或两个相邻第二支脚的两个电阻器短路,所述第二辅助电路相对于所述第一轴线(a1)或第二轴线(a2)对称。3.根据权利要求1所述的称重装置,其特征在于,所述组合件(28)包括第二辅助电路(44),所述第二辅助电路被配置成使属于所述体重秤中的相同第二支脚或两个相邻第二支脚的两个电阻器短路,所述第二辅助电路相对于所述第一轴线(a1)或第二轴线(a2)对称,并且由所述第一辅助电路短路的至少一个电阻器和由所述第二辅助电路短路的至少一个电阻器属于两个相邻支脚。4.根据权利要求2或3所述的称重装置,其特征在于,所述组合件(28)包括第三辅助电路(56),所述第三辅助电路(56)相对于所述第一轴线(a1)或第二轴线(a2)对称,所述第一、第二和第三辅助电路(42、44、56)被配置成涉及所述四个称重传感器中的三个。5.根据权利要求4所述的称重装置,其特征在于,所述第一、第二和第三辅助电路(42、44、56)被配置成使所述四个称重传感器中的三个短路。6.根据前述权利要求中任一项所述的称重装置,其特征在于,一个或每个辅助电路(42、44)包括由所述电子控制单元控制的至少一个开关,例如晶体管(t1、t2)。7.根据前述权利要求中任一项所述的称重装置,其特征在于,一个或每个辅助电路(42、44)包括由所述电子控制单元控制的两个开关,例如两个晶体管(t1、t2;t3、t4)。8.根据前述权利要求中任一项所述的称重装置,其特征在于,一个或每个辅助电路(42、44)连接到以下中的至少一个:所述参考电压(vs)、所述接地电位(gnd)、所述第一中间点(34)或所述第二中间点(36)。9.根据前述权利要求中任一项所述的称重装置,其特征在于,所述中间点(34、36)连接到单个放大器(38),以从所述组合件(28)获得输出信号(δv)。10.根据前述权利要求中任一项所述的称重装置,其进一步包括显示器(12),所述显示
器被配置成向用户显示信息。11.在根据权利要求1至10中任一项所述的称重装置中实施的方法,其包括:-执行来自所述组合件的输出信号的第一测量(m1);-将所述第一辅助电路控制成闭合状态;-执行来自所述组合件的输出信号的第二测量(m2);-基于所述第一和第二测量(m1、m2)而确立用户的体重和偏移。12.根据权利要求11所述的方法,结合权利要求2或3,其包括在所述第二测量之前或之后:-将所述第二辅助电路控制成所述闭合状态;-执行来自所述组合件的输出信号的第三测量(m3);-基于所述第一、第二和第三测量(m1、m2、m3)而确立用户的体重(p)、前后偏移和左右偏移。13.根据权利要求11所述的方法,结合权利要求2,其包括在所述第一测量或第二测量中的任一个之前或之后:-将所述第二辅助电路控制成所述闭合状态;-执行来自所述组合件的输出信号的第三测量(m3);-基于所述第一、第二和第三测量(m1、m2、m3)而至少确立用户的体重(p)和所述称重装置的板的弯曲。14.根据权利要求12所述的方法,结合权利要求4,其包括在所述第一测量、第二测量或第三测量之前或之后:-将所述第三辅助电路(56)控制成所述闭合状态;-执行来自所述组合件的输出信号的第四测量(m4);以及-基于所述第一、第二、第三和第四测量(m1、m2、m3、m4)而确立用户的体重、前后偏移、左右偏移和所述称重装置的板的弯曲。15.根据权利要求11至14中任一项所述的方法,其特征在于,通过将由所述第一、第二和第三测量(m1、m2、m3)组成或由所述第一、第二、第三和第四测量组成的向量(m)乘以转移矩阵(a;a')来计算所述体重、前后偏移和左右偏移。16.根据权利要求15所述的方法,其特征在于,通过理论计算获得所述转移矩阵(a;a')。17.根据权利要求16所述的方法,其特征在于,通过实验方式获得所述转移矩阵(a;a')。18.根据权利要求11至17中任一项所述的方法,其特征在于,将所述体重显示给用户。19.根据权利要求11至18中任一项所述的方法,其特征在于,所述前后偏移和/或左右偏移允许以下中的至少一个:所述体重秤与用户的相互作用、心冲击描记器(bcg)信号的清除,和/或所述体重秤上的用户平衡的分析。20.根据权利要求11至19中任一项所述的方法,其进一步包括使用所获得的偏移信息控制电子系统的步骤。21.根据权利要求1至10中任一项所述的称重装置的用途,所述称重装置用作电子系统的控制器。
22.电子装置控制器,其特征在于,所述控制器是根据权利要求1至10中任一项所述的装置。
技术总结
本公开涉及人体秤类型的电子称重装置(1),其包括四个支脚,每个支脚装配有称重传感器,每个称重传感器包括组合在惠斯通电桥类型的组合件(28)中以限定第一对称轴(A1)和第二对称轴(A2)的两个电阻器,所述组合件进一步包括至少一个辅助电路(42),所述辅助电路被配置成选择性地使属于所述体重秤中的相同支脚或两个相邻支脚的两个电阻器短路,第一辅助电路相对于所述第一轴线(A1)或所述第二轴线(A2)对称,所述组合件(28)由电子控制单元(12)控制以估计体重并且估计所述人体秤上的用户的偏移。移。移。
技术研发人员:皮埃尔-安托伊内
受保护的技术使用者:威辛斯公司
技术研发日:2021.04.15
技术公布日:2022/11/11
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。