1.本发明涉及点云数据处理装置、点云数据处理方法及程序。
背景技术:
2.已知通过激光扫描仪等,利用物体的表面上的反射来获取由物体的表面的具有三维信息的大量点构成的点云数据的技术。另外,由激光扫描仪等获取的构成物体的点云数据的各点数据能够与构成拍摄相同的物体获得的图像的各像素对应。
3.在专利文献1中记载有以下技术:在由摄像装置拍摄的图像中确定标志区域,提取与该区域对应的点云数据,基于所提取的点云数据确定拍摄在图像上的标志的位置、标志的大小。
4.以往技术文献
5.专利文献
6.专利文献1:日本特开2012-83157号公报
技术实现要素:
7.发明要解决的技术课题
8.在此,考虑如专利文献1所记载的技术那样,在图像中确定拍摄有检测对象的物体(专利文献1的技术中的标志)的区域的情况。在图像中确定检测对象的物体的情况下,由于图像是二维信息,因此有时难以准确地确定拍摄有作为期望的检测对象的物体的区域。例如,在作为二维信息的图像中,三维信息中的进深方向的信息被丢失,所以有时难以通过图像的视点来区分圆筒和立方体。在专利文献1中,未提及这样的图像中的区域的确定中的问题。
9.本发明是鉴于这种情况而完成的,其目的是,提供当在图像中确定作为检测对象的物体的区域时能够获得确定结果的正误,并能够有效地利用确定结果的点云数据处理装置、点云数据处理方法及程序。
10.用于解决技术课题的手段
11.作为为了实现上述目的的本发明的一方式的点云数据处理装置具备存储器及处理器,所述存储器将以检测对象的第一物体作为被摄体的图像和表示至少包括第一物体的表面上的大量点的三维信息的点云数据相关联地存储,并将构成图像的像素的位置和构成点云数据的各点数据相关联地存储,其中,处理器获取表示第一物体的形状的特征的第一形状信息,确定根据图像判别的第二物体即与第一形状信息对应的第二物体的物体区域,基于物体区域,选择点云数据中与物体区域对应的第二物体点云数据,基于第二物体点云数据,获取表示第二物体的形状的特征的第二形状信息,比较第一形状信息和第二形状信息,进行第二物体是否是第一物体的判定。
12.根据本方式,可获取表示检测对象的第一物体的形状特征的第一形状信息,另外,可选择与第二物体的物体区域对应的第二物体点云数据,基于第二物体点云数据获取第二
形状信息,其中,所述第二物体与根据图像判别的第一物体对应。而且,本方式通过比较第一形状信息和第二形状信息,进行在图像中被确定的第二物体是否是作为检测对象的第一物体的判定,所以能够获得区域的确定结果的正误,并且能够有效地利用区域的确定结果。
13.优选的是,处理器基于判定结果,向第二物体点云数据赋予属性。
14.优选的是,处理器使显示部显示判定结果。
15.优选的是,第一形状信息是与第一物体的形状的类型相关的信息、与第一物体的表面相关的信息、及与第一物体的尺寸相关的信息中的至少一个。优选的是,第一物体的形状为圆筒形状。
16.优选的是,处理器基于第二物体点云数据,通过霍夫变换处理、ransac算法及进行了机器学习的检测器中的至少一个来获取第二形状信息。优选的是,第一物体是配管。
17.作为本发明的另一方式的点云数据处理方法是使用点云数据处理装置的点云数据处理方法,所述点云数据处理装置具备存储器及处理器,所述存储器将以检测对象的第一物体为被摄体的图像和表示至少包括第一物体的表面上的大量点的三维信息的点云数据相关联地存储,并将构成图像的像素的位置和构成点云数据的各点数据相关联地存储,所述点云数据处理方法包括:通过处理器,获取表示第一物体的形状的特征的第一形状信息的步骤;确定根据图像判别的第二物体即与第一形状信息对应的第二物体的物体区域的步骤;基于物体区域,选择点云数据中与物体区域对应的第二物体点云数据的步骤;基于第二物体点云数据获取表示第二物体的形状的特征的第二形状信息的步骤;以及比较第一形状信息和第二形状信息,进行第二物体是否是第一物体的判定的步骤。
18.作为本发明的另一方式的程序使点云数据处理装置进行点云数据处理方法,所述点云数据处理装置具备存储器及处理器,所述存储器将以检测对象的第一物体作为被摄体的图像和表示至少包括第一物体的表面上的大量点的三维信息的点云数据相关联地存储,并将构成图像的像素的位置和构成点云数据的各点数据相关联地存储,其中,所述程序使处理器进行:获取表示第一物体的形状的特征的第一形状信息的步骤;确定根据图像判别的第二物体即与第一形状信息对应的第二物体的物体区域的步骤;基于物体区域,选择点云数据中与物体区域对应的第二物体点云数据的步骤;基于第二物体点云数据获取表示第二物体的形状的特征的第二形状信息的步骤;以及比较第一形状信息和第二形状信息,进行第二物体是否是第一物体的判定的步骤。
19.发明效果
20.根据本发明,通过比较第一形状信息和第二形状信息,进行在图像中被确定的区域是否是作为检测对象的第一物体的判定,所以能够获得区域的确定结果的正误判定,并且能够有效地利用区域的确定结果。
附图说明
21.图1是表示以不同的视点拍摄物体所得的图像的图。
22.图2是表示点云数据处理装置的功能结构例的框图。
23.图3是表示由三维测量仪1获取输入到点云数据处理装置的图像及点云数据的一方式的概念图。
24.图4是对搭载于三维测量仪的激光扫描仪及摄影装置进行说明的概念图。
25.图5是对图像和点云数据具有对应的位置关系的情况进行说明的概念图。
26.图6是表示点云数据处理方法的流程图。
27.图7是表示确定了物体区域的情况的图。
28.图8是基于物体区域对所选择的点云数据进行说明的图。
29.图9是对由第二形状信息获取部进行的圆筒检测的一例进行说明的图。
30.图10是对使用ransac算法进行的圆筒检测进行说明的图。
具体实施方式
31.下面,按照附图对本发明所涉及的点云数据处理装置、点云数据处理方法及程序的优选实施方式进行说明。
32.首先,对有效地应用本发明的情况进行说明。在由作为二维数据的图像确定作为具有三维形状的检测对象的物体的情况下,由于在图像中维度退化,有时会发生错误检测。
33.图1是表示以不同的视点拍摄具有长方体形状的物体v和具有圆筒形状的物体w所得的图像u1及图像u2的图。在以下的说明中,例如,对检测配管或管(pipe)等具有圆筒形状的物体(第一物体)的情况进行说明。
34.在图1(a)中,示出了拍摄物体v和物体w的x-z平面所得的图像u1,在图1(b)中,示出了拍摄物体v和物体w的x-y平面所得的图像u2。
35.在图1(a)所示的图像u1中,尽管分别具有不同的形状,但是物体v及物体w拍摄为相同的长方形的区域(物体区域v(1)及物体区域v(2))。因此,在通过手动或自动基于图像u1来判别物体v及物体w的情况下,物体区域v(1)及物体区域v(2)有时被判别为具有相同形状的物体的区域。然而,在图1(b)所示的图像u2中,可以看出物体区域v(2)及物体区域w(2)呈现不同的形状,且物体v和物体w具有不同的形状。
36.在检测具有圆筒形状的物体的情况下,有时基于图像u1,物体v及物体w被判别为具有圆筒形状,且在图像u1中区域(物体区域v(1)及物体区域w(1))会被分别确定。在该情况下,因为物体w具有圆筒形状,所以对于物体区域w(1),成为适当的检测,但由于物体v具有长方体形状,因此物体区域v(1)的确定成为错误的检测。这样,不能够有效地利用如包括不是检测对象的物体的区域被错误确定的情况这样的确定结果。因此,在本发明中,提出了基于这样的图像u1来判别并进行被确定的区域的正误判定的技术。
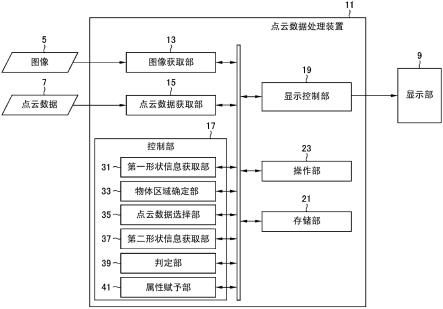
37.图2是表示本发明所涉及的点云数据处理装置11的功能结构例的框图。点云数据处理装置11例如由计算机构成。点云数据处理装置11可以搭载于三维测量仪1(参照图3),也可以由与三维测量仪1分体的计算机构成。
38.点云数据处理装置11具备图像获取部13、点云数据获取部15、控制部17、显示控制部19、操作部23及存储部(存储器)21。此外,虽省略图示,但点云数据处理装置11具备普通计算机所具备的硬件结构。
39.图像获取部13获取将作为检测对象的第一物体作为被摄体所拍摄的图像5。图像获取部13由计算机的数据输入部构成。另外,点云数据获取部15获取表示包括作为检测对象的第一物体的表面的大量点的三维信息的点云数据。图像获取部13及点云数据获取部15由计算机的数据输入部构成。
40.在此,构成图像5的各像素的位置和构成点云数据7的各点数据的三维信息对应。
在此,点云数据7由大量点构成,其各点具有由物体的表面反射的部位的三维信息(三维坐标)。此外,之后将对图像5和点云数据7的对应关系详细地进行说明。
41.控制部17通过搭载在计算机上的cpu(处理器)(central processing unit)(未图示)执行例如存储在存储部21的程序来实现。
42.控制部17具备第一形状信息获取部31、物体区域确定部33、点云数据选择部35、第二形状信息获取部37、判定部39及属性赋予部41。
43.显示控制部19通过cpu执行存储在存储部21的程序来实现。显示控制部19控制向显示部9的显示。例如,在显示部9显示点云数据或图像。另外,在显示部9能够显示由判定部39进行的判定结果而向用户进行报知。
44.存储部21存储由图像获取部13获取的图像5及由点云数据获取部15获取的点云数据7。另外,为了实现点云数据处理装置11的各种功能,存储由cpu执行的各种程序。
45.操作部23由键盘、作为定点设备的一例的鼠标等构成。用户经由操作部23将各种指令输入到点云数据处理装置11。
46.图3是表示由三维测量仪1获取输入到点云数据处理装置11的图像5及点云数据7的一方式的概念图。另外,图4是对搭载于三维测量仪1的激光扫描仪101及摄影装置(摄像装置)102进行说明的概念图。
47.如图3所示,三维测量仪1获取作为测量对象的物体a的点云数据7及拍摄物体a所得的图像5。
48.三维测量仪1是如下方式的测量仪,即,从所搭载的激光扫描仪101(参照图4)出射激光脉冲,通过直至激光脉冲被作为测量对象的物体a的表面反射并返回为止的时间来测量距离的飞行时间方式。另外,激光扫描仪101获取以激光扫描仪101的旋转中心为基准的激光脉冲的出射方向的角度信息(在图3中记载有水平方向α、垂直方向β)。然后,根据测量的距离和激光脉冲的出射方向的角度信息,获取激光脉冲的反射点的三维信息。激光扫描仪101通过以规定的间距变更激光脉冲的出射方向的水平方向α及垂直方向β,获取大量点的三维信息。激光扫描仪101不限于基于飞行时间方式的激光扫描仪,也可以通过相位差方式、三角法方式来获取点云数据。
49.三维测量仪1通过搭载的具有光轴l的摄影装置102(参照图4)获取图像5。摄影装置102包括ccd(charge coupled device)等(未图示)摄像元件。摄像元件具有由沿x方向(水平方向)及y方向(垂直方向)二维排列的光电交换元件构成的多个像素,在多个像素的上表面,具备例如r(红)、g(绿)及b(蓝)的滤光片二维地拜耳排列的彩色滤光片(未图示)。而且,彩色图像的图像5由摄影装置102获取。此外,由摄影装置102获取的图像5不限于彩色图像,也可以是黑白图像。
50.在图4所示的例子中,利用半透明反射镜103,将光轴l设为相同而配置有激光扫描仪101及摄影装置102。此外,激光扫描仪101与摄影装置102的位置关系没有特别限制,只要是已知的即可。例如,也可以不将光轴设为相同而在激光扫描仪101上设置摄影装置102。另外,三维测量仪1能够同时或依次获取点云数据7及图像5。此外,由于构成图像5的像素和构成点云数据7的点数据具有对应的位置关系,因此激光扫描仪101和摄影装置102不限于图4所示的激光扫描仪101和摄影装置102的配置方式,只要预先具有已知的位置关系即可。例如,也可以不设置半透明反射镜103,而以具有相同摄影方向的方式在激光扫描仪101的上
部配置摄影装置102。
51.图5是对图像5和点云数据7具有对应的位置关系的情况进行说明的概念图。图像5是像素p二维排列而成的图像数据。因为图像5是彩色图像,所以像素p对于r、g、b中的每一个具有值。在图5中,示出了图像5中的坐标(px、py)的像素p,且示出了具有与像素p对应的位置关系的点数据q。多个点数据q构成点云数据7,具有作为位置信息的三维坐标(x、y、z)、对应的像素p的r、g、b的值、及激光扫描仪101的激光的反射强度(i)的信息。此外,如在图4所作说明,因为激光扫描仪101与摄影装置102的位置关系是已知的,所以能够获取像素p和点数据q的对应关系。
52.如上所作说明,构成图像5的像素p和构成点云数据7的点数据具有对应的位置关系,图像5和点云数据7保持前述的位置关系并相关地存储于点云数据处理装置11的存储部21。
53.接下来,对使用点云数据处理装置11的点云数据处理方法(及使点云数据处理装置11执行点云数据处理方法的程序)进行说明。此外,图像5和点云数据7预先存储在点云数据处理装置11的存储部21。
54.图6是表示点云数据处理方法的流程图。首先,对构成点云数据处理方法的一系列步骤进行说明,之后对各步骤的详情进行说明。
55.由第一形状信息获取部31获取第一形状信息(第一形状信息获取步骤:步骤s10)。第一形状信息是表示作为检测对象的第一物体的形状特征的信息。接下来,由物体区域确定部33在图像中进行第二物体的物体区域的确定(物体区域确定步骤:步骤s11)。所谓第二物体的物体区域,是指其上拍摄有根据图像5判别为具有由第一形状信息表示的形状特征的第二物体的图像5上的区域。之后,由点云数据选择部35基于物体区域选择点云数据7中与物体区域对应的第二物体点云数据(点云数据选择步骤:步骤s12)。接下来,由第二形状信息获取部37基于第二物体点云数据获取表示第二物体的形状特征的第二形状信息(第二形状信息获取步骤:步骤s13)。之后,由判定部39比较第一形状信息和第二形状信息,进行第二物体是否是第一物体的判定(判定步骤:步骤s14)。之后,属性赋予部41基于判定结果对第二物体点云数据赋予属性。属性赋予部41在第二物体是第一物体的情况下,对所选择的点云数据赋予属性(属性赋予步骤:步骤s15),在第二物体不是第一物体的情况下,不对所选择的点云数据赋予属性(属性赋予步骤:步骤s16)。
56.接下来,对上述的各步骤进行说明。在以下的说明中,对在通过图1进行了说明的图像u1中,从物体v及物体w检测具有圆筒形状的物体的情况进行说明。
57.(第一形状信息获取步骤)
58.第一形状信息获取步骤由第一形状信息获取部31进行。第一形状信息是表示作为检测对象的第一物体的形状特征的信息,因为在进行检测之前确定了检测对象,所以第一形状信息已被确定。第一形状信息获取部31获取存储在存储部21的第一形状信息,或者获取由用户经由操作部23输入的第一形状信息。
59.第一形状信息没有特别限制,只要是表示检测对象的第一物体的形状特征的信息即可。另外,第一形状信息优选为表示第一物体的形状的三维特征的信息。例如,第一形状信息包括与第一物体的形状类型相关的信息、与第一物体的表面相关的信息、及与第一物体的尺寸相关的信息中的至少一个。所谓与第一物体的形状类型相关的信息,例如是指第
一物体具有圆筒形状、长方体形状、球体形状之类的信息。另外,与第一物体的表面相关的信息是第一物体的表面粗糙度等。另外,与第一物体的尺寸相关的信息例如在第一物体为圆筒形状的情况下,是与最大曲率、半径、高度、体积等表示第一物体的形状特征的尺寸相关的信息。
60.在以下说明的检测具有圆筒形状的物体v的例子中,获取“圆筒形状”作为表示物体v的形状特征的第一形状信息。
61.(物体区域确定步骤)
62.物体区域确定步骤由物体区域确定部33进行。物体区域确定部33确定在图像u1中判别出的、拍摄有与第一形状信息对应的物体(第二物体)的物体区域。
63.图7是表示在图像u1中通过第一形状信息“圆筒形状”确定了物体区域v(1)及物体区域w(1)的情况的图。
64.物体区域确定部33通过各种方法进行物体区域的确定。例如,物体区域确定部33由通过深度学习进行了学习的检测器构成,在图像u1中通过进行分段来确定物体区域v(1)或物体区域w(1)。此外,在分段中,可以使用fcn(full convolutional network)、segnet、pix2pix等已有的模型,也可以单独地创建与由物体区域确定部33进行的物体区域的确定方式匹配的模型。另外,构成物体区域确定部33的检测器的学习可以使用深度学习,也可以在广义上使用机器学习。
65.另外,物体区域确定部33也可以基于用户经由操作部23输入的指令来确定物体区域v(1)及物体区域w(1)。例如,也可以是,在图像u1中,用户通过使用操作部23填充物体区域v(1)及物体区域w(1)来输入指令,物体区域确定部33基于该指令来确定物体区域v(1)及物体区域w(1)。另外,也可以是,用户通过操作部23指定图像u1中的物体区域v(1)及物体区域w(1)的内部,物体区域确定部33基于该指定并通过图像处理判定图像u1中的纹理,确定物体区域v(1)及物体区域w(1)。
66.(点云数据选择步骤)
67.点云数据选择步骤由点云数据选择部35进行。构成图像u1的各像素与构成点云数据的点数据对应。因此,点云数据选择部35选择与构成由物体区域确定部33确定的物体区域v(1)及物体区域w(1)的像素对应的点云数据。
68.图8是基于物体区域对所选择的点云数据进行说明的图。在图8中示出了在物体区域确定步骤中在图像u1上确定的物体区域v(1)及物体区域w(1)。另外,在图8中示出了对应于物体区域v(1)且表示物体v的表面上的三维信息的点云数据k、及对应于物体区域w(1)且表示物体w的表面上的三维信息的点云数据j。
69.构成物体区域v(1)及物体区域w(1)的各像素具有与构成点云数据的各点云数据对应的位置关系。
70.具体而言,构成物体区域v(1)的各像素具有与构成点云数据k的各点数据对应的位置关系,另外,构成物体区域w(1)的各像素具有与构成点云数据j的各点数据对应的位置关系。
71.(第二形状信息获取步骤)
72.第二形状信息获取步骤由第二形状信息获取部37进行。第二形状信息获取部37基于所选择的点云数据k及点云数据j,获取与物体区域v(1)及物体区域w(1)对应的形状信息
(第二形状信息)。
73.第二形状信息获取部37基于事先获取的第一形状信息“圆筒形状”,对点云数据k及点云数据j进行圆筒检测,获取第二形状信息。以下,对第二形状信息获取部37进行的圆筒检测的一例进行说明。
74.图9是对由第二形状信息获取部37进行的圆筒检测的一例进行说明的图。第二形状信息获取部37从点云数据k及点云数据j分别选择任意的一个点。在图9所示的情况下,在点云数据k中选择点数据k(1),在点云数据j中选择点数据j(1)。之后,第二形状信息获取部37对点数据k(1)及点数据j(1)计算主曲率(最大曲率及最小曲率)。然后,第二形状信息获取部37提取最小曲率为0且两个主曲率的方向正交的点。在图9所示的情况下,因为点数据k(1)是长方体的表面的点数据,所以最大曲率的方向及最小曲率的方向不会正交、及最小曲率不为0。另一方面,就点数据j(1)而言,最大曲率方向g及最小曲率方向h正交,最小曲率成为0。由此,第二形状信息获取部37获取“点云数据k没有圆筒形状的物体的表面的三维信息”、“点云数据j具有圆筒形状的物体的表面的三维信息”这样的第二形状信息。此外,上述的圆筒检测的方法是一例,第二形状信息获取部37能够通过其他方法对圆筒进行检测。例如,第二形状信息获取部37也可以由进行了机器学习的检测器构成,由该检测器检测圆筒。另外,第二形状信息获取部37也可以进行鲁棒估计以提高检测精度。例如,第二形状信息获取部37能够使用ransac(random sample consensus)算法提高检测精度。
75.图10是对使用ransac算法进行的圆筒检测进行说明的图。
76.在图10所示的情况下,第二形状信息获取部37对具有圆筒形状的物体l1及物体l2的表面的三维信息的点云数据进行使用ransac算法进行的圆筒检测。第二形状信息获取部37通过ransac算法提取多个如上所述最大曲率方向与最小曲率方向正交且最小曲率为0的点数据。这样提取的点数据具有最大曲率类似(圆筒半径类似)、最小曲率方向类似(圆筒轴方向类似)、或者连接性(如果附近有相同性质的点,则连接)的特征。
77.此外,第二形状信息获取部37除了上述的方法之外,还可以使用利用霍夫变换(hough变换)处理的方法、或将ransac算法和霍夫变换处理组合的方法进行圆筒检测。
78.(判定步骤)
79.判定步骤由判定部39进行。通过比较在第一形状信息步骤中获取的第一形状信息和在第二形状信息获取步骤中获取的第二形状信息,进行第二物体是否是第一物体的判定。即,判定部39确定检测对象的物体的区域,或对物体区域v(1)及物体区域w(1)的确定进行正误判定。
80.具体而言,判定在第一形状信息获取步骤中获取的第一形状信息“圆筒形状”和在点云数据k及点云数据j中获取的第二形状信息是否一致。判定部39对第一形状信息“圆筒形状”和点云数据k的第二形状信息“点云数据k没有圆筒形状的物体的表面的三维信息”进行比较,判定为与物体区域v(1)对应的第二物体不是作为检测对象的第一物体。另一方面,判定部39对第一形状信息“圆筒形状”和点云数据j的第二形状信息“点云数据j具有圆筒形状的物体的表面的三维信息”进行比较,判定为与物体区域w(1)对应的第二物体是作为检测对象的第一物体。例如,判定部39的判定结果通过显示控制部19的控制在显示部9进行显示并报知给用户。由此,用户能够识别由物体区域确定部33确定的区域是否是与作为检测对象的物体对应的区域。
81.(属性赋予步骤)
82.属性赋予步骤由属性赋予部41来进行。属性赋予部41对由判定部39判定为与检测对象的物体对应的物体区域的点云数据j赋予属性。另一方面,属性赋予部41不对由判定部39判定为与检测对象的物体不对应的物体区域的点云数据k赋予属性。例如,属性赋予部41对构成点云数据j的点数据赋予“圆筒形状”这样的属性。由此,属性赋予部41能够准确地对检测对象的物体的点云数据赋予属性。
83.如以上所作说明,通过图像u1判别为检测对象是圆筒形状的物体,针对所确定的物体区域v(1)及物体区域w(1)进行确定结果的正误判定。由此,能够有效地利用图像u1中的物体区域v(1)及物体区域w(1)的确定结果。
84.《其他》
85.在上述实施方式中,执行各种处理的控制部17(processing unit)及显示控制部19的类似硬件的结构是如下所示的各种处理器(processor)。各种处理器包括执行软件(程序)并作为各种处理部发挥功能的通用处理器即cpu(central processing unit)、fpga(field programmable gate array)等制造后能够变更电路结构的处理器即可编程逻辑器件(programmable logic device:pld)、asic(application specific integrated circuit)等为了执行确定的处理而具有专门设计的电路结构的处理器即专用电路等。
86.一个处理部可以由这些各种处理器中的一个构成,也可以由相同类型或不同类型的两个以上的处理器(例如,多个fpga、或者cpu与fpga的组合)构成。另外,也可以由一个处理器构成多个处理部。作为由一个处理器构成多个处理部的例子,首先,有以用户端或服务器等计算机为代表,由一个以上的cpu和软件的组合构成一个处理器,且该处理器作为多个处理部发挥功能的方式。其次,有以片上系统(system on chip:soc)等为代表,使用由一个ic(integrated circuit)芯片实现包括多个处理部的系统整体的功能的处理器的方式。这样,各种处理部使用一个以上的上述各种处理器作为硬件结构来构成。
87.此外,更具体地说,这些各种处理器的类似硬件的结构是将半导体元件等电路元件组合而成的电路(circuitry)。
88.上述的各结构及功能可以通过任意的硬件、软件、或者两者的组合来适当地实现。例如,也可以将本发明应用于使计算机执行上述的处理步骤(处理顺序)的程序、记录这种程序的计算机可读记录介质(非暂时性记录介质)、或者能够安装这种程序的计算机。
89.以上对本发明的例子进行了说明,但本发明不限于上述的实施方式,不用说,在不脱离本发明的精神的范围内可以进行各种变形。
90.符号说明
91.1:三维测量仪
92.5:图像
93.7:点云数据
94.9:显示部
95.11:点云数据处理装置
96.13:图像获取部
97.15:点云数据获取部
98.17:控制部
99.19:显示控制部
100.21:存储部
101.23:操作部
102.31:第一形状信息获取部
103.33:物体区域确定部
104.35:点云数据选择部
105.37:第二形状信息获取部
106.39:判定部
107.41:属性赋予部
108.101:激光扫描仪
109.102:摄影装置
110.103:半透明反射镜
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。