技术特征:
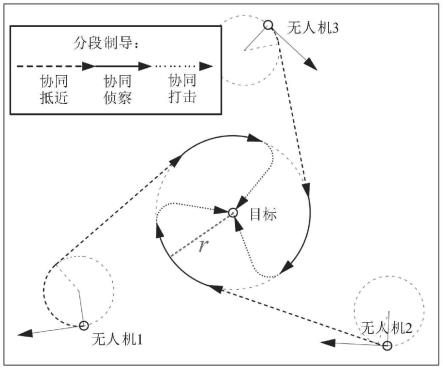
1.一种适用于多无人机协同打击的分段制导方法,其特征在于,包括如下步骤:将目标周围的圆形区域建模为威胁圈;基于威胁圈,将无人机集群的打击过程分为圆外协同抵近段、圆周协同侦察段与圆内协同打击末制导段;其中:在所述圆外协同抵近段,以空间上无人机在威胁圈圆周上均匀分布、时间上所有无人机同时到达威胁圈圆周为约束,进行协同抵近的航迹规划;在所述圆周协同侦察段,采用多无人机圆形编队制导方法,各无人机通过跟踪在威胁圈圆周上均匀分布的引导点并实时调整飞行速度,从而实现圆形编队飞行;在所述圆内协同打击末制导段,采用基于速度调节的时间协同制导方法,以消除时间累积偏差,实现时空约束下的协同攻击任务。2.根据权利要求1所述的适用于多无人机协同打击的分段制导方法,其特征在于,在所述圆外协同抵近段进行协同抵近的航迹规划具体为:建立二维水平面的飞行平面坐标系,并将无人机集群的当前位置信息、目标的位置信息投影至飞行平面坐标系,并在飞行平面坐标系中确定威胁圈;基于各无人机在t0时刻的初始状态以及各无人机在t
f
时刻的所需状态,采用杜宾斯路径进行轨迹规划,建立优化目标函数j为:式中,i=1,2,
···
,n表示无人机的编号,n为无人机集群中无人机的数量;表示第i个相位差,其中,相位差指的是威胁圈圆周上相邻两无人机之间对应的圆心角;t
fi
表示第i架无人机到达威胁圈圆周上时的时间;k1为空间协同权重,k2为时间协调权重,k3为时间最小化权重,d(
·
)代表方差计算;基于优化算法求解上述优化目标函数,即能实现无人机集群协同抵近威胁圈的航迹规划。3.根据权利要求1所述的适用于多无人机协同打击的分段制导方法,其特征在于,在所述圆周协同侦察段采用多无人机圆形编队制导的过程中采用长机-僚机架构,其中:长机的制导策略为:式中,a
⊥
,.0
为长机的法向加速度控制指令,v0为长机的速度,η
i
为长机的引导线和速度矢量之间的角度,l0为长机的引导线长度;僚机的制导策略为:式中,j=1,2,
···
,n-1表示僚机的编号,δv
c,j
为第j架僚机的速度调整量,kv为增益,d
j
为第j架僚机的引导线长度,a
⊥
,j
为第j架僚机的法向加速度控制指令,v
j
为第j架僚机
的速度,η
j
为第j架僚机的引导线和速度矢量之间的角度。4.根据权利要求3所述的适用于多无人机协同打击的分段制导方法,其特征在于,僚机的引导线长度d
j
的计算方法为:式中,p0为长机在威胁圈圆周上的引导点,f1(
·
)表示两圆相交点的计算,即以p
长机
为圆心、以l0为半径的圆,与威胁圈圆周的交点,p
长机
为长机的当前位置,p
t
为目标的位置,r为威胁圈的半径;p
j
为第j架僚机在威胁圈圆周上的引导点,f2(
·
)表示极坐标形式下圆周上某点的坐标,为第j架僚机与长机之间的相位差,f3(
·
)表示空间中两点间的距离计算,p
僚机,j
为第j架僚机的当前位置。5.根据权利要求1至4任一项所述的适用于多无人机协同打击的分段制导方法,其特征在于,在所述圆内协同打击末制导段采用基于速度调节的时间协同制导的过程具体为:基于比例导引律得到各无人机的飞行时间估计;基于比例导引律与各无人机的飞行时间估计,得到二维平面中的末制导控制策略;基于二维平面中的末制导控制策略,得到无人机集群在三维空间中的时间协同末制导控制策略。6.根据权利要求5所述的适用于多无人机协同打击的分段制导方法,其特征在于,所述基于比例导引律得到各无人机的飞行时间估计,具体为:选择比例导引律作为无人机集群的末段制导的基础架构,比例导引律为:式中,i=1,2,
···
,n表示无人机的编号,n为无人机集群中无人机的数量;n为比例系数,ψ
i
为第i架无人机的航向角,t表示当前时刻,λ
i
(t)第i架无人机在当前时刻的视线角速率,a
⊥
,i
第i架无人机的法向加速度控制指令,v
i
(t)为第i架无人机在当前时刻的速度;基于比例导引律得到各无人机的飞行时间估计,为:式中,为第i架无人机在当前时刻的飞行时间估计,r
i
(t)为第i架无人机在当前时刻的位置与目标之间的距离,σ
i
(t)为第i架无人机在当前时刻的速度前置角。7.根据权利要求6所述的适用于多无人机协同打击的分段制导方法,其特征在于,所述二维平面中的末制导控制策略,具体为:
式中,δv
c,i
(t)为第i架无人机在当前时刻的速度调整量,t
go,i
为第i架无人机的期望到达时刻,v
min
为无人机的飞行速度最小值,v
max
为无人机的飞行速度最大值,a
max
为无人机的法向加速度最大值,a
⊥
,i
(t)为第i架无人机在当前时刻的法向加速度控制指令;a
b,i
为第i架无人机法向加速度控制指令的附加分量,为:式中,k
b
表示时间约束的影响程度,r
i
(0)为第i架无人机在切换末制导时刻相对于待攻击目标的距离,为第i架无人机在切换末制导时刻的剩余飞行时间估计。8.根据权利要求7所述的适用于多无人机协同打击的分段制导方法,其特征在于,所述基于二维平面中的末制导控制策略,得到无人机集群在三维空间中的时间协同末制导控制策略,具体为:将无人机在三维空间中视线角速率转至无人机机体坐标系,为:将无人机在三维空间中视线角速率转至无人机机体坐标系,为:式中,表示第i架无人机当前时刻的视线角速率在无人机机体坐标系中的纵向分量、横向分量,γ
i
为第i架无人机的俯仰角,为第i架无人机当前时刻的视线角速率在三维空间的三轴分量;为实现末制导过程在三维空间的时间协调,在横向上采用二维平面中的末制导控制策略对无人机进行调整,在纵向上采用比例导引律对无人机进行调整,因此得到无人机集群在三维空间中的时间协同末制导控制策略为:式中,a
lat,i
(t)为第i架无人机在当前时刻的横向加速度控制指令,为无人机的横向加速度最大值,a
lon,i
(t)为第i架无人机在当前时刻的纵向加速度控制指令,为无人机的纵向加速度最大值。9.根据权利要求8所述的适用于多无人机协同打击的分段制导方法,其特征在于,在末制导过程中实时协调t
go,i
;或t
go,i
为满足约束条件的常值。
技术总结
本发明公开了一种适用于多无人机协同打击的分段制导方法,包括:将无人机集群的打击过程分为圆外协同抵近段、圆周协同侦察段与圆内协同打击末制导段;在圆外协同抵近段进行协同抵近的航迹规划;在圆周协同侦察段采用多无人机圆形编队制导,通过跟踪在威胁圈上均匀分布的引导点并实时调整飞行速度;在圆内协同打击末制导段,采用基于速度调节的时间协同制导方法。本发明应用于无人机航迹规划领域,设计了一致性理论框架下的多无人机攻击角度协同制导律、速度协同调节策略,有效利用无人机速度大小/方向的可调特性,提高攻击时间/角度的动态协同调节范围、抗扰能力及控制精度,在满足打击时间/空间约束前提下实现多无人机对目标的协同打击。标的协同打击。标的协同打击。
技术研发人员:王玉杰 贾高伟 侯中喜 陈清阳 王鹏 鲁亚飞 高显忠 郭正
受保护的技术使用者:中国人民解放军国防科技大学
技术研发日:2022.09.14
技术公布日:2022/11/11
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。