1.本发明涉及城市路灯技术领域,特别涉及根据环境自调节的智慧城市辅助系统。
背景技术:
2.智慧城市是通过智能计算技术的应用使得城市的关键基础设施组件和服务更互联、高效和智能,其中路灯就是城市关键基础设施之一,能够在夜间为人们的出行提供照明功能。
3.现有城市路灯存在以下缺点:
4.1.城市路灯在使用时的亮度固定无法调节,同时城市路灯的启闭通过只能实现定时开关,从而无法适应不同天气情况下自动启闭使用的功能(如雨雪天气下,环境光线可能会提前变黑变暗),适应性极差;
5.2.城市路灯的框架为固定式结构,无法自主调节照明组件的俯仰角度和照射角度,所以城市路灯在组装和安装时精度要求较高,否则无法达到预期的照明效果,灵活性极差;
6.3.由于城市路灯框架为固定式结构,导致其在恶劣天气下无法将照明组件回收保护,容易降低照明组件和框架整体的稳固度和耐久度,稳定性极差。
技术实现要素:
7.有鉴于此,本发明提供根据环境自调节的智慧城市辅助系统,其具有控制组件和调节组件,其中控制组件能够控制联动横杆的使用状态,即控制组件能够控制联动横杆的伸展和收缩动,当联动横杆处于收缩状态时能够对照明灯具进行保护,降低了支撑组件的整体空间,避免该装置受到恶劣天气的影响而损坏,使用稳定,在控制组件控制联动横杆伸展使用的同时,也实现了调节联动横杆俯仰角度的功能,即实现了调节照明灯具俯仰角度的功能,而调节组件能够调节照明灯具的照射角度,使用方便,能够实时调节,且两种调节方式均能够独立调节、互不干扰,使用灵活,能够适应不同环境以及不同照明角度的使用需求,且支撑立柱的顶部设有环境传感器,环境传感器能够根据实际使用情况(比如光线强度、天气状况等)改变装置的使用状态以及照明灯具的亮度,能够实现该装置在不同环境下的自动调节使用需求,灵活性、适应性、稳定性和实用性极强。
8.本发明提供了根据环境自调节的智慧城市辅助系统,具体包括:支撑组件,所述支撑组件包括有支撑立柱和联动横杆,所述支撑立柱固定安装在地面上,且联动横杆的一端转动连接在支撑立柱的顶部;所述支撑立柱的顶部安装有环境传感器,且支撑立柱的内部还安装有控制模块;控制组件,所述控制组件包括有驱动电机、驱动杆和驱动座,所述驱动电机固定安装在支撑立柱的内部,且驱动杆的杆体转动连接在支撑立柱的内部,所述驱动杆的杆体底端与驱动电机的转轴一端传动连接,且驱动座插接在支撑立柱的内部;调节组件,所述调节组件包括有调节电机和控制杆,所述调节电机固定安装在联动横杆的侧面,且控制杆转动连接在联动横杆的内部;照明灯具,所述照明灯具固定安装在控制杆的一端。
9.进一步的,所述驱动座的座体形状为“t”形,且支撑立柱的内部设有轨道槽,驱动座插接在轨道槽的内部。
10.进一步的,所述控制组件还包括有控制连杆,且控制连杆的两端分别固定连接在驱动座的侧面和联动横杆的底部。
11.进一步的,所述驱动杆的杆体外部设有螺纹,且驱动杆通过杆体螺纹拧接在驱动座的内部。
12.进一步的,所述调节电机的转轴一端设有调节锥齿轮,且调节锥齿轮转动连接在联动横杆的内部,控制杆的一端设有适应锥齿轮,且适应锥齿轮与调节锥齿轮的轮齿咬合传动。
13.进一步的,所述调节锥齿轮的转动轴线与联动横杆的转动轴线重合。
14.进一步的,所述控制杆的杆体中部设有定位筒,且定位筒的外部设有定位齿槽,联动横杆的内部插接有定位卡块,且定位卡块的块体底部设有定位卡齿,且定位卡齿插接在定位齿槽的内部。
15.进一步的,所述定位卡块的侧面设有定位顶簧,且定位顶簧的两端分别固定连接在定位卡块的内部和联动横杆的内部。
16.进一步的,所述控制杆的杆体侧面设有限位块,且联动横杆的内部设有限位槽,限位块插接在限位槽的内部。
17.进一步的,所述联动横杆的一端内部设有施力顶块,且施力顶块的内部设有施力顶簧,施力顶簧的两端分别固定连接在施力顶块的内部和联动横杆的内部。
18.有益效果
19.1.该装置控制组件能够控制联动横杆的使用状态,即控制组件能够控制联动横杆的伸展和收缩动,当联动横杆处于收缩状态时能够对照明灯具进行保护,降低了支撑组件的整体空间,避免该装置受到恶劣天气的影响而损坏,使用稳定,在控制组件控制联动横杆伸展使用的同时,也实现了调节联动横杆俯仰角度的功能,即实现了调节照明灯具俯仰角度的功能,而调节组件能够调节照明灯具的照射角度,使用方便,能够实时调节,且两种调节方式均能够独立调节、互不干扰,使用灵活,能够适应不同环境以及不同照明角度的使用需求,且支撑立柱的顶部设有环境传感器,环境传感器能够根据实际使用情况(比如光线强度、天气状况等)改变装置的使用状态以及照明灯具的亮度,能够实现该装置在不同环境下的自动调节使用需求,灵活性、适应性、稳定性和实用性极强。
20.2.该装置处于复位状态时联动横杆处于收缩状态,从而能够降低该装置的占用空间以及结构重心,能够有效抵御外界的恶劣环境,当该装置需要展开使用时,控制组件能够实现联动横杆的自动展开使用,当驱动电机转动时,驱动电机带动驱动杆转动,驱动杆转动时能够通过杆体螺纹带动驱动座向上移动,从而驱动座向上移动时能够通过控制连杆将联动横杆展开进行使用,同时通过改变驱动座的使用位置可改变联动横杆的俯仰使用角度,即改变了照明灯具的俯仰使用角度,调节方便灵活,同时当联动横杆需要再次收缩复位时通过驱动电机控制驱动杆反转即可实现,自动化程度高,灵活性和实用性极强。
21.3.调节组件能够调节照明灯具的照射角度,当调节电机转动时,调节电机转轴一端的调节锥齿轮能够通过适应锥齿轮带动控制杆转动,从而照明灯具能够同步转动改变照射角度,调节方便,使用灵活。
22.4.当调节电机不转动时照明灯具的照射角度能够自动定位,定位卡块在定位顶簧的作用下定位卡齿插接在定位齿槽的内部从而能够对控制杆的使用状态进行定位,即同步的实现了对照明灯具照射角度的限位,当调节电机带动控制杆转动时,控制杆的定位齿槽能够在调节电机的带动下克服定位顶簧对定位卡齿与定位齿槽卡接压力,从而能够实现调节照明灯具照射角度的功能,调节完成后调节电机不再提供驱动调节力度,从而定位卡块在定位顶簧的作用下能够再次通过定位卡齿和定位齿槽的配合作用下实现对照明灯具照射使用角度的定位,使用稳定。
23.5.该装置照明灯具的俯仰角度和照射角度能够独立调节互不干扰,由于电机不通电使用时其转轴能够自由空转,且控制杆被定位卡块定位使用角度和状态,从而当联动横杆在控制组件的带动下改变俯仰角度或者伸展收缩的使用状态时,控制杆的适应锥齿轮能够卡住调节锥齿轮并带动调节锥齿轮转动,从而两个调节方式能够相互独立调节使用,互不干扰,使用灵活,适应性和稳定性极强。
24.6.该装置的施力顶块能够在复位状态时,对联动横杆施加一个远离支撑立柱方向的力,从避免了联动横杆在复位状态时驱动座、控制连杆和联动横杆之间出现结构死点导致装置卡死的现象发生,当该装置处于复位状态时,施力顶块被压缩至联动横杆的内部,从而施力顶簧也处于被压缩蓄能的状态,实现了对联动横杆施加一个远离支撑立柱方向的力的功能,结构稳定,切换顺畅。
附图说明
25.为了更清楚地说明本发明的实施例的技术方案,下面将对实施例的附图作简单地介绍。
26.下面描述中的附图仅仅涉及本发明的一些实施例,而非对本发明的限制。
27.在附图中:
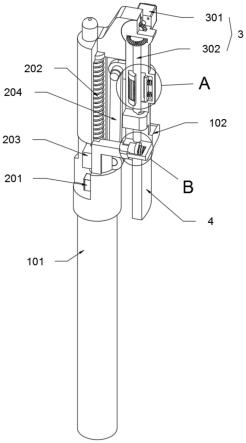
28.图1是本发明的复位状态时结构示意图。
29.图2是本发明图1内部的结构示意图。
30.图3是本发明支撑组件和控制组件拆解后的结构示意图。
31.图4是本发明的调节组件拆解后的结构示意图。
32.图5是本发明的联动横杆伸展使用时内部的结构示意图。
33.图6是本发明的改变联动横杆俯仰角度和照明灯具照射角度后内部的结构示意图。
34.图7是本发明的图2中a部位放大的结构示意图。
35.图8是本发明的图2中b部位放大的结构示意图。
36.图9是本发明的图5中c部位放大的结构示意图。
37.图10是本发明的图5中d部位放大的结构示意图。
38.图11是本发明的控制系统图。
39.附图标记列表
40.1、支撑组件;101、支撑立柱;1011、轨道槽;1012、环境传感器;102、联动横杆;1021、定位卡块;10211、定位卡齿;10212、定位顶簧;1022、限位槽;1023、施力顶块;10231、施力顶簧;2、控制组件;201、驱动电机;202、驱动杆;203、驱动座;204、控制连杆;3、调节组
件;301、调节电机;3011、调节锥齿轮;302、控制杆;3021、适应锥齿轮;3022、定位筒;30221、定位齿槽;3023、限位块;4、照明灯具;01、控制模块。
具体实施方式
41.为了使得本发明的技术方案的目的、方案和优点更加清楚,下文中将结合本发明的具体实施例的附图,对本发明实施例的技术方案进行清楚、完整的描述。除非另有说明,否则本文所使用的术语具有本领域通常的含义。附图中相同的附图标记代表相同的部件。
42.实施例:请参考图1至图11所示:
43.本发明提供根据环境自调节的智慧城市辅助系统,包括支撑组件1,支撑组件1包括有支撑立柱101和联动横杆102,支撑立柱101固定安装在地面上,且联动横杆102的一端转动连接在支撑立柱101的顶部;支撑立柱101的顶部安装有环境传感器1012,且支撑立柱101的内部还安装有控制模块01,环境传感器1012、驱动电机201、调节电机301、照明灯具4和控制模块01与外部电源电性连接,其具体结构与工作原理为现有成熟技术,在此不做累述,环境传感器1012能够根据实际使用情况(比如光线强度、天气状况等)改变联动横杆102的使用状态以及照明灯具4的亮度,能够实现该装置在不同环境下的自动调节使用需求;控制组件2,控制组件2包括有驱动电机201、驱动杆202和驱动座203,驱动电机201固定安装在支撑立柱101的内部,且驱动杆202的杆体转动连接在支撑立柱101的内部,驱动杆202的杆体底端与驱动电机201的转轴一端传动连接,且驱动座203插接在支撑立柱101的内部;调节组件3,调节组件3包括有调节电机301和控制杆302,调节电机301固定安装在联动横杆102的侧面,且控制杆302转动连接在联动横杆102的内部;照明灯具4,照明灯具4固定安装在控制杆302的一端。
44.其中,驱动座203的座体形状为“t”形,且支撑立柱101的内部设有轨道槽1011,驱动座203插接在轨道槽1011的内部,在使用中,轨道槽1011能够限制驱动座203的移动轨迹,从而使得驱动座203在移动时不会出现歪斜、扭曲导致装置卡死失效的现象发生,使用稳定。
45.其中,控制组件2还包括有控制连杆204,且控制连杆204的两端分别固定连接在驱动座203的侧面和联动横杆102的底部,在使用中,该装置处于复位状态时联动横杆102处于收缩状态,从而能够降低该装置的占用空间以及结构重心,能够有效抵御外界的恶劣环境,当该装置需要展开使用时,控制组件2能够实现联动横杆102的自动展开使用,当驱动电机201转动时,驱动电机201带动驱动杆202转动,驱动杆202的杆体外部设有螺纹,且驱动杆202通过杆体螺纹拧接在驱动座203的内部,驱动杆202转动时能够通过杆体螺纹带动驱动座203向上移动,从而驱动座203向上移动时能够通过控制连杆204将联动横杆102展开进行使用,同时通过改变驱动座203的使用位置可改变联动横杆102的俯仰使用角度,即改变了照明灯具4的俯仰使用角度,调节方便灵活,同时当联动横杆102需要再次收缩复位时通过驱动电机201控制驱动杆202反转即可实现,自动化程度高,灵活性和实用性极强。
46.其中,调节电机301的转轴一端设有调节锥齿轮3011,且调节锥齿轮3011转动连接在联动横杆102的内部,控制杆302的一端设有适应锥齿轮3021,且适应锥齿轮3021与调节锥齿轮3011的轮齿咬合传动,在使用中,调节组件3能够调节照明灯具4的照射角度,当调节电机301转动时,调节电机301转轴一端的调节锥齿轮3011能够通过适应锥齿轮3021带动控
制杆302转动,从而照明灯具4能够同步转动改变照射角度,调节方便,使用灵活。
47.其中,控制杆302的杆体中部设有定位筒3022,且定位筒3022的外部设有定位齿槽30221,联动横杆102的内部插接有定位卡块1021,且定位卡块1021的块体底部设有定位卡齿10211,且定位卡齿10211插接在定位齿槽30221的内部,在使用中,当调节电机301不转动时照明灯具4的照射角度能够自动定位,定位卡块1021的侧面设有定位顶簧10212,且定位顶簧10212的两端分别固定连接在定位卡块1021的内部和联动横杆102的内部,定位卡块1021在定位顶簧10212的作用下定位卡齿10211插接在定位齿槽30221的内部从而能够对控制杆302的使用状态进行定位,即同步的实现了对照明灯具4照射角度的限位,当调节电机301带动控制杆302转动时,控制杆302的定位齿槽30221能够在调节电机301的带动下克服定位顶簧10212对定位卡齿10211与定位齿槽30221卡接压力,从而能够实现调节照明灯具4照射角度的功能,调节完成后调节电机301不再提供驱动调节力度,从而定位卡块1021在定位顶簧10212的作用下能够再次通过定位卡齿10211和定位齿槽30221的配合作用下实现对照明灯具4照射使用角度的定位,使用稳定。
48.其中,调节锥齿轮3011的转动轴线与联动横杆102的转动轴线重合,在使用中,照明灯具4的俯仰角度和照射角度能够独立调节互不干扰,由于电机不通电使用时其转轴能够自由空转,且控制杆302被定位卡块1021定位使用角度和状态,从而当联动横杆102在控制组件2的带动下改变俯仰角度或者伸展收缩的使用状态时,控制杆302的适应锥齿轮3021能够卡住调节锥齿轮3011并带动调节锥齿轮3011转动,从而两个调节方式能够相互独立调节使用,互不干扰,使用灵活,适应性和稳定性极强。
49.其中,控制杆302的杆体侧面设有限位块3023,且联动横杆102的内部设有限位槽1022,限位块3023插接在限位槽1022的内部,在使用中,限位块3023能够通过限位槽1022限制控制杆302的最大转动角度,从而避免照明灯具4过渡转动调节降低照明效果的现象发生,使用稳定。
50.其中,联动横杆102的一端内部设有施力顶块1023,且施力顶块1023的内部设有施力顶簧10231,施力顶簧10231的两端分别固定连接在施力顶块1023的内部和联动横杆102的内部,在使用中,施力顶块1023能够在复位状态时,对联动横杆102施加一个远离支撑立柱101方向的力,从避免了联动横杆102在复位状态时驱动座203、控制连杆204和联动横杆102之间出现结构死点导致装置卡死的现象发生,当该装置处于复位状态时,施力顶块1023被压缩至联动横杆102的内部,从而施力顶簧10231也处于被压缩蓄能的状态,实现了对联动横杆102施加一个远离支撑立柱101方向的力的功能,结构稳定,切换顺畅。
51.本实施例的具体使用方式与作用:本发明中,环境传感器1012能够根据实际使用情况(比如光线强度、天气状况等)改变联动横杆102的使用状态以及照明灯具4的亮度,能够实现该装置在不同环境下的自动调节使用需求,装置处于复位状态时联动横杆102处于收缩状态,从而能够降低该装置的占用空间以及结构重心,能够有效抵御外界的恶劣环境,当该装置需要展开使用时,控制组件2能够实现联动横杆102的自动展开使用,当驱动电机201转动时,驱动电机201带动驱动杆202转动,驱动杆202转动时能够通过杆体螺纹带动驱动座203向上移动,从而驱动座203向上移动时能够通过控制连杆204将联动横杆102展开进行使用,施力顶块1023能够在复位状态时,对联动横杆102施加一个远离支撑立柱101方向的力,从避免了联动横杆102在复位状态时驱动座203、控制连杆204和联动横杆102之间出
现结构死点导致装置卡死的现象发生,当该装置处于复位状态时,施力顶块1023被压缩至联动横杆102的内部,从而施力顶簧10231也处于被压缩蓄能的状态,实现了对联动横杆102施加一个远离支撑立柱101方向的力的功能,同时通过改变驱动座203的使用位置可改变联动横杆102的俯仰使用角度,即改变了照明灯具4的俯仰使用角度,同时当联动横杆102需要再次收缩复位时通过驱动电机201控制驱动杆202反转即可实现,调节组件3能够调节照明灯具4的照射角度,当调节电机301转动时,调节电机301转轴一端的调节锥齿轮3011能够通过适应锥齿轮3021带动控制杆302转动,从而照明灯具4能够同步转动改变照射角度,调节电机301不转动时照明灯具4的照射角度能够自动定位,定位卡块1021在定位顶簧10212的作用下定位卡齿10211插接在定位齿槽30221的内部从而能够对控制杆302的使用状态进行定位,即同步的实现了对照明灯具4照射角度的限位,当调节电机301带动控制杆302转动时,控制杆302的定位齿槽30221能够在调节电机301的带动下克服定位顶簧10212对定位卡齿10211与定位齿槽30221卡接压力,从而能够实现调节照明灯具4照射角度的功能,调节完成后调节电机301不再提供驱动调节力度,从而定位卡块1021在定位顶簧10212的作用下能够再次通过定位卡齿10211和定位齿槽30221的配合作用下实现对照明灯具4照射使用角度的定位,照明灯具4的俯仰角度和照射角度能够独立调节互不干扰,由于电机不通电使用时其转轴能够自由空转,且控制杆302被定位卡块1021定位使用角度和状态,从而当联动横杆102在控制组件2的带动下改变俯仰角度或者伸展收缩的使用状态时,控制杆302的适应锥齿轮3021能够卡住调节锥齿轮3011并带动调节锥齿轮3011转动,从而两个调节方式能够相互独立调节使用。
52.最后,需要说明的是,本发明在描述各个构件的位置及其之间的配合关系等时,通常会以一个/一对构件举例而言,然而本领域技术人员应该理解的是,这样的位置、配合关系等,同样适用于其他构件/其他成对的构件。
53.以上所述仅是本发明的示范性实施方式,而非用于限制本发明的保护范围,本发明的保护范围由所附的权利要求确定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。