技术特征:
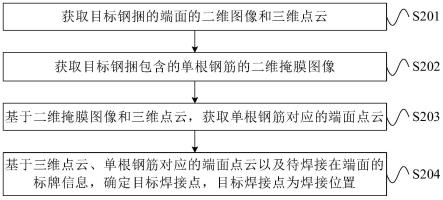
1.一种钢捆标牌焊接方法,其特征在于,包括:获取目标钢捆的端面的二维图像和三维点云;获取所述目标钢捆包含的单根钢筋的二维掩膜图像;基于所述二维掩膜图像和所述三维点云,获取所述单根钢筋对应的端面点云;基于所述三维点云、所述单根钢筋对应的端面点云以及待焊接在所述端面的标牌信息,确定目标焊接点,所述目标焊接点为焊接位置。2.根据权利要求1所述的钢捆标牌焊接方法,其特征在于,所述标牌信息包括标牌大小和所述标牌的焊接位置相对于所述标牌的位置信息,所述基于所述三维点云、所述单根钢筋对应的端面点云以及待焊接在所述端面的标牌信息,确定目标焊接点,包括:根据所述三维点云、所述标牌大小和所述位置信息,确定所述目标焊接区域;根据所述单根钢筋对应的端面点云,确定所述目标焊接区域中的目标钢筋;将所述目标钢筋的中心点确定为所述目标焊接点。3.根据权利要求2所述的钢捆标牌焊接方法,其特征在于,所述根据所述三维点云、所述标牌大小和所述位置信息,确定所述目标焊接区域,包括:根据所述三维点云,获取所述目标钢捆的端面轮廓;根据所述标牌大小和所述目标钢捆的端面轮廓,确定标牌在所述目标钢捆的端面上的固定区域;根据所述位置信息和所述固定区域,确定所述目标焊接区域。4.根据权利要求2所述的钢捆标牌焊接方法,其特征在于,所述根据所述三维点云、所述标牌大小和所述位置信息,确定所述目标焊接区域,包括:根据所述三维点云,获取所述目标钢捆的端面轮廓的中心位姿;根据所述中心位姿、所述标牌大小以及所述位置信息,确定所述目标焊接区域的中心位置;根据所述中心位置和预设焊接范围,确定所述目标焊接区域。5.根据权利要求2所述的钢捆标牌焊接方法,其特征在于,所述根据所述单根钢筋对应的端面点云,确定所述目标焊接区域中的目标钢筋,包括:根据所述单根钢筋对应的端面点云,确定所述目标焊接区域中的钢筋的端面形态;基于所述端面形态,将端部相对于相邻钢筋凸出的钢筋确定为所述目标钢筋。6.根据权利要求1所述的钢捆标牌焊接方法,其特征在于,所述获取所述目标钢捆包含的单根钢筋的二维掩膜图像,包括:将所述二维图像输入目标检测模型进行目标检测,获取所述目标钢捆包含的单根钢筋的二维掩膜图像。7.根据权利要求6所述的钢捆标牌焊接方法,其特征在于,所述目标检测模型是通过以下方式获得的:获取样本图像,所述样本图像包含钢捆端面以及所述钢捆端面的标注信息,所述标注信息用于确定所述钢捆中单根钢筋的掩膜;将所述样本图像输入初始目标检测模型进行拟合处理,得到损失函数值,所述拟合处理用于拟合出所述单根钢筋的掩膜;根据所述损失函数值,调整所述初始目标检测模型的参数,迭代训练初始目标检测模
型,直至计算得到的损失函数值满足预设评估条件,得到所述目标检测模型。8.根据权利要求1至7中任一项所述的钢捆标牌焊接方法,其特征在于,所述获取所述目标钢捆包含的单根钢筋的二维掩膜图像之后,还包括:根据所述目标钢捆包含的单根钢筋的二维掩膜图像,得到所述目标钢捆包含的钢筋数量。9.根据权利要求1至7中任一项所述的钢捆标牌焊接方法,其特征在于,还包括:获取在所述目标焊接点焊接了所述标牌的钢捆的端面的目标二维图像;将所述目标二维图像输入复检模型,得到复检结果;若所述复检结果为没有标牌,则执行所述获取目标钢捆的端面的二维图像和三维点云的步骤。10.根据权利要求9所述的钢捆标牌焊接方法,其特征在于,所述复检模型是通过以下方式获得的:获取样本图像,所述样本图像包含钢捆端面以及所述钢捆端面是否焊接有标牌的标注信息,将所述样本图像按比例分成训练集和验证集;将所述训练集输入初始复检模型中进行训练,并通过初始复检模型的损失函数得到损失函数值,在损失函数值满足预设评估条件时,停止训练;将所述验证集输入经训练的初始复检模型中,输出带有标注信息的样本图像,将所述带有标注信息的样本图像的标注信息与所述验证集中相应样本图像的标注信息进行比较,在准确率高于阈值时,完成对所述复检模型的训练。11.一种钢捆标牌焊接装置,其特征在于,包括:第一获取模块,用于获取目标钢捆的端面的二维图像和三维点云;第二获取模块,用于获取所述目标钢捆包含的单根钢筋的二维掩膜图像;第三获取模块,用于基于所述二维掩膜图像和所述三维点云,获取所述单根钢筋对应的端面点云;确定模块,用于基于所述三维点云、所述单根钢筋对应的端面点云以及待焊接在所述端面的标牌信息,确定目标焊接点,所述目标焊接点为焊接位置。12.一种电子设备,其特征在于,包括:处理器,以及与所述处理器通信连接的存储器;所述存储器存储计算机执行指令;所述处理器执行所述存储器存储的计算机执行指令,以实现如权利要求1至10中任一项所述的钢捆标牌焊接方法。13.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质中存储有计算机程序指令,所述计算机程序指令被处理器执行时,实现如权利要求1至10中任一项所述的钢捆标牌焊接方法。
技术总结
本申请提供一种钢捆标牌焊接方法、装置、设备及存储介质,涉及计算机技术领域,该钢捆标牌焊接方法包括:获取目标钢捆的端面的二维图像和三维点云;获取目标钢捆包含的单根钢筋的二维掩膜图像;基于二维掩膜图像和三维点云,获取单根钢筋对应的端面点云;基于三维点云、单根钢筋对应的端面点云以及待焊接在端面的标牌信息,确定目标焊接点,目标焊接点为焊接位置。本申请能够更加灵活准确地确定标牌焊接点,从而使得焊接的标牌能够更好地满足焊接要求。要求。要求。
技术研发人员:范兴安 张猛飞 付翱
受保护的技术使用者:梅卡曼德(上海)机器人科技有限公司
技术研发日:2022.08.19
技术公布日:2022/11/11
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。