1.本发明涉及直流输电中超低频振荡抑制技术领域,具体为一种用于抑制超低频振荡的多目标鲁棒控制方法。
背景技术:
2.渝鄂柔直背靠背线路的开通,标志着西南电网实现与华中电网的异步运行,西南电网形成了多个直流外送、高水电占比的独立异步电网的新格局。西南电网异步联网缓解了多回直流换相失败造成的暂态功角稳定问题,避免大面积停电风险,但带来了新的问题,如超低频振荡的风险。
3.超低频振荡属于电力系统频率稳定范围。工程调试和研究发现,当发生超低频振荡时,全网机组都参与振荡,振荡频率和相位接近一致,而且机械转矩呈现较大幅度的周期性振荡,电磁转矩的振荡小,与传统低频振荡有显著差异。系统发生超低频振荡主要原因是阻尼不足。水电机组的负阻尼效应,常规控制下直流对频率的不敏感性,造成了西南电网存在超低频振荡的风险。故亟待提出抑制超低频振荡的方法。
4.目前抑制超低频振荡的主要方案为从水轮机调速器参数整定出发,提高水电机组超低频段的阻尼,此类方法需要对每个水电机组的参数进行重新核查整定,工作量大经济性差。由于直流的快速可控性,可以利用直流的快速功率调制作用,有部分方案从直流附加控制出发,然而未考虑不同电力系统本身特性如特征根和传递函数等,没有对不同系统的针对性方案,不能实现系统的各个指标达到综合最优。对于通过辨识算法得到电力系统的数学模型,再根据数学模型利用多目标鲁棒控制方法来抑制超低频振荡的研究非常少。
5.现有技术方案
6.(1)措施1:利用优化调速器pid参数来对电力系统的超低频振荡进行抑制,参考文献为:
7.[参考文献1]肖灿,王德林,李振鹏,等.抑制电力系统超低频振荡的水轮机调速器参数优化控制研究[j].电网技术,2020,44(6):2135-2142.
[0008]
该措施提高了超低频段的阻尼比,但是可能导致其他振荡模式阻尼比恶化。
[0009]
(2)措施2:在直流侧增加直流频率限制控制器(flc)与发电机调速系统协调控制来抑制超低频振荡,参考文献为:
[0010]
[参考文献2]李建,王彪,刘程卓,等.基于直流频率限制控制器的超低频振荡抑制方案[j].高电压技术,2019,45(07):2126-2133
[0011]
该措施不能实现多目标的控制策略,系统鲁棒性可能达不到要求。
[0012]
(3)措施3:发生超低频振荡时,利用暂态能量流监测对超低频振荡贡献大的水电机组,退出阻尼为负的机组从而增加系统阻尼,抑制超低频振荡。
[0013]
[参考文献3]陈磊,路晓敏,陈亦平,等.利用暂态能量流的超低频振荡在线分析与紧急控制方法[j].电力系统自动化,2017,41(17):9-14.
[0014]
该措施退出阻尼为负机组的一次调频功能,不利于系统整体的一次调频,负荷变
化时,频率变化较大。
[0015]
(4)措施4,发生超低频振荡时,增开火电机组,以提高系统阻尼。
[0016]
[参考文献4]villegas h n.electromechanical oscillations in hydro-dominant power systems:an application to the colombian power system[d].ames,lowa:lowa state university,2011.
[0017]
该措施响应速度慢,增开火电机组需要一定的时间。
技术实现要素:
[0018]
针对上述问题,本发明的目的在于提供一种用于抑制超低频振荡的多目标鲁棒控制方法,考虑系统本身的特性,实现多个目标的控制策略,系统性能更好,可针对性的加强系统的鲁棒性或是阻尼比。技术方案如下:
[0019]
一种用于抑制超低频振荡的多目标鲁棒控制方法,包括以下步骤:
[0020]
步骤1:基于时域仿真,对于系统负荷设置小扰动或设置故障,使系统进入超低频振荡模式,并测量系统的频率数据;
[0021]
步骤2:针对时域仿真测量的系统频率数据,利用tls-esprit算法对系统的频率数据进行辨识,得到系统振荡模式的振荡频率和阻尼比信息,进一步得到系统以功率为输入,频率为输出的低阶传递函数;
[0022]
步骤3:根据待定的加权函数和辨识得到的传递函数构建状态空间描述,并求得相应的参数矩阵;
[0023]
步骤4:设定参数以达到控制系统的目标水平;设定系统的目标阻尼比水平,确定配置极点所在的区域;设定h2性能参数以满足系统输出代价要求;设定h
∞
性能参数以满足系统鲁棒性要求;
[0024]
步骤5:联立步骤4指定的参数约束,确立h2性能和h
∞
性能权重,迭代求解得到使得综合性能最优的控制器k(s);
[0025]
步骤6:在整定电流侧安装所设计的多目标鲁棒控制器。
[0026]
进一步的,所述利用tls-esprit算法对系统的频率数据进行辨识具体包括:
[0027]
将需要处理的信号x(n)表示为高斯白噪声和按指数衰减的正弦信号之和:
[0028][0029]
其中,p为人为确定的正弦分量个数的2倍;ts为采样信号的周期;ωk为第k个振荡模态的角频率,ak为振荡幅值,θk为振荡相位,σk为指数衰减因子;ω(n)为高斯白噪声,其特点是时域积分为0;
[0030]
具体求解信号的参数ak,θk,σk,ωk的过程如下:
[0031]
由量测数据x(0)、x(1)、x(2)、
…
、x(n-1)构造增广的hankel矩阵x:
[0032]
[0033]
其中,l i-1=n,n为量测数据点个数;i》p,i为矩阵x的列数;l》p,l为矩阵x的行数;对hankel矩阵x进行svd分解,得:
[0034]
x=u∑vhꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0035]
其中,vh表示v的共轭转置,vvh=i;uuh=i;∑为对角矩阵,且对角线元素为x的奇异值,奇异值按从大到小顺序排列;v分为两个空间,一个为信号子空间vs,vs的列向量由矩阵x中最大的p个奇异值的特征向量组成,一个为噪声子空间vn;
[0036]
令v1为vs删除第一行得到的矩阵,v2为vs最后一行得到的矩阵,并对[v
1v2
]矩阵进行svd分解:
[0037]
[v
1v2
]=rλh
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0038]
将式(4)中得到的2p
×
2p的h矩阵进行分块,成为四个p
×
p子矩阵:
[0039][0040]
旋转因子矩阵φ的tls解为:
[0041]
φ=-h
12h22-1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0042]
求解φ的特征值λk,k=1,2,
…
,p,估算得到信号的各个分量的频率和阻尼比衰减系数:
[0043]
再通过tls求得幅值和初始相角,对于n点信号采样,有
[0044]
y=λc
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)
[0045]
其中,y=[x(0),x(1),
···
,x(n-1)]
t
,c=[c1,c2,
···
,c
p
]
t
,
[0046]
根据总体最小二乘法可得c=(λ
t
λ)-1
λ
t
y,估计出信号的幅值和相角为:
[0047][0048]
其中,a
p
为信号的幅值;为信号的相角;
[0049]
根据tls-esprit算法辨识得到的系统的振荡频率,相位和幅值等信息,通过人为的输入特定信号(如阶跃信号)可以进一步求出输入端到响应端的传递函数。
[0050]
更进一步的,所述步骤3-5具体为:
[0051]
步骤a:根据tls-esprit算法辨识得到的系统传递函数g(s),设计反馈控制器k(s)使得其满足多目标的控制任务,并满足阻尼比约束,h2性能约束和h
∞
性能约束;
[0052]
将系统的传递函数g(s)和待定的加权函数转化为控制系统的状态空间描述:
[0053][0054]z∞
=c1x d
11
w d
12uꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(10)
[0055]
z2=c2x d
22uꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0056]
y=cyx d
y1
w d
y2uꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)
[0057]
其中,z
∞
衡量控制器的鲁棒性,z2衡量控制器的输出代价,w为外部干扰信号,x为状态变量,y为输出量测信号,a、b1、b2、c1、c2、d
11
、d
12
、d
22
为状态方程的参数矩阵,cy、d
y1
、d
y2
为输出方程参数矩阵,状态方程和输出方程参数矩阵可由待定的加权函数和辨识得到传递函数矩阵计算得到;控制器状态方程为:
[0058][0059]
其中,ηc为控制器的状态变量,ac、bc与cc为控制器的待求状态方程矩阵,联立式(9)至(13)得增加控制器后的系统的闭环传函阵为:
[0060][0061]
其中,其中,和组成闭环传函阵;
[0062]
步骤b:进行区域极点配置以实现对阻尼比的约束
[0063]
通过设置锥形区域的夹角,来定义所需阻尼比的界限,当闭环极点位于区域d时,若存在矩阵m实对称阵l满足:
[0064][0065]
其中,c为复数域,a为复数域c中的元素,为a的共轭;则称d是线性矩阵不等式区域。为使闭环极点满足阻尼比约束,即使其极点均位于目标区域d内,当且仅当式(16)成立;
[0066][0067]
其中,符号为矩阵的kronecker乘积,x1为正定矩阵;
[0068]
步骤c:h2性能约束
[0069]
考虑系统输出代价,引入对称矩阵q,给定常数ζ,使得系统的h2范数:
[0070]
||g
zw
(s)||2<ζ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(17)
[0071]
其中,||g
zw
(s)||2表示系统的h2范数;
[0072]
要满足系统的输出代价,当且仅当式(18)到(20)成立:
[0073][0074][0075]
trace(q)<ζ2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(20)
[0076]
其中,q为对称矩阵;trace(q)表示q的迹;
[0077]
步骤d:h
∞
性能约束
[0078]
对于给定的正常数γ,若系统的h
∞
范数||t
zw
(s)||
∞
≤γ,则系统将满足与上界γ对应的鲁棒性能;根据有界实定理,该条件当且仅当式(21)成立
[0079][0080]
步骤e:目标函数的确定
[0081]
根据不同的控制性能需求自由确定α,β,γ,ξ参数,设目标函数为:
[0082]
minα||t
zw
(s)||
∞
β||g
zw
(s)||2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(22)
[0083]
通过联立式(16)到式(22)计算得到满足条件的控制器参数,至此完成控制器设计。
[0084]
本发明的有益效果是:本发明充分利用直流的快速可控技术优势,增加了超低频段的阻尼,而且不会影响其他振荡模式的阻尼;考虑了系统本身的特性,如传递函数特征根等,实现了多个目标的控制策略,该策略系统性能更好,可针对性的加强系统的鲁棒性或是阻尼比等,达到综合性能最优。
附图说明
[0085]
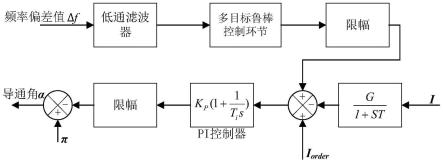
图1为本发明用于抑制超低频振荡的多目标鲁棒控制系统结构示意图。
[0086]
图2为本发明的控制系统模型。
[0087]
图3为区域极点配置示意图。
[0088]
图4为水电直流外送系统模型。
[0089]
图5为不同控制方式下的小扰动频率曲线图。
[0090]
图6为不同控制方式下单相接地短路时频率曲线图。
具体实施方式
[0091]
下面结合附图和具体实施例对本发明做进一步详细说明。本发明提出了一种基于区域极点配置的多目标鲁棒控制方法,包括h2性能、h
∞
性能和阻尼比,是首次将多目标鲁棒控制策略用于直流附加控制中来抑制超低频振荡。本发明用于抑制超低频振荡的多目标鲁棒控制系统结构示意图如图1所示,根据输入的频率偏差值δf,通过巴特沃斯低通滤波器过滤掉其中的高频信号,经过多目标鲁棒控制器处理后,控制器输出信号经过pi控制器后可以调整导通角,进而调整直流输送电流,调整电磁功率使电磁功率和机械功率平衡达到抑制超低频振荡的作用。
[0092]
具体步骤如下:
[0093]
步骤1:基于时域仿真,对于系统负荷设置小扰动或设置故障,使系统进入超低频振荡模式,并测量系统的频率数据;
[0094]
步骤2:针对时域仿真测量的系统频率数据,利用tls-esprit算法对系统的频率数据进行辨识,得到系统振荡模式的振荡频率和阻尼比信息,进一步得到系统以功率为输入,频率为输出的低阶传递函数。
[0095]
步骤3:根据待定的加权函数和辨识得到的传递函数构建状态空间描述,并求得相应的参数矩阵。
[0096]
步骤4:设定参数以达到控制系统的目标水平。设定闭环系统的目标阻尼比水平,确定配置极点所在的区域;设定h2性能参数以满足系统输出代价要求;设定h
∞
性能参数以满足系统鲁棒性要求。
[0097]
步骤5:联立步骤4指定的参数约束,确立h2性能和h
∞
性能权重,迭代求解得到使得综合性能最优的控制器k(s);
[0098]
步骤6:在整定电流侧安装所设计的多目标鲁棒控制器。
[0099]
具体实施如下:
[0100]
1、基于tls-esprit的超低频振荡辨识算法
[0101]
最小二乘-旋转矢量不变技术(tls-esprit)是信号处理的常用手段,是用来恢复被高斯白噪声污染的信号,求解信号参数的常用工具,esprit算法原理是利用特征子空间的分析方法,将信号分解为噪声和信号子空间,对信号进行简化处理,从而估计信号中谐波的参数,再结合tls可以求出信号的相位和幅值。
[0102]
将需要处理的信号x(n)表示为高斯白噪声和按指数衰减的正弦信号之和:
[0103][0104]
其中,p为人为确定的正弦分量个数的2倍;ts为采样信号的周期;ωk为第k个振荡模态的角频率,ak为振荡幅值,θk为振荡相位,σk为指数衰减因子;ω(n)为高斯白噪声,其特点是时域积分为0;
[0105]
具体求解信号的参数ak,θk,σk,ωk的过程如下:
[0106]
由量测数据x(0)、x(1)、x(2)、
…
、x(n-1)构造增广的hankel矩阵x:
[0107][0108]
其中,l i-1=n,n为量测数据点个数;i》p,i为矩阵x的列数;l》p,l为矩阵x的行数;对hankel矩阵x进行svd分解,得:
[0109]
x=u∑vhꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0110]
其中,vh表示v的共轭转置,vvh=i;uuh=i;∑为对角矩阵,且对角线元素为x的奇异值,奇异值按从大到小顺序排列;v分为两个空间,一个为信号子空间vs,vs的列向量由矩阵x中最大的p个奇异值的特征向量组成,一个为噪声子空间vn;
[0111]
令v1为vs删除第一行得到的矩阵,v2为vs最后一行得到的矩阵,并对[v
1v2
]矩阵进行svd分解:
[0112]
[v
1v2
]=rλh
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0113]
将式(4)中得到的2p
×
2p的h矩阵进行分块,成为四个p
×
p子矩阵:
[0114][0115]
旋转因子矩阵φ的tls解为:
[0116]
φ=-h
12h22-1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0117]
求解φ的特征值λk,k=1,2,
…
,p,估算得到信号的各个分量的频率、衰减系数、阻尼比:
[0118]
再通过tls求得幅值和初始相角,对于n点信号采样,有
[0119]
y=λc
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)
[0120]
其中,y=[x(0),x(1),
···
,x(n-1)]
t
,c=[c1,c2,
···
,c
p
]
t
,
[0121]
根据总体最小二乘法可得c=(λ
t
λ)-1
λ
t
y,估计出信号的幅值和相角为:
[0122][0123]
其中,a
p
为信号的幅值;为信号的相角。
[0124]
根据tls-esprit算法辨识得到的系统的振荡频率,相位和幅值等信息,通过人为的输入特定信号(如阶跃信号)可以进一步求出输入端到响应端的传递函数。
[0125]
2、多目标鲁棒控制器设计
[0126]
根据tls-esprit算法辨识得到的系统以功率为输入、频率为输出的传递函数g(s),设计反馈控制器k(s)使得其满足多目标的控制任务,如阻尼比约束,h2性能约束,h
∞
性能约束。控制系统模型如图2所示,图2中w1(s)、w2(s)、w3(s)为待定的加权函数,一般w1(s)具有高通特性,如10s/(s 100),w2(s)具有低通特性,如100/(100s 1),w3(s)为一个较小的常数,如1,z
∞1
、z
∞2
、z2为衡量系统性能的输出,令z
∞
=[z
∞1
,z
∞2
]
t
,w为外部干扰信号,y为输出量测信号,u为控制器输出信号。由传递函数g(s)和待定的加权函数转换为控制系统的状态空间描述:
[0127][0128]z∞
=c1x d
11
w d
12uꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(10)
[0129]
z2=c2x d
22uꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0130]
y=cyx d
y1
w d
y2uꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)
[0131]
其中,z
∞
衡量控制器的鲁棒性,z2衡量控制器的输出代价,a、b1、b2、c1、c2、d
11
、d
12
、d
22
为状态方程参数矩阵,cy、d
y1
、d
y2
为输出方程参数矩阵,状态方程和输出方程参数矩阵可由待定的加权函数和辨识得到传递函数g(s)计算得到。控制器k状态方程为
[0132]
[0133]
其中,ηc为控制器的状态变量,ac、bc与cc为控制器的待求状态方程矩阵,联立式(9)至(13)可得增加控制器后的系统的闭环传函阵为
[0134][0135]
其中,其中,和组成闭环传函阵。
[0136]
(1)区域极点配置
[0137]
区域极点配置用于实现对阻尼比的约束,闭环系统的瞬态响应与极点的位置有关,为了获得良好的响应,同时限制控制器中的高频增益,所有闭环极点应限制在左半平面的预期区域内,如图3所示。通过设置锥形区域的夹角,可以定义所需阻尼比的界限。区域极点配置的优点是不需要指定极点,只要极点在一定范围内,控制系统相对方便实现,要使闭环极点位于区域d且d满足线性矩阵不等式区域,需要存在实矩阵m以及实对称阵l满足式(15)所示:
[0138][0139]
其中,c为复数域;a为复数域c中的元素,为a的共轭;若区域d如图3所示,定义d为阻尼比τ大于cosθ的区域。为使闭环系统矩阵特征值满足阻尼比约束,当且仅当式(16)成立
[0140][0141]
其中,符号为矩阵的kronecker乘积,x1为正定矩阵。
[0142]
(2)h2性能约束
[0143]
考虑系统输出代价,引入对称矩阵q,给定常数ζ,使得系统的h2范数:
[0144]
||g
zw
(s)||2<ζ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(17)
[0145]
其中,||g
zw
(s)||2表示系统的h2范数。
[0146]
要满足该系统的输出代价,当且仅当式(18)到(20)成立:
[0147][0148][0149]
trace(q)<ζ2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(20)
[0150]
其中,q为对称矩阵;trace(q)表示q的迹;
[0151]
(3)h
∞
性能约束
[0152]
对于给定的正常数γ,若系统的h
∞
范数||t
zw
(s)||
∞
≤γ,则系统将满足与上界γ对应的鲁棒性能;根据有界实定理,该条件当且仅当式(21)成立。
[0153][0154]
(4)目标函数的确定
[0155]
根据不同的控制性能需求自由确定α,β,γ,ζ等参数。设目标函数为:
[0156]
minα||t
zw
(s)||
∞
β||g
zw
(s)||2ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(22)
[0157]
通过联立式(16)到式(22)计算得到满足条件的控制器参数,至此完成了控制器设计。
[0158]
实施例:
[0159]
以图4所示水电直流外送系统为例,t=1s时在整流侧时施加0.02p.u.功率的小扰动,得到系统的频率曲线,利用tls-esprit算法辨识得到以功率为输入、以频率为输出的传递函数。确定加权函数并与辨识得到的传递函数转化为状态空间描述,指定目标阻尼比,设定参数α=0.5,β=0.5,不设置γ,ζ的限制,联立各参数的约束方程可得到控制器方程k(s)。
[0160]
实施例1,加入所设计的多目标鲁棒控制器,t=1s时在整流侧时施加0.02p.u.功率的小扰动,不同控制方式下的频率曲线如图5所示。
[0161]
实施例2,加入所设计的多目标鲁棒控制器,t=1s时设置单相接地短路故障,故障持续时间0.5s,不同控制方式下的频率曲线如图6所示。
[0162]
可见在直流侧添加多目标鲁棒控制器后,能满足不同扰动的控制要求,可以快速抑制超低频振荡,有效提升系统的阻尼,增加了系统鲁棒性,证明本发明的有效性。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
