技术特征:
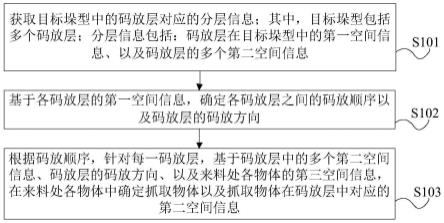
1.一种物体码放方法,其特征在于,包括:获取目标垛型中的码放层对应的分层信息;其中,所述目标垛型包括多个码放层;所述分层信息包括:所述码放层在所述目标垛型中的第一空间信息、以及所述码放层的多个第二空间信息;基于各所述码放层的第一空间信息,确定各所述码放层之间的码放顺序以及所述码放层的码放方向;根据所述码放顺序,针对每一码放层,基于所述码放层中的多个第二空间信息、所述码放层的码放方向、以及来料处各物体的第三空间信息,在所述来料处各物体中确定抓取物体以及抓取物体在所述码放层中对应的第二空间信息。2.根据权利要求1所述的方法,其特征在于,基于所述码放层中的多个第二空间信息、所述码放层的码放方向、以及来料处各物体的第三空间信息,在所述来料处各物体中确定抓取物体以及抓取物体在所述码放层中对应的第二空间信息,包括:确定所述码放层中各所述第二空间信息的占用状态,所述占用状态用于指示所述第二空间信息是否被占用;在未被占用的第二空间信息中,确定第一位置集合,所述第一位置集合包括不会阻碍在其余未被占用的第二空间信息进行物体码放处理的未被占用的第二空间信息;所述物体码放处理的物体进入方向为所述码放层的码放方向;基于所述第一位置集合,以及来料处各物体的第三空间信息,在所述来料处各物体中确定抓取物体以及抓取物体在所述码放层中对应的第二空间信息。3.根据权利要求2所述的方法,其特征在于,基于所述第一位置集合,以及来料处各物体的第三空间信息,在所述来料处各物体中确定抓取物体以及抓取物体在所述码放层中对应的第二空间信息,包括:确定至少一种抓取组合,其中,所述抓取组合包括多个来料处物体;对至少一种所述抓取组合重复进行以下步骤,直至达到预设条件,其中,j为正整数,j的初始值为1:基于第j个抓取组合中的来料处物体的第三空间信息,对第j个抓取组合中的来料处物体进行坐标变换,将该来料处物体的第三空间信息模拟码放至所述码放层中并得到第四空间信息;若所述来料处物体的第四空间信息中存在至少一个第四空间信息不包括在所述第一位置集合中,则将j的取值加1;其中,所述预设条件为全部所述第四空间信息均位于所述第一位置集合中;将符合所述预设条件的抓取组合中的物体确定为抓取物体,并将符合所述预设条件的第四空间信息确定为所述抓取物体在所述码放层中对应的第二空间信息。4.根据权利要求3所述的方法,其特征在于,将符合所述预设条件的抓取组合中的物体确定为抓取物体,并将符合所述预设条件的第四空间信息确定为所述抓取物体在所述码放层中对应的第二空间信息,包括:针对符合所述预设条件的抓取组合,基于所述符合所述预设条件的抓取组合中各来料处物体的第三空间信息、以及所述抓取组合对应的符合所述预设条件的第四空间信息,进行路径规划处理;若确定路径规划处理后的结果中不存在碰撞现象,则将所述抓取组合中的物体确定为抓取物体,并将所述抓取组合对应的符合所述预设条件的第四空间信息确定
为所述抓取物体在所述码放层中对应的第二空间信息。5.根据权利要求3所述的方法,其特征在于,基于第j个抓取组合中的来料处物体的第三空间信息,对第j个抓取组合中的来料处物体进行坐标变换,将该来料处物体的第三空间信息模拟码放至所述码放层中并得到第四空间信息,包括:确定第j个抓取组合对应的多种遍历组合,其中,所述遍历组合包括所述第j个抓取组合中的一个来料处物体以及所述第一位置集合中的一个未被占用的第二空间信息;不同遍历组合中所包含的来料处物体和/或未被占用的第二空间信息不同;基于所述遍历组合中的来料处物体的第三空间信息,以及所述遍历组合中未被占用的第二空间信息,确定坐标变换系数;基于所述坐标变换系数,以及所述遍历组合对应的抓取组合中的来料处物体的第三空间信息,确定坐标变换后的所述来料处物体的第四空间信息。6.根据权利要求3所述的方法,其特征在于,所述抓取组合的排列顺序j的取值与所述抓取组合中的来料处物体的数量呈负相关。7.根据权利要求3所述的方法,其特征在于,所述目标垛型具有朝向信息,所述朝向信息用于指示所述目标垛型中待放置物体的朝向;所述预设条件还包括:所述来料处物体的第二朝向符合所述朝向信息;若所述来料处物体的第四空间信息中存在至少一个第四空间信息不包括在所述第一位置集合中,则将j的取值加1之前,所述方法还包括:基于所述坐标变换系数,以及所述第j个抓取组合中的来料处物体的第一朝向,确定坐标变换后的所述来料处物体的第二朝向;所述若所述来料处物体的第四空间信息中存在至少一个第四空间信息不包括在所述第一位置集合中,则将j的取值加1,包括:若所述来料处物体的第四空间信息中存在至少一个所述第四空间信息不包括在所述第一位置集合中,和/或所述坐标变换后的所述来料处物体的第二朝向不符合所述朝向信息,则将j的取值加1。8.根据权利要求1所述的方法,其特征在于,基于各所述码放层的第一空间信息,确定各所述码放层之间的码放顺序以及所述码放层的码放方向,包括:基于各所述码放层的第一空间信息,确定所述目标垛型中各码放层之间的第一拆垛顺序以及各码放层对应的第一拆垛方向;将各码放层之间的第一拆垛顺序的相反顺序作为所述各码放层之间的码放顺序;针对每一码放层,将所述码放层对应的第一拆垛方向的反方向确定为所述码放层对应的码放方向。9.根据权利要求8所述的方法,其特征在于,基于各所述码放层的第一空间信息,确定所述目标垛型中各码放层之间的第一拆垛顺序以及各码放层对应的第一拆垛方向,包括:确定多种拆垛组合,所述拆垛组合中包括所述目标垛型中各码放层之间的第二拆垛顺序,以及所述各码放层的第二拆垛方向;其中,不同拆垛组合中至少存在一个区别码放层,该区别码放层在不同拆垛组合中的第二拆垛顺序和/或第二拆垛方向不同;针对每一拆垛组合,依据各所述码放层的第一空间信息、所述拆垛组合中的第二拆垛顺序、以及各码放层对应的第二拆垛方向,在所述目标垛型中确定各码放层对应的拆垛路
径;若每一拆垛路径均不会与所述拆垛路径对应的剩余码放层的位置信息发生重叠,则将所述拆垛组合包括所述第二拆垛顺序确定所述目标垛型中各码放层之间的第一拆垛顺序,并将所述拆垛组合包括所述各码放层的第二拆垛方向,确定为各码放层对应的第一拆垛方向,其中,所述拆垛路径对应的剩余码放层为位于所述拆垛路径对应的码放层的拆垛顺序之后的码放层。10.根据权利要求1所述的方法,其特征在于,获取目标垛型中的码放层对应的分层信息,包括:基于来料处各物体的第三空间信息,对目标垛型进行分层处理,得到所述目标垛型的多个码放层以及与各所述码放层对应的分层信息。11.根据权利要求1所述的方法,其特征在于,所述码放层用于存放具有相同尺寸信息的待放置物体。12.根据权利要求1-11中任一项所述的方法,其特征在于,所述方法还包括:将所述码放顺序、以及各所述码放层的多个第二空间信息,发送至来料管理设备,以便所述来料管理设备基于所述码放顺序、以及各所述码放层的多个第二空间信息,对来料处的来料物体进行排序。13.一种物体码放装置,其特征在于,包括:获取单元,用于获取目标垛型中的码放层对应的分层信息;其中,所述目标垛型包括多个码放层;所述分层信息包括:所述码放层在所述目标垛型中的第一空间信息、以及所述码放层的多个第二空间信息;第一确定单元,用于基于各所述码放层的第一空间信息,确定各所述码放层之间的码放顺序以及所述码放层的码放方向;第二确定单元,用于根据所述码放顺序,针对每一码放层,基于所述码放层中的多个第二空间信息、所述码放层的码放方向、以及来料处各物体的第三空间信息,在所述来料处各物体中确定抓取物体以及抓取物体在所述码放层中对应的第二空间信息。14.一种电子设备,包括:处理器,以及与所述处理器通信连接的存储器;所述存储器存储计算机执行指令;所述处理器执行所述存储器存储的计算机执行指令,以实现如权利要求1-12中任一项所述的方法。15.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质中存储有计算机执行指令,所述计算机执行指令被处理器执行时用于实现如权利要求1-12中任一项所述的方法。16.一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现权利要求1-12中任一项所述的方法。
技术总结
本公开提供的物体码放方法、装置及设备,该方法包括:获取目标垛型中的码放层对应的分层信息;目标垛型包括多个码放层;分层信息包括:码放层在目标垛型中的第一空间信息、码放层的多个第二空间信息;基于各码放层的第一空间信息,确定各码放层之间的码放顺序、码放层的码放方向;根据码放顺序,针对每一码放层,基于码放层中的多个第二空间信息、码放层的码放方向、来料处各物体的第三空间信息,在来料处各物体中确定抓取物体和抓取物体在码放层中对应的第二空间信息。通过将目标垛型进行分层,以便码放后的物体可以满足垛型的要求。在对每一层进行码放时,还可以一次抓取码放多个物体,以便提高码放效率。以便提高码放效率。以便提高码放效率。
技术研发人员:张致伟 丁有爽 邵天兰
受保护的技术使用者:梅卡曼德(北京)机器人科技有限公司
技术研发日:2022.08.19
技术公布日:2022/11/11
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。