1.本发明涉及导航技术领域,具体涉及一种基于已编目空间目标序贯观测的自主导航方法。
背景技术:
2.自主导航是指飞行器在不依赖外部支持的情况下,仅利用自身携带的测量设备实时确定自身相对某个坐标系的位置、姿态和速度。先进的自主导航技术是临近空间飞行器自动化、智能化运行的重要保障。
3.目前常用飞行器自主导航技术主要包括惯性导航和卫星导航。惯性导航具有完全自主性的独特优势,但惯性导航的系统误差会随运行时间不断增大,需要其他导航信息进行修正。卫星导航可以提供高精度的定位导航服务,但其不具备完全的自主性,在高强度对抗条件下,卫星导航系统存在精度下降甚至失效的可能性。
4.空间目标包括绕地球飞行的卫星、空间碎片等物体,现有空间态势感知系统已经可以对大部分空间目标进行编目,构建其轨道信息数据库并定期更新。因此,空间目标可以用于实现临近空间飞行器的自主导航,例如:申请号为cn202110484592.9的专利申请、申请号为cn201610693831.0的专利申请均公开了类似的技术;不同的技术路线存在差异,因此也存在各自的优缺点。
5.如申请号为cn202110484592.9的专利申请,要求星敏感器同时观测多个星历已知的卫星,对于星敏感器的视场个数或视场范围存在较高的要求,严重制约了基于已知卫星观测自主导航方法的实际应用。
6.如申请号为cn201610693831.0的专利申请,利用包含已知卫星和恒星的融合星图与星敏感器观测图像进行匹配,以实现对已知卫星目标的识别。但实际星敏感器观测所得图像中,若观测低轨卫星,由于卫星与星敏感器之间相对角速度较大,卫星星象一般不为点状,导致融合星图匹配的难度较大,使得无法准确识别空间目标。
7.综上所述,急需一种基于已编目空间目标序贯观测的自主导航方法以解决现有技术中存在的问题。
技术实现要素:
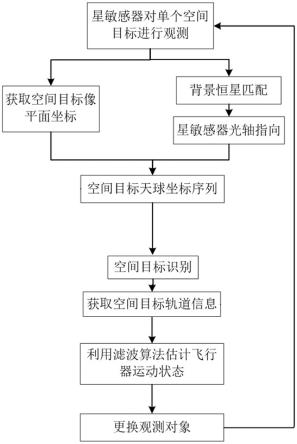
8.本发明目的在于提供一种基于已编目空间目标序贯观测的自主导航方法,旨在解决基于空间目标的现有导航方法中,需要观测多个星历已知的空间目标存在实际应用效果较差,以及融合星图匹配难度较大导致空间目标识别困难的问题,具体技术方案如下:一种基于已编目空间目标序贯观测的自主导航方法,包括以下步骤:步骤s1:利用星敏感器对单个已编目的空间目标进行序贯观测,根据观测图像获取观测的空间目标在星敏感器像平面的坐标;步骤s2:利用观测图像中的背景恒星与恒星星表进行匹配,获得星敏感器光轴在惯性空间中的指向;
步骤s3:根据观测空间目标的像平面坐标和星敏感器光轴指向,计算观测空间目标的天球坐标;步骤s4:将一段观测时间内获取的观测空间目标的天球坐标序列,在已知空间目标编目数据库进行匹配,识别出该观测空间目标并获取其轨道位置信息;步骤s5:构建导航系统模型,利用滤波算法获得飞行器的运动状态。
9.以上技术方案中优选的,还包括步骤s6:更换观测空间目标,重复步骤s1-步骤s5实现持续获得飞行器的运动状态。
10.以上技术方案中优选的,所述步骤s4具体是:对观测空间目标进行n个连续时刻的序贯观测,获得天球坐标序列为;其中n为大于等于3的自然数;基于已知空间目标编目数据库中的空间目标轨道位置信息和飞行器的概略位置,生成预估观测天球坐标序列;其中1≤j≤a,j为空间目标在已知空间目标编目数据库中的编号,a为已知空间目标编目数据库中空间目标的总数;将天球坐标序列和由已知空间目标编目数据库中空间目标生成的预估观测天球坐标序列进行匹配,通过轨道关联识别出观测空间目标,进而获取观测空间目标的轨道位置信息。
11.以上技术方案中优选的,所述飞行器的概略位置由惯导提供。
12.以上技术方案中优选的,所述步骤s5中,导航系统模型包括状态模型和测量模型,其中基于观测空间目标的天球坐标序列及其轨道位置信息构建测量模型;利用无迹卡尔曼滤波算法获得飞行器的运动状态,其中,状态模型用于无迹卡尔曼滤波算法中的时间更新,测量模型用于无迹卡尔曼滤波算法中的测量更新。
13.以上技术方案中优选的,状态模型如下:设导航系统状态量为飞行器在地心惯性系下的位置和速度,记为,,则导航系统状态模型为:,其中,是由目标动力学特性决定的非线性函数,是动力学模型噪声;、和分别为飞行器k时刻在地心惯性系中的三轴位置坐标,、和分别为飞行器k时刻速度沿地心惯性系三轴的分量。
14.以上技术方案中优选的,测量模型如下:第k个时刻的导航观测量为空间目标天球坐标,记为,则测量模型为:
其中,和为观测噪声;为观测空间目标k时刻的赤经,为观测空间目标k时刻的赤纬;、和分别为观测空间目标k时刻在地心惯性系中的三轴位置坐标。
15.应用本发明的技术方案,具有以下有益效果:本发明的自主导航方法,每一时刻仅需对一个已编目空间目标进行观测,可降低对星敏感器性能指标的要求,从而大幅扩展了该自主导航方法的应用场景;由于导航信息源为已编目的空间目标,数量多,分布广,且光学信号不易被干扰,使得本发明的导航方法具有较高的可靠性和极强的自主性。
16.本发明中的自主导航方法,利用已知空间目标编目数据库中空间目标的预估观测天球坐标序列和观测空间目标的天球坐标序列匹配进行观测空间目标识别,进而从空间目标编目数据库中获取所观测空间目标的轨道信息;并根据单个已知空间目标的天球坐标序列,结合飞行器状态方程,对飞行器运动状态进行解算;本发明的方法无需进行包含空间目标和恒星的融合星图匹配,降低了导航解算的复杂度。
17.除了上面所描述的目的、特征和优点之外,本发明还有其它的目的、特征和优点。下面将参照图,对本发明作进一步详细的说明。
附图说明
18.构成本技术的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:图1是本发明自主导航方法的流程图;图2是仿真应用案例中飞行器的定位结果示意图。
具体实施方式
19.为了便于理解本发明,下面将对本发明进行更全面的描述,并给出了本发明的较佳实施例。但是,本发明可以以许多不同的形式来实现,并不限于本文所描述的实施例。相反地,提供这些实施例的目的是使对本发明的公开内容的理解更加透彻全面。
20.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。
21.实施例1:参见图1,一种基于已编目空间目标序贯观测的自主导航方法,包括以下步骤:步骤s1:利用星敏感器对单个已编目的空间目标进行序贯观测,根据观测图像获取观测的空间目标在星敏感器像平面的坐标;其中星敏感器搭载于飞行器上;具体的,观测空间目标在第k个时刻的星敏感器像平面坐标为,为水平
方向坐标,为垂直方向坐标,i代指像平面(image plane)。
22.步骤s2:利用观测图像中的背景恒星与恒星星表进行匹配,获得星敏感器光轴在惯性空间中的指向;具体的,星敏感器光轴k时刻在惯性空间中的指向为,为3
×
1维的单位方向矢量,s代指恒星(star)。
23.步骤s3:根据观测空间目标的像平面坐标和星敏感器光轴指向,计算观测空间目标的天球坐标;即:根据观测空间目标的像平面坐标、星敏感器光轴指向,计算出空间目标的天球坐标(具体计算方法请参见现有技术),记为,其中为观测空间目标k时刻的赤经,为观测空间目标k时刻的赤纬。
24.步骤s4:将一段观测时间内获取的观测空间目标的天球坐标序列,在已知空间目标编目数据库进行匹配,识别出该观测空间目标并获取其轨道位置信息;优选的,所述步骤s4具体是:对观测空间目标进行n个连续时刻的序贯观测,获得天球坐标序列为;其中n为大于等于3的自然数;基于已知空间目标编目数据库中的空间目标轨道位置信息和飞行器的概略位置,生成预估观测天球坐标序列;其中1≤j≤a,j为空间目标在已知空间目标编目数据库中的编号,a为已知空间目标编目数据库中空间目标的总数;将天球坐标序列和由已知空间目标编目数据库中空间目标生成的预估观测天球坐标序列进行匹配,通过轨道关联识别出观测空间目标(即获得观测空间目标的编号),进而获取观测空间目标的轨道位置信息。
25.因此,可以将观测空间目标在第k个时刻的位置记为,且;、和分别为观测空间目标k时刻在地心惯性系中的三轴位置坐标。
26.优选的, 所述飞行器的概略位置由惯导(即惯性导航)提供。
27.步骤s5:构建导航系统模型,利用滤波算法获得飞行器的运动状态。
28.具体的,所述步骤s5中,导航系统模型包括状态模型和测量模型,其中基于观测空间目标的天球坐标序列及其轨道位置信息构建测量模型;具体的,由于导航系统的状态方程和测量方程均为非线性,因此可以利用无迹卡尔曼滤波算法(unscented kalman filter, ukf)获得飞行器的运动状态(即估计出飞行器的位置和速度);其中,状态模型用于无迹卡尔曼滤波算法中的时间更新,测量模型用于无迹卡尔曼滤波算法中的测量更新。
29.进一步的,本实施例中状态模型(即状态方程)如下:设导航系统状态量为飞行器在地心惯性系下的位置和速度,记为,,则导航系统状态模型为:,
其中,是由目标动力学特性决定的非线性函数,是动力学模型噪声;、和分别为飞行器k时刻在地心惯性系中的三轴位置坐标,、和分别为飞行器k时刻速度沿地心惯性系三轴的分量。
30.进一步的,本实施例中测量模型(即测量方程)如下:第k个时刻的导航观测量为空间目标天球坐标,记为,则测量模型为:其中,和为观测噪声。
31.本领域人员知晓,无迹卡尔曼滤波算法为本领域的公知技术,例如申请号为cn201910784120.8的专利申请、《王建琦,曹喜滨,孙兆伟.基于ukf算法的航天器自主导航研究[j].飞行力学,2004(02):41-44.》、《李璟璟. 基于自适应ukf及位速测量辅助的大椭圆轨道卫星自主导航[d].哈尔滨工业大学,2012.》、《杨文博,李少远.基于强跟踪ukf的航天器自主导航间接量测滤波算法[j].系统工程与电子技术,2011,33(11):2485-2491.》以及《桂先洲,李志豪,黎胜亮.基于x射线脉冲星自主导航中ukf滤波算法的仿真研究[j].航天控制,2010,28(06):33-37.doi:10.16804/j.cnki.issn1006-3242.2010.06.008.》等现有技术文献均对无迹卡尔曼滤波算法进行了详细说明。因此,状态模型如何用于无迹卡尔曼滤波算法中的时间更新,测量模型如何用于无迹卡尔曼滤波算法中的测量更新,本实施例中无需进行详细说明。
[0032]
优选的,本领域人员可以理解,受空间目标可见性的影响,因此需要不断更换观测空间目标,并重复步骤s1-步骤s5才能实现持续获得飞行器的运动状态。本实施例中观测的空间目标为卫星。
[0033]
进一步的,本实施例还提供了上述自主导航方法的仿真应用案例,详情如下:(1)仿真条件假设飞行器初始位置为[-4397.647km;
ꢀ‑
4091.423km;
ꢀ‑
2652.718km],初始速度为[-6.135km/s; 3.492km/s; 2.264km/s],初始位置误差为[50km; 50km; 50km],初始速度误差为[5m/s; 5m/s; 5m/s]。飞行器所搭载星敏感器测角误差为0.5角秒,空间目标星历三轴位置误差均为50m。星敏感器依次对三个低轨空间目标进行观测,观测计划如表1所示,各空间目标的初始轨道根数如表2所示。
[0034]
表1 空间目标观测计划表2 空间目标初始轨道根数
(2)仿真应用案例中ukf滤波计算流程如下:
①
滤波初始化设k-1时刻系统状态变量和相应方差矩阵的初值为和。
[0035]
②
构造sigma采样点和权重通过比例对称采样来构造sigma点集合集合其中,n是系统的状态量维数,,,;为的cholesky因子的第行。相应的权重系数取为:其中,的取值与状态先验分布有关。若系统状态的分布为高斯,则。
[0036]
③
时间更新时间更新是指根据系统前一时刻的状态,根据状态方法,对系统当前时刻的状态进行预测。
[0037][0037]
为状态预测值。
[0038][0038]
为预估测量量,由测量方程计算得到。
[0039]
④
量测更新测量更新是指利用当前时刻的实际测量值(来自于传感器)以及预估测量值,对系统当前时刻的预测状态进行修改,并最终得到当前时刻系统状态的估计值。
[0040]040]040]
(3)仿真结果飞行器定位结果如图2,由图可知,本实施例中的导航方法的位置估计误差小于100m,可为临近空间飞行器提供高精度的自主导航服务。
[0041]
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。