1.本发明涉及播种装置技术领域,具体领域为一种便携式南瓜种子连续型播种装置。
背景技术:
2.南瓜是一年生蔓生草本植物,农民在播种植南瓜种子时,一些南瓜种植地块无法使用大型播种机,以及面积较小地块不想雇佣过多人力,而人工播种需要不断弯腰,费时费力。
技术实现要素:
3.本发明的目的在于提供一种便携式南瓜种子连续型播种装置,可单人操作连续单粒播种,不用弯腰即走即种,省时省力且操作简单。
4.为实现上述目的,本发明采用的技术方案是:一种便携式南瓜种子连续型播种装置,包括第一壳体,所述第一壳体的内部上侧设有进料仓,所述第一壳体的内部下侧设有第一腔室,所述第一腔室通过管径与所述进料仓连通连接,所述第一腔室内设有种盘,所述种盘与转轴固定连接,所述第一壳体的底部设有出料管;所述第一壳体的后侧设有第二壳体,所述第一壳体的内部下侧设有第二腔室,所述第二腔室和所述第一腔室连通连接,所述第二腔室内设有棘轮,所述棘轮与所述转轴固定连接,所述转轴的第一端部与所述第一腔室的内壁转动连接,所述转轴的第二端部与所述第二腔室的内壁转动连接;所述第二壳体的顶面且位于所述第二腔室的一侧设有竖直的第三腔室,所述第三腔室与所述第二腔室连通连接,所述第三腔室内设有插杆,所述插杆的顶部高于所述第二壳体的顶面,所述插杆的底部与所述第三腔室的底面之间设有第一弹簧,所述插杆的侧壁上设有凹槽,所述凹槽内设有驱动棘爪,所述驱动棘爪的顶部与所述凹槽的内壁转动连接,所述驱动棘爪的底部与所述凹槽的内壁之间设有第二弹簧,所述第二壳体的内部且位于所述第二腔室的另一侧设有第四腔室,所述第四腔室与所述第三腔室连通连接,所述第四腔室内设有制动棘爪,所述制动棘爪的底部与所述第四腔室的内壁转动连接,所述制动棘爪的上方设有片簧。
5.优选的,所述种盘包括盘体和挡片,所述盘体的侧壁上设有若干分料仓,若干所述分料仓均匀分布且间距相等,每一所述分料仓仅可容纳一粒种子,所述挡片位于所述盘体的前侧,且与所述盘体固定连接,所述挡片由透明材料制成,所述第一壳体前表面的底部设有观察窗。
6.优选的,所述进料仓的顶部设有仓盖,所述仓盖上设有锁扣。
7.优选的,所述第二壳体的顶部设有握把,所述握把上设有通槽,所述插杆设在所述通槽内,所述插杆的顶部高于所述握把的顶面。
8.优选的,所述出料管的底部设有出料嘴,所述出料嘴包括第一尖嘴和第二尖嘴,所述第一尖嘴的顶部与所述出料管的底部固定连接,所述第二尖嘴的顶部与所述出料管的底部铰接。
9.优选的,所述握把的底部与所述第二壳体的顶面之间设有连接柱,所述连接柱上设有拉板,所述拉板可沿所述连接柱的侧壁上下滑动,所述拉板上设有第三弹簧,所述第三弹簧套设在所述连接柱的外表面,所述第三弹簧的顶部与所述握把固定连接,所述第三弹簧的底部与所述拉板固定连接;所述第二壳体的顶面设有第一滑轮和第二滑轮,所述第二壳体的底部设有第三滑轮,所述出料管上设有第四滑轮,所述拉板的底面与拉绳的第一端部固定连接,所述拉绳的第二端部依次穿过所述第一滑轮的内侧、所述第二滑轮的外侧,所述第三滑轮的外侧和所述第四滑轮的内测,最后与所述第二尖嘴的外侧壁固定连接,所述第一尖嘴和所述第二尖嘴之间设有第四弹簧。
10.优选的,所述出料管上设有转动板,所述转动板的第一端部与所述出料管的外侧壁铰接,所述转动板的第二端部设有定位杆。
11.优选的,所述定位杆上设有方洞,所述方洞的两端分别设有第一横杆和第二横杆,所述方洞内设有限位板,所述限位板的两端分别设有第一挂钩和第二挂钩,所述出料管的侧壁上设有挂环。
12.使用本发明的有益效果是:本发明可单人操作连续单粒播种,不用弯腰即走即种,省时省力且操作简单。不仅具有便携性,并且无需开沟,播种距离可控,不论老少均可独立操作,适用于各种地形地貌的南瓜种子播种工作。
附图说明
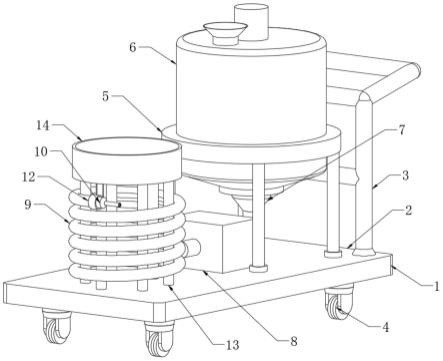
13.图1为本发明一个角度的轴测图;图2为本发明另一个角度的轴测图;图3为图2中a处的放大图;图4为本发明中第一壳体一个角度的轴测图;图5为本发明中第一壳体另一个角度的轴测图;图6为本发明中第一壳体的主视剖视图;图7为本发明中第二壳体的轴测图;图8为本发明中第二壳体的主视剖视图;图9为图8中b处的放大图;图10为本发明中种盘一个角度的轴测图;图11为本发明中种盘另一个角度的轴测图;图12为本发明中种盘的爆炸图;图13为本发明中第一尖嘴和第二尖嘴紧贴时的右视剖视图;图14为本发明中第一尖嘴和第二尖嘴分离时的右视剖视图;图15为本发明使用定位杆时的轴测图;图16为图15中c处的放大图。
14.附图标记包括:1、第一壳体,101、进料仓,102、第一腔室,103、管径,2、种盘,201、盘体,202、挡片,203、分料仓,3、转轴,4、出料管,5、第二壳体,501、第二腔室,502、第三腔室,503、第四腔室,6、棘轮,7、插杆,701、凹槽,8、第一弹簧,9、驱动棘爪,10、第二弹簧,11、制动棘爪,12、片簧,
13、观察窗,14、仓盖,15、锁扣,16、握把,1601、通槽,17、出料嘴,1701、第一尖嘴,1702、第二尖嘴,18、连接柱,19、拉板,20、第三弹簧,21、第一滑轮,22、第二滑轮,23、第三滑轮,24、第四滑轮,25、拉绳,26、第四弹簧,27、转动板,2701、方洞,28、定位杆,29、第一横杆,30、第二横杆,31、限位板,32、第一挂钩,33、第二挂钩,34、挂环。
具体实施方式
15.为使本技术方案的目的、技术方案和优点更加清楚明了,下面结合具体实施方式,对本技术方案进一步详细说明。应该理解,这些描述只是示例性的,而不是要限制本技术方案的范围。
16.请参阅图1-16,本发明提供一种技术方案:一种便携式南瓜种子连续型播种装置,包括第一壳体1,请参阅图6,第一壳体1的内部上侧设有进料仓101,第一壳体1的内部下侧设有第一腔室102,第一腔室102在第一壳体1的后表面的位置为敞口,第一腔室102通过管径103与进料仓101连通连接,管径103的横切面可根据实际需要设定成不同的形状,在本实施例中,管径103的横切面为矩形,第一腔室102内设有种盘2,种盘2与转轴3固定连接,第一壳体1的底部设有出料管4,出料管4与第一腔室102连通连接;第一壳体1的后侧设有第二壳体5,第二壳体5与第一壳体1可拆卸连接。请参阅图8-12,第一壳体1的内部下侧设有第二腔室501,第二腔室501和第一腔室102连通连接,第二腔室501内设有棘轮6,棘轮6与转轴3固定连接,转轴3的第一端部与第一腔室102的内壁转动连接,转轴3的第二端部与第二腔室501的内壁转动连接。第二壳体5的顶面且位于第二腔室501的一侧设有竖直的第三腔室502,第三腔室502与第二腔室501连通连接。第三腔室502内设有插杆7,插杆7的顶部高于第二壳体5的顶面,插杆7的底部与第三腔室502的底面之间设有第一弹簧8,插杆7的侧壁上设有凹槽701,凹槽701内设有驱动棘爪9,驱动棘爪9的顶部与凹槽701的内壁转动连接,驱动棘爪9的底部与凹槽701的内壁之间设有第二弹簧10。第二壳体5的内部且位于第二腔室501的另一侧设有第四腔室503,第四腔室503与第三腔室502连通连接,第四腔室503内设有制动棘爪11,制动棘爪11的底部与第四腔室503的内壁转动连接,制动棘爪11的上方设有片簧12,片簧12的一端与第四腔室503的内壁固定连接。种盘2包括盘体201和挡片202,种盘2的大小可根据实际需要制作成不同的尺寸,种盘2为更换零部件,盘体201的侧壁上设有若干分料仓203,分料仓203的顶部为敞口,若干分料仓203均匀分布且间距相等,每一分料仓203仅可容纳一粒种子,挡片202位于盘体201的前侧,且与盘体201固定连接,挡片202由透明材料制成,分料仓203的前侧为开口,因此从前侧透过挡片202可以观察到分料仓203里面的情况,第一壳体1前表面的底部设有观察窗13。棘轮每转动一次,种盘2就转动一次,每次转动位于最上方的分料仓203就会对准管径103的底部开口、位于最下方的分料仓203就会对准出料管4的顶部开口。进料仓101的顶部设有仓盖14,仓盖14上设有锁扣15。
17.本发明在使用时,先打开仓盖14,将若干南瓜种子放入进料仓101中,然后关闭仓盖14并锁好锁扣15,这样在播种过程中仓盖14不会打开,里面的南瓜种子不会洒出来。进料仓101中的南瓜种子进入管径103中向下掉落并落到盘体201上的分料仓203内,由于每一分料仓203仅可容纳一粒种子,多余的种子会先在管径103中堆积。接下来向下按动插杆7的顶部,插杆7在第三腔室502内向下滑动,插杆7的底部压缩第一弹簧8,第一弹簧8储存弹性势能。插杆7带动驱动棘爪9向下移动,驱动棘爪9插入棘轮6的齿槽中带动棘轮6旋转,此时制
动棘爪11在棘轮6的齿背上滑动并挤压片簧12,片簧12储存弹性势能。当棘轮6转动一个齿后,棘轮6带动盘体201旋转,已经进入种子的分料仓203向左移动,一个空的分料仓203对准管径103的底部开口,并进入一个南瓜种子。此时第一弹簧8不能被压缩,插杆7的底部到达最低点,片簧12释放弹性势能,制动棘爪11进入齿槽中卡住棘轮6,棘轮6不能旋转。接下来停止按压插杆7,第一弹簧8释放弹性势能带动插杆7向上移动,驱动棘爪9与棘轮6的齿接触,由于此时棘轮6不能旋转,驱动棘爪9在向上移动的过程中会绕顶部并被棘轮6顶入凹槽701中,这个过程会压缩第二弹簧10,第二弹簧10储存弹性势能,当第一弹簧8完全伸长并复位时,第二弹簧10释放弹性势能推动驱动棘爪9的底部向外移动,驱动棘爪9复位。重复上述操作,直到盘体201左侧的若干分料仓203内均有一个南瓜种子。接下来将出料管4的底部插入土壤中,重新进行上述操作,此时盘体201左侧一个有种子的分料仓203会对准出料管4的顶部开口,并顺着出料管4的内部落入土壤中,这就完成了一粒南瓜种子的播种。然后只需将出料管4的底部插入土壤的另一位置,重复上述操作即可实现连续单粒播种。由于第一壳体1前表面的底部设有观察窗13,盘体201的旋转以及种子掉落的过程,都可以通过观察窗13观察到。
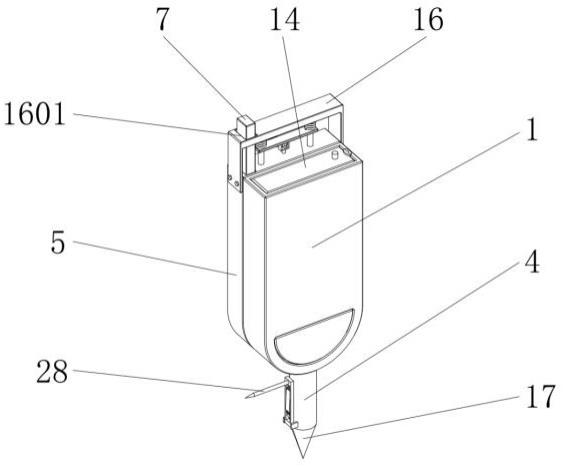
18.请参阅图1,第二壳体5的顶部设有握把16,握住握把16可以方便的将本发明提起,将出料管4的底部插入土壤中时也是通过握住握把16完成的,不仅具有便携性,还可以实现不用弯腰即走即种。握把16上设有通槽1601,插杆7设在通槽1601内,插杆7的顶部高于握把16的顶面,这样握住握把16时也可以通过大拇指按压插杆7的顶部。请参阅图13-14,出料管4的底部设有出料嘴17,出料嘴17包括第一尖嘴1701和第二尖嘴1702,第一尖嘴1701和第二尖嘴1702紧贴,并由于底部是尖头所以能让出料管4更容易插入土壤内。第一尖嘴1701的顶部与出料管4的底部固定连接,第二尖嘴1702的顶部与出料管4的底部铰接。南瓜种子在出料管4的内部向下掉落会掉落至第一尖嘴1701和第二尖嘴1702之间,由于第二尖嘴1702的顶部与出料管4的底部铰接,当第二尖嘴1702转动与第一尖嘴1701分离时,南瓜种子才会落入土壤内。
19.请参阅图2-3,握把16的底部与第二壳体5的顶面之间设有连接柱18,连接柱18上设有拉板19,拉板19可沿连接柱18的侧壁上下滑动,连接柱18有两个,分别位于拉板19的两侧,这样可以使拉板19上下滑动的过程更加稳定,拉板19上设有第三弹簧20,第三弹簧20套设在连接柱18的外表面,第三弹簧20的顶部与握把16固定连接,第三弹簧20的底部与拉板19固定连接;第二壳体5的顶面设有第一滑轮21和第二滑轮22,第二壳体5的底部设有第三滑轮23,出料管4上设有第四滑轮24,拉板19的底面与拉绳25的第一端部固定连接,拉绳25的第二端部依次穿过第一滑轮21的内侧、第二滑轮22的外侧,第三滑轮23的外侧和第四滑轮24的内测,最后与第二尖嘴1702的外侧壁固定连接,第一尖嘴1701和第二尖嘴1702之间设有第四弹簧26,第四弹簧26有两个,两端分别与第一尖嘴1701和第二尖嘴1702固定连接,分别位于第一尖嘴1701和第二尖嘴1702内部的两侧,这样当南瓜种子向下掉落时不会被第四弹簧26卡住,第四弹簧26会拉动第一尖嘴1701和第二尖嘴1702,使之保持紧贴的状态。
20.当出料管4插进土壤中时,第一尖嘴1701和第二尖嘴1702紧贴,此时只需用手从下方向上提起拉板19,拉板19压缩第三弹簧20,第三弹簧20储存弹性势能。此时拉板19带动拉绳25的第一端部上升,拉绳25的第二端部拉动第二尖嘴1702绕出料管4的底部旋转,第二尖嘴1702转动与第一尖嘴1701分离,第四弹簧26被拉伸储存弹性势能,南瓜种子会落入土壤
内完成播种。接下来松开拉板19,第四弹簧26释放弹性势能带动第二尖嘴1702转动重新紧贴第一尖嘴1701,第三弹簧20释放弹性势能带动拉板19复位。
21.请参阅图1、图15-16,出料管4上设有转动板27,转动板27的第一端部与出料管4的外侧壁铰接,转动板27的第二端部设有定位杆28,定位杆28与转动板27固定连接,定位杆28的底部为尖头。定位杆28上设有方洞2701,方洞2701的两端分别设有第一横杆29和第二横杆30,方洞2701内设有限位板31,限位板31的两端分别设有第一挂钩32和第二挂钩33,出料管4的侧壁上设有挂环34。
22.在未使用本发明时,转动板27保持竖直,定位杆28保持水平,限位板31通过第一挂钩32挂在第一横杆29上,此时转动板27为收纳状态。使用本发明,在将出料管4的底部插入土壤中前,可以旋转转动板27至水平,将限位板31摘下,并将第一挂钩32挂在挂环34上,第二挂钩33挂在第二横杆30上,形成三角形结构。此时在握住握把16将出料管4的底部插入土壤中时,定位杆28的底部会同步插入土壤中,在土壤上打上一个定点,这就确定了下一个播种的位置。
23.本发明可单人操作连续单粒播种,不用弯腰即走即种,省时省力且操作简单。不仅具有便携性,并且无需开沟,播种距离可控,不论老少均可独立操作,适用于各种地形地貌的南瓜种子播种工作。
24.工作原理:本发明在使用时,先打开仓盖14,将若干南瓜种子放入进料仓101中,然后关闭仓盖14并锁好锁扣15。进料仓101中的南瓜种子进入管径103中向下掉落并落到盘体201上的分料仓203内,由于每一分料仓203仅可容纳一粒种子,多余的种子会先在管径103中堆积。接下来向下按动插杆7的顶部,当棘轮6转动一个齿后,一个空的分料仓203对准管径103的底部开口,并进入一个南瓜种子。此时第一弹簧8不能被压缩,插杆7的底部到达最低点,接下来第一弹簧8释放弹性势能带动插杆7向上移动复位,第二弹簧10释放弹性势能推动驱动棘爪9的底部向外移动,驱动棘爪9复位。重复上述操作,直到盘体201左侧的若干分料仓203内均有一个南瓜种子。接下来将出料管4的底部插入土壤中,重新进行上述操作,此时盘体201左侧一个有种子的分料仓203会对准出料管4的顶部开口,种子顺着出料管4的内部向下掉落会掉落至第一尖嘴1701和第二尖嘴1702之间。此时只需用手从下方向上提起拉板19,拉板19带动拉绳25的第一端部上升,拉绳25的第二端部拉动第二尖嘴1702绕出料管4的底部旋转,第二尖嘴1702转动与第一尖嘴1701分离,南瓜种子会落入土壤内完成播种。接下来松开拉板19,第四弹簧26释放弹性势能带动第二尖嘴1702转动重新紧贴第一尖嘴1701,第三弹簧20释放弹性势能带动拉板19复位。
25.以上内容仅为本发明的较佳实施例,对于本领域的普通技术人员,依据本技术内容的思想,在具体实施方式及应用范围上可以作出许多变化,只要这些变化未脱离本发明的构思,均属于本专利的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。