1.本技术涉及人工瓣膜输送医疗器械领域,尤其涉及一种人工瓣膜脱钩机构及输送装置。
背景技术:
2.患者的主动脉瓣环膨胀等生理结构变化会造成主动脉瓣膜无法完全闭合,从而导致反流病变。主动脉瓣膜的瓣叶和瓣环均为柔软结构,而且发生病变后还可能进一步持续扩张,无法提供足够的支撑力来固定人工瓣膜产品,因此需要将人工瓣膜的支架膨胀固定至主动脉窦底。通常采用球囊扩张式人工瓣膜或自膨胀式人工瓣膜,其中自膨胀式人工瓣膜的输送装置更加简单,形状保持性能更好,但是对定位的准确性要求更高。
3.为此,申请人的公开号为cn114767334a的发明专利申请公开了一种心脏瓣膜释放机构,通过控制1个导管释放人工瓣膜的近端,再通过控制2个导管使人工瓣膜的近端脱钩;通过控制1个导管释放人工瓣膜的远端,再通过2个导管控制人工瓣膜的远端脱钩,总共需要6个依次套设的导管或导杆来实现人工瓣膜的精准定位、释放和解脱,结构和操作均较复杂。
技术实现要素:
4.针对现有技术存在的以上不足之处,本技术的目的在于提供一种结构和操作更加简单的人工瓣膜脱钩机构,以及基于该脱钩机构的人工瓣膜输送装置。
5.为了实现上述目的,本技术提供了以下技术方案。
6.一种人工瓣膜脱钩机构,用于在人工瓣膜输送装置中装载人工瓣膜,并在患者体内使所述人工瓣膜脱钩,所述人工瓣膜为自膨胀式并具有至少1个远端挂钩和至少1个近端挂钩,其特征在于,包括:远端脱钩机构,用于保持所述远端挂钩并使之适时脱钩;近端脱钩机构,适于连接至所述人工瓣膜输送装置的近端释放控制机构,用于保持所述近端挂钩并使之适时脱钩;其中,所述远端脱钩机构包括:引导头,固定连接至所述人工瓣膜输送装置的第一导管;套管,固定连接至所述引导头;远端钩挂件,固定连接至所述人工瓣膜输送装置的第二导管,用于挂设所述远端挂钩;其中,在所述远端脱钩机构的保持状态,所述套管套设于所述远端钩挂件上,将所述远端挂钩约束于挂设状态,并将所述人工瓣膜远端保持在径向收缩状态;通过控制所述第一导管和/或所述第二导管使所述套管相对于所述远端钩挂件向远端移动,使所述套管对所述远端挂钩的约束消失,从而使所述远端挂钩脱钩。
7.在一些实施方式中,所述远端钩挂件具有:第一导管过孔,用于滑动穿设所述第一导管;第一环形凹槽,周向设置于外表面;至少1个第一轴向凹槽,轴向设置于所述第一环形凹槽的近端,并与所述第一环形凹槽构成t字形凹槽结构,从而适于挂设所述远端挂钩,对挂设状态的所述远端挂钩实现轴向限位。
8.在一些实施方式中,所述引导头包括固定连接的引导部、套管连接部、第一导管连接部;所述引导部的径向尺寸从近端向远端单调缩小;所述套管连接部位于所述引导部的
近端,具有轴肩结构,所述套管固定至所述轴肩结构;所述第一导管连接部位于近端,包括连接管,适于所述第一导管穿设固定。
9.在一些实施方式中,所述套管的近端包括第一引导段,所述第一引导段的孔径自近端向远端单调缩小;所述第一引导段用于所述套管相对于所述远端钩挂件向远端移动时使所述人工瓣膜平稳膨胀和所述远端挂钩平稳脱钩,以及用于所述套管相对于所述远端钩挂件向近端移动时使所述人工瓣膜平稳收缩。
10.在一些实施方式中,所述人工瓣膜包括依次连接的瓣膜支架、连接部和定位支架,所述瓣膜支架包括所述远端挂钩,所述定位支架包括所述近端挂钩;所述连接部可变形,使所述瓣膜支架相对于所述定位支架可轴向移动;所述人工瓣膜输送装置将所述人工瓣膜输送到患者体内的目标位置后,所述近端脱钩机构释放所述定位支架,使所述定位支架定位于所述目标位置;所述人工瓣膜输送装置通过控制所述第一导管和所述第二导管,使所述瓣膜支架沿轴向移动至设定位置后,所述远端脱钩机构释放所述瓣膜支架。
11.在一些实施方式中,所述近端脱钩机构包括依次套设于所述第二导管外的第三导管、第四导管和第五导管,以及第一弯曲爪和第二弯曲爪;所述第一弯曲爪固定连接至所述第三导管的远端,所述第二弯曲爪固定连接至所述第四导管的远端;所述第一弯曲爪包括至少2个具有弹性的第一爪臂,所述第二弯曲爪包括至少2个具有弹性的第二爪臂,所述第一爪臂和所述第二爪臂配对设置且其中一个的远端适于挂设所述近端挂钩、另一个的远端适于将所述近端挂钩约束于挂设状态并在所述第三导管和所述第四导管相对滑动时解除约束;在自然状态,所述第一爪臂和所述第二爪臂均具有自近端向远端单调外扩的扩展段,所述第五导管的远端具有第二引导段,所述第二引导段的孔径自远端向近端单调缩小;所述第二引导段用于所述第五导管相对于所述第三导管和所述第四导管向远端移动时使所述第一弯曲爪和所述第二弯曲爪平稳收缩至第五导管内,以及用于所述第五导管相对于所述第三导管和所述第四导管向近端移动时使所述第一弯曲爪和所述第二弯曲爪平稳扩张。
12.在一些实施方式中,所述近端脱钩机构包括依次套设于所述第二导管外的第三导管和第五导管;所述第三导管的远端具有周向设置于外表面的第二环形凹槽,和至少1个第二轴向凹槽,所述第二轴向凹槽轴向设置于所述第二环形凹槽的远端,并与所述第二环形凹槽构成t字形凹槽结构,从而适于挂设所述近端挂钩,对挂设状态的所述近端挂钩实现轴向限位;所述第五导管的远端具有第二引导段,所述第二引导段的孔径自远端向近端单调缩小;所述第二引导段用于所述第五导管相对于所述第三导管向近端移动时使所述定位支架平稳膨胀和所述近端挂钩平稳脱钩,以及用于所述第五导管相对于所述第三导管向远端移动时使所述定位支架平稳收缩。
13.在一些实施方式中,所述近端脱钩机构包括套设于所述第二导管外的第五导管;所述第二导管具有周向设置于外表面的第三环形凹槽,和至少1个第三轴向凹槽,所述第三轴向凹槽轴向设置于所述第三环形凹槽的远端,并与所述第三环形凹槽构成t字形凹槽结构,从而适于挂设所述近端挂钩,对挂设状态的所述近端挂钩实现轴向限位;所述第五导管的远端具有第二引导段,所述第二引导段的孔径自远端向近端单调缩小;所述第二引导段用于所述第五导管相对于所述第二导管向近端移动时使所述定位支架平稳膨胀和所述近端挂钩平稳脱钩,以及用于所述第五导管相对于所述第二导管向远端移动时使所述定位支架平稳收缩。
14.本技术还提供了一种人工瓣膜输送装置,包括:前述的任一种人工瓣膜脱钩机构;握持部,用于操作者握持;第一控制机构,连接所述第一导管,用于控制所述第一导管相对于所述第二导管轴向滑动;第二控制机构,连接所述第二导管和所述第一控制机构,用于控制所述第一导管和所述第二导管同时轴向滑动;近端释放控制机构,连接至所述近端脱钩机构,用于控制所述近端脱钩机构释放所述近端挂钩;其中,所述第一控制机构和所述第二控制机构构成远端释放控制机构,用于控制所述远端脱钩机构释放所述远端挂钩,所述近端释放控制机构和所述远端释放控制机构连接至所述握持部。
15.在一些实施方式中,所述第一控制机构包括第一壳体、第一旋钮、第一滑动螺纹件;所述第二控制机构包括第二旋钮、第二滑动螺纹件;其中,所述第一壳体具有轴向延伸的第一腔体和第一凹槽;所述第一旋钮周向旋转设置于所述第一凹槽内;所述第一凹槽的底部开设有轴向延伸的第一贯通槽,所述第一滑动螺纹件适于沿所述第一贯通槽轴向滑动;所述第一滑动螺纹件和所述第一旋钮分别具有匹配的外螺纹和内螺纹,使所述第一旋钮旋转时驱动所述第一滑动螺纹件轴向滑动;所述第一导管的近端在所述第一腔体内与所述第一滑动螺纹件固定。
16.所述近端释放控制机构包括第三壳体,所述第三壳体具有第三腔体,所述第一壳体的远端轴向滑动设置于所述第三壳体的近端;所述第三壳体具有第二凹槽或所述第三壳体的近端与所述第一壳体的远端共同构成第二凹槽,所述第二旋钮周向旋转设置于所述第二凹槽内;所述第二凹槽的底部开设有轴向延伸的第二贯通槽,所述第二滑动螺纹件适于沿所述第二贯通槽轴向滑动;所述第二滑动螺纹件和所述第二旋钮分别具有匹配的外螺纹和内螺纹,使所述第二旋钮旋转时驱动所述第二滑动螺纹件轴向滑动;所述第二滑动螺纹件固定连接至所述第一壳体,所述第二导管的近端固定连接至所述第二滑动螺纹件;所述第三壳体的远端连接至所述握持部的近端。
17.在一些实施方式中,所述近端释放控制机构包括第三控制机构;所述第三控制机构包括所述第三壳体、第三旋钮和第三滑动螺纹件,所述第三壳体具有第三腔体和第三凹槽,所述第三旋钮周向旋转设置于所述第三凹槽内,所述第三凹槽的底部开设有轴向延伸的第三贯通槽,所述第三滑动螺纹件和所述第三旋钮分别具有匹配的外螺纹和内螺纹,使所述第三旋钮旋转时驱动所述第三滑动螺纹件轴向滑动;所述近端脱钩机构的第三导管的近端固定连接至所述第三滑动螺纹件;所述近端脱钩机构的第四导管的近端固定连接至所述第三壳体。
18.在一些实施方式中,还包括第四控制机构;所述第四控制机构包括第四壳体、第四旋钮和第四滑动螺纹件,所述第四壳体的近端固定连接至所述握持部的远端,所述第四壳体具有第四腔体和第四凹槽,所述第四旋钮周向旋转设置于所述第四凹槽内;所述第四凹槽的底部开设有轴向延伸的第四贯通槽,所述第四滑动螺纹件和所述第四旋钮分别具有匹配的外螺纹和内螺纹,使所述第四旋钮旋转时驱动所述第四滑动螺纹件轴向滑动;所述近端脱钩机构的第五导管的近端固定连接至所述第四滑动螺纹件。
19.在一些实施方式中,所述近端释放控制机构还包括第五控制机构,所述第五控制机构包括第五壳体、第五旋钮和第五滑动螺纹件;所述第五壳体具有第五腔体和第五凹槽,所述第五旋钮周向旋转设置于所述第五凹槽内;所述第五凹槽的底部开设有轴向延伸的第五贯通槽,所述第五滑动螺纹件和所述第五旋钮分别具有匹配的外螺纹和内螺纹,使所述
第五旋钮旋转时驱动所述第五滑动螺纹件轴向滑动;所述第五导管为可控弯管,所述第五导管包括控弯拉索,所述控弯拉索的近端连接至所述第五滑动螺纹件,所述控弯拉索的远端连接至所述可控弯管的远端;所述第五壳体的近端固定连接至所述第四滑动螺纹件。
20.在一些实施方式中,所述第三壳体的远端和所述握持部的近端通过螺纹连接,使所述第三壳体和所述第一壳体可整体相对于所述握持部沿轴向旋转。
21.本技术还提供了一种人工瓣膜定位方法,用于通过人工瓣膜输送装置将自膨胀式的人工瓣膜输送并释放至患者的主动脉窦底,所述人工瓣膜包括依次连接的瓣膜支架、连接部和定位支架,所述瓣膜支架包括远端挂钩,所述定位支架包括近端挂钩;所述连接部可变形,使所述瓣膜支架相对于所述定位支架可轴向移动;所述人工瓣膜输送装置包括前述的任一种人工瓣膜脱钩机构。
22.定位方法包括步骤:将所述近端挂钩挂设并保持至所述近端脱钩机构,将所述远端挂钩挂设并保持至所述远端脱钩机构,使所述人工瓣膜径向收缩保持于所述人工瓣膜脱钩机构;在影像导航下通过动脉入路将所述人工瓣膜输送至主动脉窦底;控制所述人工瓣膜脱钩机构整体沿轴向旋转,使所述人工瓣膜和患者的原生瓣膜周向位置匹配;定位支架释放步骤,通过控制所述近端脱钩机构将所述定位支架释放,从而使之径向膨胀定位至主动脉窦底;控制所述瓣膜支架向近端移动,使之到达膨胀后的定位支架内部的设定位置,使所述原生瓣膜位于所述瓣膜支架和所述定位支架之间;瓣膜支架释放步骤,通过控制所述套管向远端移动,将所述瓣膜支架释放并脱钩,从而使之径向膨胀定位至所述定位支架内,并将所述原生瓣膜压紧至所述定位支架;控制所述近端脱钩机构将定位支架脱钩;将所述远端脱钩机构从膨胀后的瓣膜支架内向近端移动收回。
23.在一些实施方式中,所述人工瓣膜输送装置的人工瓣膜脱钩机构包括第一弯曲爪和第二弯曲爪;在所述定位支架释放步骤中,如果释放后的定位支架的位置不合适,则通过控制所述第五导管向远端移动,将所述定位支架径向压缩回收至所述第五导管内,并将所述定位支架调整位置后重新释放;在所述瓣膜支架释放步骤中,如果释放过程中的瓣膜支架的位置不合适,则通过控制所述套管向近端移动,将所述瓣膜支架径向压缩回收至所述套管内,并将所述瓣膜支架调整位置后重新释放。
24.在一些实施方式中,所述定位支架包括倒刺,所述瓣膜支架将所述原生瓣膜压紧至所述定位支架后,所述倒刺刺入所述原生瓣膜。
25.本技术的各个实施例具有以下技术效果中的至少一种:
26.1.通过将远端脱钩机构的套管固定至引导头,并套设至人工瓣膜的远端和远端钩挂件之外,从而在套管向远端移动时同时用于释放人工瓣膜的远端和远端挂钩的脱钩,简化了远端脱钩机构,可将现有技术中的6个导管或导杆减少至5个;
27.2.通过在近端脱钩机构采用类似于远端脱钩机构的t形槽等结构,并将第五导管同时用于释放人工瓣膜的近端和近端挂钩的脱钩,简化了远端脱钩机构,可将现有技术中的6个导管或导杆减少至4个或者3个;
28.3.通过在套管和第五导管设置引导段,使人工瓣膜可以更加平稳地收缩、膨胀和脱钩;
29.4.通过人工瓣膜的近端和远端的可回收设置,使人工瓣膜的定位可以更加精确;
30.5.通过旋钮控制各个导管的移动,使输送装置结构紧凑、操作方便,使人工瓣膜的
定位更加精确、释放和脱钩更加平稳;
31.6.通过类似的结构设置输送装置的多个控制机构,使各个控制机构可以使用多个相同的零件,降低了输送装置的总体成本;
32.7.通过首先将人工瓣膜的定位支架准确定位,再移动瓣膜支架至定位支架内部,将原生瓣膜夹紧于定位支架和瓣膜支架之间,保证了定位的准确性和可靠性。
附图说明
33.下面将以明确易懂的方式,结合附图说明优选实施方式,对本发明的上述特性、技术特征、优点及其实现方式予以进一步说明。
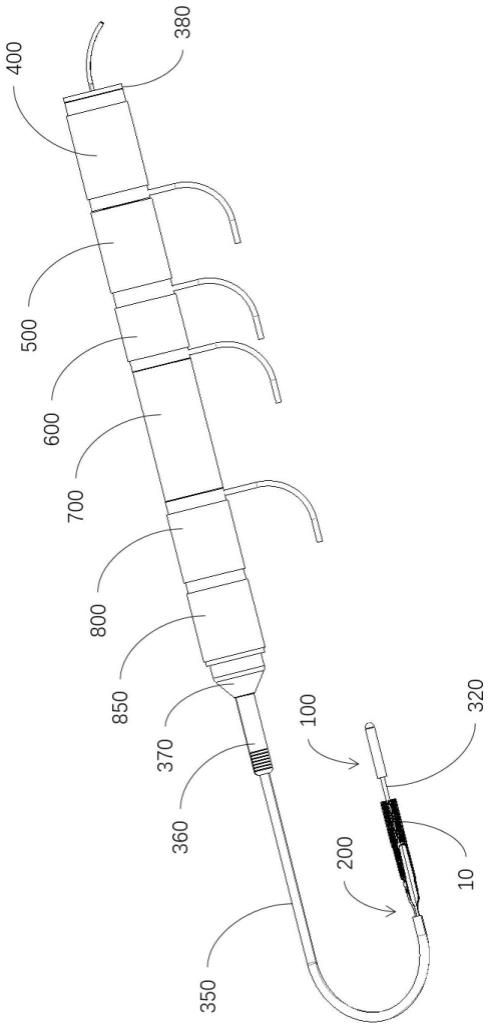
34.图1是本技术的人工瓣膜输送装置的一个实施例的示意图;
35.图2是图1实施例的内部结构示意图;
36.图3是一种人工瓣膜10的压缩状态示意图;
37.图4是图3的人工瓣膜10的使用状态示意图;
38.图5是图3的人工瓣膜10的定位支架13膨胀后的状态示意图;
39.图6是图3的人工瓣膜10的定位支架13完成定位后的状态示意图;
40.图7是在图6基础上完成瓣膜支架11定位后的状态示意图;
41.图8是图1实施例的远端脱钩机构100部分结构示意图;
42.图9是图8中的引导头110的爆炸图;
43.图10是图8中的远端钩挂件130的侧视图;
44.图11是图10的立体图;
45.图12是图1实施例的近端脱钩机构200的部分结构示意图;
46.图13是图12中的第一弯曲爪230的爆炸图;
47.图14是图12中的第二弯曲爪240的爆炸图;
48.图15是一个实施例的套管120的剖视图;
49.图16是本技术的人工瓣膜脱钩机构的一个实施例的结构示意图;
50.图17是图1实施例的第一控制机构400和第二控制机构500的内部结构示意图;
51.图18是图17中的第一壳体410的部分结构立体图;
52.图19是图17中的第一滑动螺纹件430的结构示意图;
53.图20是图19中的第一导管固定件431的立体图;
54.图21是图17中的第一旋钮420的部分结构示意图;
55.图22是图1实施例的第三控制机构600的内部结构及部分相关结构的示意图;
56.图23是图22中的第三壳体610的部分结构示意图;
57.图24是图22中的握持部700的部分结构示意图;
58.图25是图22中的第三滑动螺纹件630及部分相关结构的示意图;
59.图26是图25中的第三导管固定件631和密封圈390的结构示意图;
60.图27是图22的一种变化方式示意图;
61.图28是图1实施例的第四控制机构800和第五控制机构850的内部结构示意图;
62.图29是图28中的第五滑动螺纹件880的结构示意图;
63.附图标号说明:
64.10.人工瓣膜,11.瓣膜支架,12.连接部,13.定位支架,15.远端挂钩,16.近端挂钩,17.倒刺,20.主动脉,21.主动脉窦底,30.原生瓣膜,100.远端脱钩机构,110.引导头,111.引导部,112.套管连接部,113.第一导管连接部,114.连接管,115.侧面开口,120.套管,121.第一引导段,130.远端钩挂件,131.第一导管过孔,132.第一环形凹槽,133.第一轴向凹槽,200.近端脱钩机构,230.第一弯曲爪,231.第一爪臂,232.近端限位件,240.第二弯曲爪,241.第二爪臂,242.近端钩挂件,310.第一导管,320.第二导管,330.第三导管,340.第四导管,350.第五导管,360.控弯管套管,370.锥形外壳,380.端盖,390.密封圈,400.第一控制机构,410.第一壳体,411.第一腔体,412.第一凹槽,413.第一贯通槽,414.第一插销,415.第一销孔,416.第一安装槽,417.第二排空管连接孔,418.第二连接孔,420.第一旋钮,421.第二插销,422.第二销孔,430.第一滑动螺纹件,431.第一导管固定件,432.第一排空管连接孔,433.第一连接孔,434.第一导管固定孔,436.第一螺纹件,438.第一连接杆,440.第一排空管,500.第二控制机构,520.第二旋钮,530.第二滑动螺纹件,540.第二排空管,600.第三控制机构,610.第三壳体,611.第三腔体,612.第二凹槽,613.第二贯通槽,614.第三凹槽,615.第三贯通槽,616.第三销孔,617.第三插销,618.第四排空管连接孔,619.第二安装槽,620.第三旋钮,630.第三滑动螺纹件,631.第三导管固定件,632.第三连接孔,633.第三排空管连接孔,634.第三导管固定孔,635.第二导管过孔,636.第三螺纹件,637.排空孔,638.第三连接杆,639.密封螺母,640.第三排空管,650.第四导管固定件,660.第四排空管,670.解锁按钮,671.锁止插片,680.复位机构,700.握持部,701.第四插销,702.第四销孔,703.锁止插槽,711.第二腔体,800.第四控制机构,810.第四壳体,811.第四腔体,820.第四旋钮,830.第四滑动螺纹件,831.第五导管固定件,840.第五排空管,850.第五控制机构,860.第五壳体,861.第五腔体,870.第五旋钮,880.第五滑动螺纹件,881.拉索固定件,882.第五连接杆,883.第五螺纹件,884.拉索固定孔。
具体实施方式
65.为了更清楚地说明本技术的实施例或现有技术中的技术方案,下面将对照附图说明本技术的具体实施方式。下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图,并获得其他的实施方式。
66.为使图面简洁,各图中只示意性地表示出了与本技术相关的部分,它们并不代表其作为产品的实际结构。在有些图中具有相同结构或功能的部件,仅示意性地绘示了其中的一个,或仅标出了其中的一个。在本文中,“一个”不仅表示“仅此一个”,也可以表示“多于一个”的情形。在本技术说明书和所附权利要求书中使用的术语“和/或”是指相关联列出的项中的一个或多个的任何组合以及所有可能组合,并且包括这些组合。术语“第一”、“第二”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
67.除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本技术中的具体含义。
68.如图1和图7所示,为了将人工瓣膜10输送至患者体内的目标位置后进行释放定
位,用人工瓣膜10置换已经发生病变的原生瓣环和瓣膜的功能,需要使用人工瓣膜输送装置,通过股动脉入路将人工瓣膜10输送到患者的主动脉窦底21位置,然后进行释放定位。本技术在现有技术的基础上,改进了人工瓣膜输送装置的人工瓣膜脱钩机构,以实现人工瓣膜10的精确定位和人工瓣膜输送装置可靠方便的操作。
69.实施例一。如图1和图7所示,本实施例为一种人工瓣膜脱钩机构,用于在人工瓣膜输送装置中装载和保持人工瓣膜10,并在患者体内使人工瓣膜10脱钩,从而将人工瓣膜10释放和定位至原生瓣膜30所在位置。如图3所示,人工瓣膜10为自膨胀式并具有至少1个远端挂钩15和至少1个近端挂钩16,本实施例的人工瓣膜10具有各3个远端挂钩15和近端挂钩16,但也可采用其他型号的人工瓣膜10。
70.在采用自膨胀式的人工瓣膜10时,通常需要将其压缩至人工瓣膜输送装置中,并与人工瓣膜输送装置中的人工瓣膜脱钩机构进行连接,然后在到达目标位置后利用其弹性自行膨胀,而不需要用球囊在患者体内将其扩张定位。人工瓣膜10的支架通常采用记忆金属等材料制成,从而在膨胀后具有很好的形状保持功能。本说明书中的人工瓣膜10均仅示出了其支架结构,未示出缝合至其支架结构上的密封膜、瓣叶等结构。这些未示出的结构均为现有技术,而仅示出支架结构可以更好地说明本技术的工作原理和发明点。
71.如图1和图8所示,本实施例包括位于远端的远端脱钩机构100,用于保持人工瓣膜10的远端挂钩15并使之适时脱钩;如图1和图12所示,本实施例还包括位于近端的近端脱钩机构200,适于连接至人工瓣膜输送装置的近端释放控制机构,用于保持人工瓣膜10的近端挂钩16并使之适时脱钩。如图1和图2所示,由于人工瓣膜输送装置包括多个导管,整体呈细长结构,本说明书中的近端和远端均指相对于人工瓣膜输送装置主体的位置,近端均指在人工瓣膜输送装置的轴线方向上靠近端盖380的一端,远端则反之;当导管如图中所示具有弯曲部分时,相关结构的相对位置沿弯曲的轴线的延伸方向进行区分。
72.其中如图8所示,远端脱钩机构100包括引导头110、套管120(图8中未示出,可参见图1、图2和图16)、远端钩挂件130;引导头110固定连接至人工瓣膜输送装置的第一导管310的远端,套管120固定连接至引导头110,远端钩挂件130固定连接至人工瓣膜输送装置的第二导管320的远端,用于挂设远端挂钩15。如图15所示,套管120具有中空腔体,适于套设至远端钩挂件130之外,并容纳如图3所示的压缩状态的人工瓣膜10的至少一部分,且在远端钩挂件130和近端脱钩机构200的配合下将人工瓣膜10或其部分结构装载和保持在套管120之内。
73.在远端脱钩机构100的保持状态,套管120套设于远端钩挂件130外部,将挂设在远端钩挂件130上的远端挂钩15约束于挂设状态,并将人工瓣膜10远端部分保持在径向收缩状态。在需要释放人工瓣膜10远端部分时,通过手术操作人员控制人工瓣膜输送装置,控制第一导管310和第二导管320中的1个或2个使套管120相对于远端钩挂件130向远端移动,当远端钩挂件130从套管120内部移动至外部时,套管120对远端挂钩15的约束消失,从而使远端挂钩15脱钩。第二导管320滑动套设于第一导管310的外部,且两者均为人工瓣膜输送装置的常用结构,现有技术提供了多种控制机构或控制方法,可参见后续实施例中的在现有技术上改进后的技术方案的详细说明,本实施例不做具体说明。
74.人工瓣膜10需要在体外装载至本实施例的人工瓣膜脱钩机构并使之在输送过程中一直处于保持状态;到达患者的主动脉窦底21后,操作者控制相对滑动设置的第一导管
310和第二导管320相对移动,实现远端脱钩。在远端脱钩操作之后,操作者另外通过控制近端脱钩机构200使人工瓣膜10的近端挂钩16脱钩,实现人工瓣膜10的脱钩释放操作。近端脱钩机构200也可有多种设置,在本实施例中不做限定。
75.和现有技术中申请人已经公开的技术方案相比,本技术的人工瓣膜脱钩机构的远端脱钩机构100仅需要连接至人工瓣膜输送装置的第一导管310和第二导管320,比现有技术减少了一根导管,从而实现了更加简单的结构,也使基于该脱钩机构的输送装置结构简单、操作方便可靠,尤其适用于近端需要准确定位至主动脉窦底21,而远端的定位要求相对较低的人工瓣膜10,例如图3至图6所示型号的人工瓣膜10。
76.实施例二。在实施例一的基础上,本实施例提供远端钩挂件130的一种优选结构。如图10和图11所示,本实施例的远端钩挂件130一体制成,具有第一导管过孔131、第一环形凹槽132和3个第一轴向凹槽133。第一导管过孔131用于滑动穿设第一导管310,使通过引导头110固定至第一导管310远端的套管120可以相对于远端钩挂件130移动。第一环形凹槽132周向设置于远端钩挂件130的外表面,第一轴向凹槽133沿轴向设置于第一环形凹槽132的近端,并与第一环形凹槽132构成t字形凹槽结构,从而适于挂设远端挂钩15,对挂设状态的所述远端挂钩15实现轴向限位。轴向指的是前文提到的输送装置的轴线方向,也就是第一导管310和第二导管320的轴向方向。远端钩挂件130的近端可设置如图10和图11中所示的轴肩结构,用于通过焊接或螺纹连接等方式连接第二导管320的远端。
77.第一轴向凹槽133的数量为至少1个,且不少于远端挂钩15的数量,从而适于人工瓣膜10远端的挂设。本实施例的挂设结构易于加工,成本低,可适用于多种远端挂钩15,只需要远端挂钩15具有适于设置于第一环形凹槽132内的尺寸较大的钩头和适于设置于第一轴向凹槽133内的钩颈即可。挂设完成后对远端挂钩15的轴向限位可靠,不易意外脱出。但作为变化方式,也可在远端钩挂件130的外表面设置凸起结构,用于挂设具有环形或t形挂钩的远端挂钩15。
78.实施例三。在以上实施例的基础上,本实施例提供一种引导头110的优选结构。如图9所示,引导头110包括固定连接的引导部111、套管连接部112和第一导管连接部113。引导部111的径向尺寸从近端向远端单调缩小,构成球头状、锥体状等引导结构;套管连接部112位于引导部111的近端,具有轴肩结构,套管120的远端套设并抵接至该轴肩结构后实现固定连接;第一导管连接部113位于近端,包括连接管114,适于第一导管310穿设固定;连接管114的侧壁开设有侧面开口115,可方便第一导管310和第一导管连接部113通过焊接固定。第一导管连接部113和套管连接部112也通过轴肩结构和管状结构的配合实现连接。
79.本实施例的结构便于加工,可将引导部111、套管连接部112和第一导管连接部113分别加工制成后进行焊接或粘接连接。由于引导头110、套管120和远端钩挂件130均为尺寸很小的精细结构,而且连接或配合关系较复杂,不容易兼顾成本和精度。本实施例通过将复杂的连接和配合关系进行了分解,通过多个简单结构的相互配合,实现了兼具低成本和高精度的精巧结构。
80.实施例四。在以上各实施例的基础上,本实施例提供一种套管120的优选结构。如图15所示,套管120的近端包括第一引导段121,第一引导段121的孔径自近端向远端单调缩小,构成释放或收入人工瓣膜10的引导结构。具体地,在患者体外装载人工瓣膜10时,第一引导段121用于套管120相对于远端钩挂件130向近端移动时使人工瓣膜10平稳收缩至套管
120内部;在患者体内释放人工瓣膜10时,第一引导段121用于套管120相对于远端钩挂件130向远端移动时使人工瓣膜10远端部分平稳膨胀和远端挂钩15平稳脱钩。图15中的第一引导段121为内倒角,也可通过弧形轮廓实现。
81.实施例五。在以上各实施例的基础上,本实施例提供一种将本技术的人工瓣膜脱钩机构应用于一种可精确定位的人工瓣膜10时的操作方法。如图3至图5所示,人工瓣膜10包括依次连接的瓣膜支架11、连接部12和定位支架13,瓣膜支架11包括多个远端挂钩15,定位支架13包括多个近端挂钩16;其中连接部12可变形,使瓣膜支架11相对于定位支架13可轴向移动。
82.如图6所示,人工瓣膜输送装置将人工瓣膜10输送到患者体内的目标位置后,近端脱钩机构200释放定位支架13,使定位支架13定位于目标位置;人工瓣膜输送装置通过控制第一导管310和第二导管320,使瓣膜支架11沿轴向移动至设定位置后,远端脱钩机构100释放瓣膜支架11,完成人工瓣膜10的定位和释放。
83.人工瓣膜10最典型的应用为用于替代病变的原生瓣膜30的功能。如图6所示,近端脱钩机构200释放定位支架13后,定位支架13膨胀定位至主动脉20的主动脉窦底21,此时装载有瓣膜支架11的套管120则穿过原生瓣膜30,并仍将瓣膜支架11保持在收缩状态,此时的人工瓣膜10处于图5所示的中间状态。
84.如图7所示,通过人工瓣膜输送装置控制第一导管310和第二导管320,使瓣膜支架11向近端移动至已经膨胀的定位支架13内部,此时在第二导管320的回缩动作以及在心脏泵出的血液流的作用下,原生瓣膜30可确保位于定位支架13和瓣膜支架11之间。
85.进一步地,通过控制第一导管310向远端移动,同时保持第二导管320不动,使连接至第二导管320的远端钩挂件130将瓣膜支架11轴向限制在图7所示位置,从而使套管120相对于远端钩挂件130向远端移动,实现瓣膜支架11的逐步释放和最终的远端挂钩15的脱钩。远端挂钩15在瓣膜支架11的膨胀力作用下从远端钩挂件130的限位结构中自动脱开,瓣膜支架11相位膨胀后将原生瓣膜30压紧至定位支架13,而瓣膜支架11的外侧缝制固定的密封膜也可贴合至原生瓣膜30或定位支架13,实现周向的密封,避免血液从四周泄漏。
86.本实施例的人工瓣膜10可一体通过记忆金属制成,并且使最后使用状态的形状为稳定状态,即膨胀状态的瓣膜支架11、定位支架13以及使用状态下的连接部12均为稳定状态,从而可以使定位释放后的人工瓣膜10可长期保持稳定的形状。而且将连接部12的稳定状态设置为使用状态时,可以降低前述瓣膜支架11移动定位过程的精度要求,使瓣膜支架11在释放后可自动恢复到最佳位置。同时,如果连接部12不具备上述自动恢复定位的功能,在套管120并未移动至最远端,即并未将远端挂钩15释放之前,也可通过控制第一导管310将套管120向近端收回,从而将定位不佳的瓣膜支架11收回套管120内,然后通过移动第二导管320将瓣膜支架11重新定位。
87.实施例六。在以上实施例的基础上,本实施例提供一种近端脱钩机构200的优选结构。如图12所示,本实施例的近端脱钩机构200包括依次套设于第二导管320外的第三导管330、第四导管340和第五导管350(图中未示出,参见图1和图2),以及第一弯曲爪230和第二弯曲爪240。第一弯曲爪230的近端固定连接至第三导管330的远端,第二弯曲爪240的近端固定连接至第四导管340的远端,使人工瓣膜输送装置可以通过控制第三导管330或第四导管340来使第一弯曲爪230和第二弯曲爪240相对移动。
88.如图13所示,第一弯曲爪230包括至少2个具有弹性的第一爪臂231,如图14所示,第二弯曲爪240包括至少2个具有弹性的第二爪臂241,如图12所示,第一爪臂231和第二爪臂241配对设置且其中一个的远端适于挂设近端挂钩16、另一个的远端适于将近端挂钩16约束于挂设状态并在第三导管330和第四导管340相对滑动时解除约束。本实施例的第一爪臂231和第二爪臂241的数量和近端挂钩16的数量相同设置,均为3个,但也可以是更多个。
89.在自然状态,第一爪臂231和第二爪臂241均具有自近端向远端单调外扩的扩展段,使第一弯曲爪230和第二弯曲爪240均呈向远端张开的爪子形状。第五导管350的远端具有第二引导段,第二引导段的孔径自远端向近端单调缩小。和套管120的第一引导段121的作用类似,第二引导段用于第五导管350相对于第三导管330和第四导管340向远端移动时使第一弯曲爪230和第二弯曲爪240平稳收缩至第五导管350内,以及用于第五导管350相对于第三导管330和第四导管340向近端移动时使第一弯曲爪230和第二弯曲爪240平稳扩张。
90.如图13所示,第一爪臂231的远端连接有近端限位件232;如图14所示,第二爪臂241的远端连接有近端钩挂件242;近端钩挂件242的远端具有t形凹槽结构,适于设置人工瓣膜10的近端挂钩16;近端限位件232呈套筒状,适于套设至近端钩挂件242的t形凹槽结构之外。如图12所示,在患者体外挂设近端挂钩16时,可控制导管使近端钩挂件242位于近端限位件232之外,将近端挂钩16放置于近端钩挂件242的t形凹槽结构内之后,控制第三导管330向远端移动,使近端限位件232套设至t形凹槽结构之外,从而将近端挂钩16限制于第二爪臂241的远端,完成挂设操作。
91.在上述收缩或扩张过程中,第三导管330和第四导管340的相对位置不变,从而使近端挂钩16保持在挂设状态。在第五导管350向近端移动的过程中,首先完成定位支架13的释放,然后完成第一弯曲爪230和第二弯曲爪240的释放。通过设置第一弯曲爪230和第二弯曲爪240的结构和弹性,可使两个弯曲爪释放后的定位支架13膨胀至使用状态,从而可通过实时影像确认定位支架13的位置是否最佳;如果需要调整,还可将第五导管350向远端移动,收回第一弯曲爪230和第二弯曲爪240,由于此时的近端挂钩16尚未脱钩,因此定位支架13也被收缩至图3的状态,从而可以通过移动第三导管330和第四导管340重新将定位支架13定位至最佳位置。
92.近端钩挂件242和第二爪臂241可一体制成,近端限位件232和第一爪臂231也可一体制成。作为简化技术方案,本实施例的第一弯曲爪230和第二弯曲爪240也可不设置,也可实现人工瓣膜10近端的释放,但是释放过程相对不易做到平稳,操作舒适性也不佳。
93.实施例七。本实施例是和实施例六并列的替代技术方案,可省去实施例六中第四导管340的设置。本实施例的近端脱钩机构200包括依次套设于第二导管320外的第三导管330和第五导管350,第三导管330的远端具有周向设置于外表面的第二环形凹槽和至少1个第二轴向凹槽,第二轴向凹槽轴向设置于第二环形凹槽的远端,并与第二环形凹槽构成t字形凹槽结构,从而适于挂设近端挂钩16,对挂设状态的近端挂钩16实现轴向限位;第五导管350的远端具有第二引导段,第二引导段的孔径自远端向近端单调缩小;第二引导段用于第五导管350相对于第三导管330向近端移动时使定位支架13平稳膨胀和近端挂钩16平稳脱钩,以及用于第五导管350相对于第三导管330向远端移动时使定位支架13平稳收缩。
94.本实施例结构更加简单,其中的近端挂钩16的挂设结构可参考远端钩挂件130上的结构进行设置,因此不再图示。同时本实施例的近端脱钩机构200和实施例五中所述的远
端脱钩机构100类似,在近端挂钩16脱钩之前,可以将部分展开的定位支架13进行回收,而实施例六中的近端脱钩机构200可以在定位支架13完全展开后进行回收,实际应用时可根据实施例六和实施例七各自的侧重点和实际应用场景进行选用。
95.实施例八。本实施例是和实施例六及实施例七并列的替代技术方案,可省去实施例六中的第三导管330和第四导管340的设置。本实施例的近端脱钩机构200包括套设于所述第二导管320外的第五导管350;第二导管320具有周向设置于外表面的第三环形凹槽,和至少1个第三轴向凹槽,第三轴向凹槽轴向设置于第三环形凹槽的远端,并与第三环形凹槽构成t字形凹槽结构,从而适于挂设近端挂钩16,对挂设状态的近端挂钩16实现轴向限位。第五导管350的远端具有第二引导段,第二引导段的孔径自远端向近端单调缩小;第二引导段用于第五导管350相对于第二导管320向近端移动时使定位支架13平稳膨胀和近端挂钩16平稳脱钩,以及用于第五导管350相对于第二导管320向远端移动时使定位支架13平稳收缩。
96.具体实施时,如图16所示,第二导管320的远端已经固定连接有一个远端钩挂件130,可将另一个远端钩挂件130固定至第二导管320上,并使其轴向凹槽朝向远端,从而可以实现上述结构,不用增加新的零件或结构。其中两个远端钩挂件130(其中一个用于设置近端挂钩16)的距离根据人工瓣膜10的图3的压缩状态的长度设置,在通过向近端移动第五导管350释放定位支架13之后,可以通过向近端移动第二导管320使仍然处于收缩状态的瓣膜支架11到达定位支架13内的目标位置,然后控制第一导管310释放瓣膜支架11。本实施例的结构比实施例七更加简单,同时和实施例七类似,本实施例也只能在定位支架13完全释放之前将其回收。
97.实施例九。本实施例为基于上述任一实施例的一种人工瓣膜输送装置。如图1和图2所示,本实施例包括第一控制机构400、第二控制机构500、握持部700和近端释放控制机构(例如可包括图中的第三控制机构600、第四控制机构800和第五控制机构850)。握持部700用于操作者在手术中单手握持,并用另一手进行控制操作。第一控制机构400连接第一导管310的近端,用于控制第一导管310相对于第二导管320轴向滑动;第二控制机构500连接第二导管320的近端,并同时连接至第一控制机构400,用于控制第一导管310和第二导管320同时轴向滑动;根据前述人工瓣膜脱钩机构实施例的说明,同时移动第一导管310和第二导管320时,可移动人工瓣膜10的远端,对人工瓣膜10的瓣膜支架11进行定位;控制第一导管310相对于第二导管320移动时,则可释放瓣膜支架11并使之脱钩,或者在瓣膜支架11脱钩前将其收回套管120内。
98.其中,第一控制机构400和第二控制机构500构成远端释放控制机构,用于控制远端脱钩机构100释放远端挂钩15,近端释放控制机构和远端释放控制机构连接至握持部700,和第一导管310等导管组件、端盖380、控弯管套管360、锥形外壳370等零件共同构成整个人工瓣膜输送装置。近端释放控制机构连接至近端脱钩机构200,用于控制近端脱钩机构200释放近端挂钩16。如图24所示,握持部700可通过两个带有第四插销701和第四销孔702的半壳体扣合构成带有第二腔体711的中空结构。第一控制机构400、第二控制机构500以及近端释放控制机构均有多种实现方式,包括现有技术提供的技术方案和本技术后续实施例提供的优化方案,因此在本实施例中不作详细说明。
99.实施例十。在实施例九的基础上,本实施例提供第一控制机构400和第二控制机构
500的一种优选实施方式。如图17所示,第一控制机构400包括第一壳体410、第一旋钮420、第一滑动螺纹件430;第二控制机构500包括第二旋钮520、第二滑动螺纹件530。其中,如图18所示,第一壳体410具有轴向延伸的第一腔体411和围绕于外部的环形的第一凹槽412;第一旋钮420和第一凹槽412的形状匹配、周向旋转设置于第一凹槽412内且轴向无法相对于第一壳体410移动;第一凹槽412的底部开设有轴向延伸的第一贯通槽413,第一滑动螺纹件430适于沿第一贯通槽413轴向滑动。
100.第一壳体410通过两个相同或结构接近的半壳体扣合构成,图18中仅示出了其中的一个。半壳体上设置有第一插销414和第一销孔415,通过第一插销414和第一销孔415的配合插接实现扣合。当然也可采用卡接、螺栓连接等方式将半壳体相互连接。如图21所示,第一旋钮420也可通过第二插销421和第二销孔422将两个零件扣合构成,从而简化生产模具的结构。如图19所示,第一滑动螺纹件430和第一旋钮420分别具有匹配的外螺纹和内螺纹,使第一旋钮420旋转时驱动第一滑动螺纹件430轴向滑动;第一导管310的近端在第一腔体411内与第一滑动螺纹件430固定。
101.如图17所示,近端释放控制机构包括第三壳体610,第三壳体610具有第三腔体611,第一壳体410的远端固定至第三壳体610的近端;第三壳体610具有和第一凹槽412结构类似的第二凹槽612(图中未示出,请参见图23),或者第三壳体610的近端与第一壳体410的远端共同构成第二凹槽612,第二旋钮520周向旋转设置于第二凹槽612内且轴向无法相对于第三壳体610移动;第二凹槽612的底部开设有轴向延伸的第二贯通槽613(图中未示出,也请参见图23),第二滑动螺纹件530适于沿第二贯通槽613轴向滑动;第二滑动螺纹件530和第二旋钮520分别具有匹配的外螺纹和内螺纹,使第二旋钮520旋转时驱动第二滑动螺纹件530轴向滑动;第二滑动螺纹件530通过连接杆和第二连接孔418固定连接至第一壳体410,第二导管320的近端固定连接至第二滑动螺纹件530;第三壳体610的远端连接至握持部700的近端。
102.如图19所示,第一滑动螺纹件430包括第一导管固定件431、第一螺纹件436和第一连接杆438;如图20所示,第一导管固定件431具有第一导管固定孔434、第一连接孔433和第一排空管连接孔432;第一导管固定孔434用于固定连接第一导管310的近端,第一连接杆438通过插设于第一连接孔433和第一螺纹件436上的连接孔(图中未示出)将图19中的各个零件固定连接成一体。其中的第一连接杆438的尺寸和第一贯通槽413尺寸和位置匹配,构成滑动配合,从而可以使第一滑动螺纹件430可以沿第一贯通槽413前后移动。第一螺纹件436共有2个,从而既便于生产和装配,同时构成稳定的螺纹传动件。第一排空管连接孔432用于连接第一排空管440。
103.如图18所示,第一壳体410上还设置有第二排空管连接孔417和第二连接孔418,分别用于密封插设连接第二排空管540(参见图17)和供第二滑动螺纹件530的连接杆穿过(参见图17)。第一壳体410的远端构成轴肩结构,用于插设连接至第三壳体610近端的第三腔体611内,构成滑动连接;第一壳体410的远端还设置有第一安装槽416,用于固定第二滑动螺纹件530,以限制其轴向的位置。在旋转第一旋钮420时,第一滑动螺纹件430相对于第一壳体410轴向移动,从而带动固定至第一滑动螺纹件430的第一导管310移动,此时只要不操作第二旋钮520,第二导管320就会保持不动,从而实现第一导管310和第二导管320的相对移动,用于控制远端脱钩机构100的脱钩操作。在旋转第二旋钮520时,第二滑动螺纹件530相
对于第三壳体610轴向移动,并带动固定至第二滑动螺纹件530的第二导管320、和第二滑动螺纹件530轴向固定连接的第一壳体410以及整个第一控制机构400前后移动,只要不同时操作第一旋钮420,即可实现第一导管310和第二导管320的同时移动,实现人工瓣膜10远端的瓣膜支架11相对于定位支架13的轴向移动。第一排空管440、第二排空管540、第三排空管640等排空管均用于排出各个依次套设的导管相对运动时导管之间的空气,以免空气压缩造成运动阻力,以及避免空气进入人体。
104.当本技术的人工瓣膜输送装置采用实施例八的人工瓣膜脱钩机构时,由于无需设置第三导管330及第三控制机构600,因此本实施例中的第三壳体610需要替换为握持部700,即直接将第一控制机构400连接至握持部700,其他结构作适应性修改即可。
105.实施例十一。在实施例十的基础上,本实施例提供第三控制机构600的一种优选实施方式,适用于近端释放控制机构包括第三控制机构600时的人工瓣膜输送装置。如图22所示,第三控制机构600包括第三壳体610、第三旋钮620和第三滑动螺纹件630。如图23所示,第三壳体610具有第三腔体611和第三凹槽614,第三旋钮620周向旋转设置于第三凹槽614内且轴向无法相对于第三壳体610移动,第三凹槽614的底部开设有轴向延伸的第三贯通槽615,第三滑动螺纹件630和第三旋钮620分别具有匹配的外螺纹和内螺纹,使第三旋钮620旋转时驱动第三滑动螺纹件630轴向滑动。
106.和第一壳体410类似,第三壳体610也通过两个半壳体扣合而成,通过第三插销617和第三销孔616配合构成连接。第二贯通槽613和第三贯通槽615均通过将半壳体切除一部分构成,在第三壳体610扣合后,第二贯通槽613和第三贯通槽615为连续的贯通槽,但作用不同,而且也可不设置成连续结构,因此作为两个独立的结构进行说明。第三壳体610上还设置有第四排空管连接孔618和第二安装槽619,分别用于密封插设第四排空管660和固定连接第四导管固定件650。
107.连接至近端脱钩机构200的第三导管330的近端固定连接至第三滑动螺纹件630;同样连接至连接近端脱钩机构200的第四导管340的近端通过第四导管固定件650固定连接至第三壳体610。在人工瓣膜10的输送和整体定位过程中,操作者通过握持部700整体移动所有的导管,从而移动装设并保持于人工瓣膜脱钩机构的人工瓣膜10;人工瓣膜10到达主动脉窦底21之后,参见图22,操作者通过控制第三旋钮620,使第三导管330移动,且此时滑动套设于第三导管330外部的第四导管340不移动,穿设于第三导管330内的第二导管320和第一导管310也不动,使仅有图12中所示第一弯曲爪230移动,可完成近端挂钩16的脱钩操作。第三导管330移动时,第三滑动螺纹件630以及第三排空管640一起移动,此时第三贯通槽615还用于第三排空管640的前后移动。
108.如图25所示,第三滑动螺纹件630包括第三导管固定件631、第三螺纹件636、第三连接杆638和密封螺母639。如图26所示,第三导管固定件631设置有第三导管固定孔634、第二导管过孔635、第三连接孔632、第三排空管连接孔633、排空孔637;其中第三导管固定孔634用于固定连接第三导管330的近端,第三连接孔632用于插设第三连接杆638,第三排空管连接孔633用于密封插设第三排空管640。第二导管过孔635的远端设置有密封圈390,在穿设第二导管320后,第二导管320的外壁压紧密封圈390,同时密封螺母639将密封圈390压合固定,使第二导管320在第二导管过孔635内滑动时构成密封结构。同时第二导管320和第三导管330之间的空气可通过排空孔637和第三排空管640排出,避免出现空气压缩造成阻
力,以及避免空气进入人体。
109.其他排空管以及相关的结构和本实施例类似,仅需适应性地修改部分结构即可实现类似的功能。在人工瓣膜输送装置采用实施例七的人工瓣膜脱钩机构时,由于无需设置第四导管340,因此也可省去上述的第四导管固定件650和第四排空管660。
110.实施例十二。在实施例十一的基础上,本实施例的人工瓣膜输送装置的近端释放控制机构还包括第四控制机构800和第五控制机构850。如图28所示,第四控制机构800包括第四壳体810、第四旋钮820和第四滑动螺纹件830,第四壳体810的近端固定连接至握持部700的远端。第四壳体810具有第四腔体811和第四凹槽(图中未标示),第四旋钮820周向旋转设置于第四凹槽内且轴向无法相对第四壳体810移动。第四凹槽的底部开设有轴向延伸的第四贯通槽(图中未示出,结构和其他贯通槽类似),第四滑动螺纹件830和所述第四旋钮820分别具有匹配的外螺纹和内螺纹,使第四旋钮820旋转时驱动第四滑动螺纹件830轴向滑动。
111.近端脱钩机构200的第五导管350的近端固定连接至第四滑动螺纹件830,在第四滑动螺纹件830滑动时,第五导管350同时前后移动,用于释放、脱钩或回收人工瓣膜10的近端,以及释放或回收图12所示的第一弯曲爪230和第二弯曲爪240。第四控制机构800还包括第五排空管840,用于排除第四导管340和第五导管350之间的空气。
112.仍如图28所示,第五控制机构850包括第五壳体860、第五旋钮870和第五滑动螺纹件880;第五壳体860具有第五腔体861和第五凹槽(图中未标示),第五旋钮870周向旋转设置于第五凹槽内且轴向无法相对于第五壳体860移动;第五凹槽的底部开设有轴向延伸的第五贯通槽(图中未示出),第五滑动螺纹件880和第五旋钮870分别具有匹配的外螺纹和内螺纹,使第五旋钮870旋转时驱动第五滑动螺纹件880轴向滑动。第五导管350为可控弯管,设置有控弯拉索(图中未示出),控弯拉索连接至第五滑动螺纹件880。如图29所示,第五滑动螺纹件880包括拉索固定件881、第五螺纹件883和第五连接杆882,第五连接杆882连接第五螺纹件883至拉索固定件881,控弯拉索固定至拉索固定件881上的拉索固定孔884。第五滑动螺纹件880还滑动套设于第五导管350外。
113.第五壳体860的近端也固定连接至第四滑动螺纹件830。仅操作第五旋钮870时,第五滑动螺纹件880带动控弯拉索前后移动,从而控制第五导管350的弯曲,使远端装载的人工瓣膜10和主动脉20同轴,以便人工瓣膜10的精确定位。仅操作第四旋钮820时,第四滑动螺纹件830带动第五导管350以及第五壳体860同时前后移动,控弯拉索也同时移动。
114.实施例十三。在以上各实施例的基础上,本实施例的人工瓣膜输送装置还包括人工瓣膜10的旋转机构。由于原生瓣膜30具有三个膜片,因此通常人工瓣膜10也会类似地设置三个人工膜片,而且如图5所示,定位支架13也会设置3个定位爪,因此在定位支架13释放前,需要确保定位支架13和原生瓣膜30在周向匹配设置,确保定位支架13与相应的主动脉窦对准,以便获得人工瓣膜10的最佳定位和固定效果。如果不设置人工瓣膜10的旋转机构,则需要在装载人工瓣膜10以及输送过程中确认好人工瓣膜10的周向位置,而在手术过程中无法调整,适应性不佳。
115.如图23所示,第三壳体610的远端设置有外螺纹,如图24所示,握持部700的近端匹配设置有内螺纹,如图22所示,第三壳体610的远端和握持部700的近端通过螺纹连接,使第三壳体610和第一壳体410可整体相对于握持部700沿轴向旋转。由于第四导管340通过第四
导管固定件650固定至第三壳体610,因此第四导管340和位于握持部700近端的整体结构一起转动,而第五导管350等远端结构固定至握持部700,因而并不会跟随旋转,可实现装载于远端的人工瓣膜10相对于第五导管350的旋转,使人工瓣膜10和原生瓣膜30实现周向位置匹配。在释放定位支架13后,如果发现定位支架13和原生瓣膜30的周向相对位置不佳,还可收回定位支架13后重新调整。
116.第三壳体610和握持部700之间的螺纹连接可选择细牙螺纹连接,并选用间隙较小的公差配合,使第三壳体610在旋转至合适位置后,可以通过螺纹连接的摩擦力保持位置,即通过螺纹连接实现一定程度的周向自锁定功能。作为本实施例的变化方式,如图27所示,也可在握持部700的近端设置周向均匀分布的多个锁止插槽703,并在第三滑动螺纹件630上设置解锁按钮670和复位机构680,解锁按钮670的锁止插片671在复位状态插设于某一锁止插槽703内,使第三壳体610和握持部700实现锁止;按下解锁按钮670时,锁止插片671从锁止插槽703中脱开,操作者即可整体旋转第三壳体610及近端的结构,并在旋转至合适位置后松开解锁按钮670重新实现锁止。
117.仍如图27所示,第三滑动螺纹件630以及其他类似的滑动螺纹件的部分结构还可一体设置,将图25中的第三导管固定件631、第三螺纹件636、第三连接杆638等结构一体设置,可使零件数量减少。而图25的多零件设置则可在多个控制机构件共享完全相同的零件,各有利弊,可根据应用场景灵活选用。
118.实施例十四。本实施例为一种人工瓣膜定位方法,用于通过人工瓣膜输送装置将自膨胀式的人工瓣膜10输送并释放至患者的主动脉窦底21。如图3至图5所示,适用本实施例的定位方法的人工瓣膜10包括依次连接的瓣膜支架11、连接部12和定位支架13,瓣膜支架11包括远端挂钩15,定位支架13包括近端挂钩16;连接部12可变形,使瓣膜支架11相对于定位支架13可轴向移动。人工瓣膜输送装置包括前述各实施例中的人工瓣膜脱钩机构的一种。
119.参见前述的各实施例,定位方法包括步骤:
120.s1.如图2和图3所示,将近端挂钩16挂设并保持至近端脱钩机构200,将远端挂钩15挂设并保持至远端脱钩机构100,使人工瓣膜10径向收缩保持于人工瓣膜脱钩机构;
121.s2.参见图7,在影像导航下通过动脉入路将人工瓣膜10输送至主动脉窦底21;通过第五控制机构850调整第五导管350的弯曲,使套管120和主动脉20同轴;
122.s3.通过人工瓣膜旋转机构控制人工瓣膜脱钩机构整体沿轴向旋转,使人工瓣膜10和患者的原生瓣膜30周向位置匹配;
123.s4.定位支架释放步骤,通过控制近端脱钩机构200将定位支架13释放,从而使之径向膨胀定位至主动脉窦底21;
124.s5.控制瓣膜支架11向近端移动,使之到达膨胀后的定位支架13内部,使原生瓣膜30位于瓣膜支架11和定位支架13之间;
125.s6.瓣膜支架释放步骤,通过控制套管120向远端移动,将瓣膜支架11释放并脱钩,从而使之径向膨胀定位至定位支架13内,并将原生瓣膜30压紧至定位支架13;
126.s7.通过控制近端脱钩机构200将定位支架13脱钩;
127.s8.将远端脱钩机构100从膨胀后的瓣膜支架11内向近端移动收回。
128.实施例十五。本实施例为应用实施例的人工瓣膜输送装置的定位方法。需要利用
实施例六提供的人工瓣膜脱钩机构。在定位支架释放步骤中,如果释放后的定位支架13的位置不合适,包括轴向位置和周向位置,则通过控制第五导管350向远端移动,将定位支架13径向压缩回收至第五导管350内,并将定位支架13调整位置后重新释放;在瓣膜支架释放步骤中,如果释放过程中的瓣膜支架11的位置不合适,则通过控制套管120向近端移动,将瓣膜支架11径向压缩回收至所述套管120内,并将瓣膜支架11调整位置后重新释放。
129.由于释放和脱钩为两个过程,尤其是设置有第一弯曲爪230和第二弯曲爪240时,定位支架13的释放和脱钩为两个独立的步骤,因此在脱钩前仍可将定位支架13收回重新调整位置。
130.实施例十六。在以上实施例的基础上,如图5所示,本实施例在定位支架13上设置了倒刺17,瓣膜支架11将原生瓣膜30压紧至定位支架13后,倒刺17刺入原生瓣膜30,使人工瓣膜10可实现更可靠的定位和固定。
131.上述仅为本技术的较佳实施例及所运用的技术原理,在不脱离本技术构思的情况下,还可以进行各种明显的变化、重新调整和替代。本领域技术人员可由本说明书所揭露的内容轻易地了解本技术的其他优点和功效。本技术还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本技术的精神的情况下进行各种修饰或改变。在不冲突的情况下,以上实施例及实施例中的特征可以相互组合。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。