1.本发明涉及数据存储设备领域,尤其涉及一种基于互联网的路口分流车路协同控制系统。
背景技术:
2.随着定位导航、空间遥感、移动通信等技术的发展,车联网技术获得极大发展。通过车联网与信号控制系统的协同可以实现更高效率的路网交通效果
‑‑
车路协同系统。该技术目前还处于研发实验、应用探索阶段。信号控制技术及其管理水平还处于先进与常规技术应用混杂状态。
3.现有的车路信号协同的技术系统,需要在车辆上加装专用设备,使得通过专用设备和上位机进行连接以对车辆进行定位和控制,但是采用这种方式成本较高,推广难度大。难以对现有的拥堵情况进行有效的改善。
技术实现要素:
4.本发明的目的在于提供一种基于互联网的路口分流车路协同控制系统,旨在通过路口对车辆通过时间进行预测,从而根据情况改变双向车道的车道数量,从而可以充分利用车道,提高通行效率,减少拥堵。
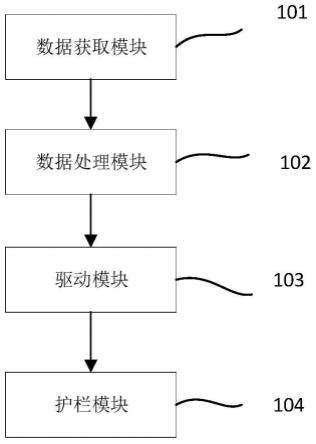
5.为实现上述目的,本发明提供了一种基于互联网的路口分流车路协同控制系统,包括数据获取模块、数据处理模块、驱动模块和护栏模块,所述获取模块、所述数据处理模块、所述驱动模块和所述护栏模块依次连接;
6.所述数据获取模块用于获取当前路口的车流信息,并将其传输至所述数据处理模块;
7.所述数据处理模块用于对所述车流信息据进行处理以判断车道拥堵情况,并将判断结果传输至驱动模块;
8.所述驱动模块基于所述判断结果发送驱动指令到所述护栏模块;
9.所述护栏模块,用于基于所述驱动指令移动到指定车道以改变通行通道面积。
10.其中,所述数据获取模块包括多个监控单元和预处理单元,多个所述监控单元分别对各个方向的车流进行拍照得到车流信息,所述预处理单元用于对所述车流信息进行预处理。
11.其中,所述数据处理模块包括识别单元、计数单元、计时单元和判断单元,所述识别单元、所述计数单元、所述计时单元和所述判断单元依次连接;
12.所述识别单元,用于对车流信息中的车辆进行识别;
13.所述计数单元,用于对识别出的车辆进行累加计数,得到车辆数量;
14.所述计时单元,用于基于车辆数量计算当前车道的通过时间;
15.所述判断单元,用于基于所述通过时间判断拥堵等级。
16.其中,所述驱动模块包括驱动单元和检测单元,所述驱动单元用于生成多个所述
护栏模块的驱动指令,所述检测单元用于对所述护栏模块的位置进行检测以确定是否移动到指定位置。
17.其中,所述护栏模块包括移动器、防护栏、连接器和储能件,所述防护栏设置在所述移动器上,所述连接器设置在所述防护栏的一侧,所述储能件设置在所述防护栏底部。
18.其中,所述移动器包括驱动电机、驱动齿轮组和轮组,所述驱动电机固定在所述防护栏上,所述驱动齿轮组和所述驱动电机的输出端连接,所述轮组和所述驱动齿轮组连接。
19.其中,所述护栏模块还包括限位件,所述限位件设置在所述防护栏的一侧。
20.本发明的一种基于互联网的路口分流车路协同控制系统,本技术用于十字路口,对车道数量的要求最低需要双向四车道,然后将数据获取模块安装到车道的相应位置,所述数据获取模块可以是监控摄像头,然后通过所述监控摄像头对车道两个方向的车辆信息进行获取,可以采取每间隔预设时间拍摄照片的方式以减少数据量,提高处理效率,拍摄的照片上传到上位机进行处理;然后通过所述数据处理模块可以对所述车流信息进行处理,具体可以是采用图像识别对车流信息中的车辆记录以判断双向车道的拥堵情况,从而将双向车道分为拥堵道和不堵道,然后基于所述驱动模块驱动所述护栏模块从不堵道移动一个车道,从而增加拥堵向的车道,减小不堵向的车道,从而提高通过效率。本技术采用实时收集车道信息,并上传到上位机进行分析处理,从而判别车道拥堵情况以随时对所述护栏模块进行调节的方式,可以提高护栏移动的相应速度,降低拥堵率。
附图说明
21.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
22.图1是本发明的第一实施例的一种基于互联网的路口分流车路协同控制系统的结构图。
23.图2是本发明的第二实施例的数据获取模块的结构图。
24.图3是本发明的第二实施例的数据处理模块的结构图。
25.图4是本发明的第二实施例的驱动模块的结构图。
26.图5是本发明的第三实施例的护栏模块的结构图。
27.图6是本发明的第四实施例的护栏模块的结构图。
28.图7是本发明的第四实施例的护栏模块的剖面示意图。
29.101-数据获取模块、102-数据处理模块、103-驱动模块、104-护栏模块、201-监控单元、202-预处理单元、203-识别单元、204-计数单元、205-计时单元、206-判断单元、207-驱动单元、208-检测单元、301-移动器、302-防护栏、303-连接器、304-储能件、305-驱动电机、306-驱动齿轮组、307-轮组、308-限位件、401-第一夹板、402-第二夹板、403-转动轴、404-卡槽、405-防护栏本体、406-太阳能板、407-扫刷、408-升降杆、409-转动杆、410-凸轮、411-复位弹簧、412-刷体。
具体实施方式
30.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
31.第一实施例
32.请参阅图1,图1是本发明的第一实施例的一种基于互联网的路口分流车路协同控制系统的结构图。本发明提供一种基于互联网的路口分流车路协同控制系统:包括数据获取模块101、数据处理模块102、驱动模块103和护栏模块104,所述获取模块、所述数据处理模块102、所述驱动模块103和所述护栏模块104依次连接;
33.所述数据获取模块101用于获取当前路口的车流信息,并将其传输至所述数据处理模块102;
34.所述数据处理模块102用于对所述车流信息据进行处理以判断车道拥堵情况,并将判断结果传输至驱动模块103;
35.所述驱动模块103基于所述判断结果发送驱动指令到所述护栏模块104;
36.所述护栏模块104,用于基于所述驱动指令移动到指定车道以改变通行通道面积。
37.在本实施方式中,本技术用于十字路口,对车道数量的要求最低需要双向四车道,然后将数据获取模块101安装到车道的相应位置,所述数据获取模块101可以是监控摄像头,然后通过所述监控摄像头对车道两个方向的车辆信息进行获取,可以采取每间隔预设时间拍摄照片的方式以减少数据量,提高处理效率,拍摄的照片上传到上位机进行处理;然后通过所述数据处理模块102可以对所述车流信息进行处理,具体可以是采用图像识别对车流信息中的车辆记录以判断双向车道的拥堵情况,从而将双向车道分为拥堵道和不堵道,然后基于所述驱动模块103驱动所述护栏模块104从不堵道移动一个车道,从而增加拥堵向的车道,减小不堵向的车道,从而提高通过效率。本技术采用实时收集车道信息,并上传到上位机进行分析处理,从而判别车道拥堵情况以随时对所述护栏模块104进行调节的方式,可以提高护栏移动的相应速度,降低拥堵率。
38.第二实施例
39.请查阅图2~图4,图2是本发明的第二实施例的数据获取模块的结构图。图3是本发明的第二实施例的数据处理模块的结构图。图4是本发明的第二实施例的驱动模块的结构图。所述数据获取模块101包括多个监控单元201和预处理单元202,所述数据处理模块102包括识别单元203、计数单元204、计时单元205和判断单元206,所述驱动模块103包括驱动单元207和检测单元208。
40.在本实施方式中,多个所述监控单元201分别对各个方向的车流进行拍照得到车流信息,所述预处理单元202用于对所述车流信息进行预处理。通过设置多个所述监控单元201可以更好地分别对各个车道进行监控,然后通过所述预处理单元202对照片中的噪点进行去除。
41.其中,所述识别单元203、所述计数单元204、所述计时单元205和所述判断单元206依次连接;所述识别单元203,用于对车流信息中的车辆进行识别;所述计数单元204,用于对识别出的车辆进行累加计数,得到车辆数量;所述计时单元205,用于基于车辆数量计算当前车道的通过时间;所述判断单元206,用于基于所述通过时间判断拥堵等级。所述识别
单元203采用图像识别技术对车流信息进行识别,从而可以对图像中的车辆进行识别,然后通过所述计数单元204对识别出的车辆进行计数,然后可以基于车辆的数量以及绿灯的持续时间计算当前车道的总通过时间,然后可以通过总通过时间判断拥堵等级,具体的方式是对两个方向车道的通过时间进行比较得到差值,当差值达到预设值时,就可以驱动所述护栏模块104移动而进行变道。
42.其次,所述驱动单元207用于生成多个所述护栏模块104的驱动指令,所述检测单元208用于对所述护栏模块104的位置进行检测以确定是否移动到指定位置。所述驱动单元207用于发出驱动指令,从而便于控制多个所述护栏模块104依次地、逐渐地进行变动,避免影响到车辆的正常行驶,然后通过所述检测单元208对所述护栏模块104的移动位置进行检测,具体也可以采用摄像头的方式,从而使得护栏能够移动到指定的位置。
43.第三实施例
44.请参阅图5,图5是本发明的第三实施例的护栏模块的结构图。所述护栏模块104包括移动器301、防护栏302、连接器303和储能件304,所述移动器301包括驱动电机305、驱动齿轮组307306和轮组307,所述护栏模块104还包括限位件308。
45.在本实施方式中,所述防护栏302设置在所述移动器301上,所述连接器303设置在所述防护栏302的一侧,所述储能件304设置在所述防护栏302底部。通过所述移动器301可以带动所述防护栏302移动,通过所述连接器303可以将多个所述护栏模块104连接到一起以组成阵列式护栏,然后所述储能件304用于存储电能,从而可以独立驱动所述移动器301进行移动。
46.其中,所述驱动电机305固定在所述防护栏302上,所述驱动齿轮组307306和所述驱动电机305的输出端连接,所述轮组307和所述驱动齿轮组307306连接。所述驱动电机305可以带动所述驱动齿轮组307306转动,从而可以方便地带动所述轮组307转动以进行位置的移动。
47.其次,所述限位件308设置在所述防护栏302的一侧。为了防止第一个所述护栏模块104跑偏导致后续的所述护栏模块104持续跑偏,因此可以在第一个防护栏302上设置限位件308,使得限位件308可以卡合在顶部的支架或者道路的凹槽中以对所述护栏模块104的移动位置进行限位。
48.第四实施例
49.请参阅图6~图7,图6是本发明的第四实施例的护栏模块的结构图。图7是本发明的第四实施例的护栏模块的剖面示意图。在第三实施例的基础上,本发明的所述连接器303包括第一夹板401、第二夹板402、转动轴403,所述防护栏302包括防护栏本体405、太阳能板406和扫刷407,所述扫刷407包括升降杆408、转动杆409、凸轮410、复位弹簧411和刷体412。
50.在本实施方式中,所述防护栏302具有两个卡槽404,两个所述卡槽404位于所述防护栏302的两侧,所述第一夹板401与所述卡槽404卡合,所述转动轴403与所述第一夹板401转动连接,并位于所述第一夹板401的一侧,所述第二夹板402与所述转动轴403转动连接,并位于所述第一夹板401的一侧。通过所述第一夹板401和所述第二夹板402可以分别和两个所述防护栏302上的卡槽404进行连接,从而可以将两个所述护栏模块104进行连接,并且可以围绕所述转动轴403转动以进行联合移动,为了避免在移动过程中发生运动干涉,可以将所述第一夹板401和所述第二夹板402与转轴接触处设置成柔性材料,使得移动更加方
便。
51.其中,所述太阳能板406设置在所述防护栏本体405顶部,所述扫刷407设置在所述太阳能板406的一侧,所述凸轮410和所述驱动齿轮组307306连接,所述升降杆408与所述防护栏本体405滑动连接,并接触所述凸轮410,所述转动杆409与所述升降杆408转动连接,并位于所述升降杆408的一侧,所述刷体412设置在所述转动杆409上,所述复位弹簧411设置在所述防护栏本体405和所述升降杆408之间。通过所述太阳能板406可以接收太阳能并持续对所述储能件304进行充能,在长期使用过后,所述太阳能板406表面可以粘上灰尘,然后可以通过所述扫刷407进行清扫,具体的方式是通过所述驱动齿轮组307306可以带动所述凸轮410转动,从而可以带动所述升降杆408上下移动,通过所述升降杆408向下移动可以带动所述转动杆409转动以使得所述刷体412接触太阳能板406表面以进行,然后在所述弹簧的作用下可以带动所述升降杆408抬起以复位,使得使用更加方便。
52.以上所揭露的仅为本发明一种较佳实施例而已,当然不能以此来限定本发明之权利范围,本领域普通技术人员可以理解实现上述实施例的全部或部分流程,并依本发明权利要求所作的等同变化,仍属于发明所涵盖的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。