1.本发明属于近场雷达散射成像测量、目标雷达散射特征诊断领域,具体涉及基于人工智能和机器视觉技术的一种局部雷达散射成像诊断设备辅助快速视觉定位的方法及系统。
背景技术:
2.当前,低雷达散射特征已经成为先进武器装备的标志性特点,已有大量武器装备,如隐身飞机、导弹、装甲坦克和战舰采用隐身技术,如精密的对缝拼接、吸波涂层/吸波蜂窝结构/电磁屏蔽薄膜等新材料运用。但隐身装备使用过程中,可能会因碰撞、划伤、自然老化、盐雾腐蚀等环境和人为因素,导致局部出现阶差等结构损坏或隐身材料性能退化等问题,局部雷达散射成像诊断设备是利用近场成像技术实现对被测目标进行微波成像,通过分析微波图像的散射亮点获取被测目标的散射分布特征,诊断隐身装备的雷达低可探测性能是否完好。然而,近场微波成像对于测量距离和测量方位角度(水平、俯仰)十分敏感,为了对比被测区域的雷达散射特性与原始状态的相对变化,雷达散射成像诊断设备在对被测目标微波成像时,必须尽可能精确地保证两次测量都要处于相同测量距离和测量方位角度,以提高测量结果的一致性,保证诊断结果的可靠性。
3.当前雷达散射成像诊断设备主要采用的激光定位技术能够实现高精度定位,通过精密的激光成像技术实现对测量距离和测量方位角度的确定,或者对被测目标采用比较复杂的标记方法,这些定位技术虽然可以提供精确的位置、方位信息,但是存在定位时间长,定位过程繁琐,设备复杂且昂贵等问题,对于需要在狭小空间、使用频次高、对测试有时间要求的雷达散射成像诊断场景就不再适用,需要一种兼顾精度、效率和成本的快速定位方法,因此,便携的局部雷达散射成像诊断设备的快速视觉定位是雷达散射成像诊断设备可靠使用的一项关键技术问题。
技术实现要素:
4.本发明针对上述现有技术中的不足,提供一种基于人工智能的局部雷达散射成像诊断设备辅助快速视觉定位方法,以实现局部雷达散射成像诊断设备快速而准确地定,包括以下步骤:
5.一种局部雷达散射成像诊断设备辅助快速视觉定位系统,其特征在于,该系统包括局部雷达散射成像诊断设备、摄像头模块、特征提取检测模块、定位判断模块以及显示器模块;其中
6.局部雷达散射成像诊断设备,其采用平面近场扫描架型雷达散射成像诊断设备,获得被测目标在某一角域内的雷达散射图像,进而根据散射图像判定被测目标的强散射区域分布;局部雷达散射成像诊断设备和被测目标保持相对固定的位置;
7.摄像头模块,其布置在局部雷达散射成像诊断设备上的一个固定位置,用于对被测目标拍照,采集被测目标的视觉图像并输出给特征提取检测模块;
8.特征提取检测模块,其采用yolov5s检测模型,采用特征提取网络cspdarknet53提取从摄像头模块接收到的图像的特征,其接收摄像头模块输出的被测目标位置的视觉图像信息,实时提取摄像头模块所采集图像中的视觉定位参考部位的第二轮廓线以及第二关键点信息,指导移动调节局部雷达散射成像诊断设备位置与姿态;
9.定位判断模块,其实时接收特征提取检测模块输出的第二轮廓线以及第二关键点信息,根据第一轮廓线和第一关键点信息判断设备是否已经到达基准位置,达到即完成定位匹配;
10.显示器模块,其接收来自定位判断模块的定位匹配信息,实时显示摄像头模块采集图像中被测目标的参考部位的第二轮廓线和第二关键点,以及被测目标处于基准位置时的参考部位的第一轮廓线和第一关键点,此外,显示器模块还显示被测目标位于基准位置时的视觉图像和定位匹配结果。
11.在本发明的一个实施例中,将摄像头模块固定在减震机柜前部、将显示器模块安装在减震机柜上部、在工控机内集成特征提取检测模块和定位判断模块;在局部雷达散射成像诊断设备的最佳诊断位置,拍摄被测目标的光学图像,并将其作为基准位置图像。
12.本发明还提供一种局部雷达散射成像诊断设备辅助快速视觉定位方法,该方法基于权利要求1或2所述的局部雷达散射成像诊断设备辅助快速视觉定位系统,具体包括下列步骤:
13.s1、在局部雷达散射成像诊断设备上某一固定位置,固定摄像头模块,用于获得光学图像;使用显示器模块实时显示摄像头拍摄到的画面;
14.s2、根据测量局部雷达散射图像对局部雷达散射成像诊断设备与被测目标的相对位置的要求,确定被测目标相对于局部雷达散射成像诊断设备的基准位置,人工移动局部雷达散射成像诊断设备至基准位置,使用搭载的摄像头对被测目标进行拍照,获得被测目标的基准位置图像;
15.s3、对被测目标的基准位置图像进行视觉观察分析,将具有明确轮廓的部位确定为视觉定位匹配的参考部位,并将轮廓边缘标记为第一轮廓线,将第一轮廓线标记为第一颜色;通过第一轮廓线的外接矩形框计算获得参考部位的中心点,也就是第一关键点;外接矩形框的四条边分别与图像的四条边平行,并且与第一轮廓线相切,第一关键点的坐标通过下式计算,将第一关键点标记为第一颜色;将第一轮廓线和第一关键点固定显示在显示器上;
[0016][0017]
其中,(x,y)为第一关键点的坐标,(x
min
,y
min
)为外接矩形框左上角坐标,(x
max
,y
max
)为外接矩形框右下角坐标;
[0018]
s4、通过前后左右移动、转动局部雷达散射成像诊断设备的方式,改变摄像头模块相对于被测目标的位置,采集被测目标不同角度和不同距离的视觉图像;采集过程中,需保证视觉定位的参考部位始终位于摄像头拍摄范围内;
[0019]
s5、针对摄像头模块采集到的被测目标的光学图像数据集,训练pspnet语义分割模型和yolov5s目标检测模型,在模型训练过程中采用adam优化算法优化模型,学习率调节方法采用的是模拟余弦退火调节学习率的方法;训练得到的pspnet语义分割最优模型能够
检测被测目标的参考部位的轮廓线,即第二轮廓线,将第二轮廓线标记为第二颜色,第二颜色不同于第一颜色;训练得到的yolov5s目标检测最优模型能够检测被测目标的参考部位的中心点,即第二关键点,将第二关键点标记为第二颜色;并将第二轮廓线和第二关键点显示在显示器上;
[0020]
s6、打开摄像头模块,同时移动局部雷达散射成像诊断设备至被测目标的基准测量位置附近,观察显示器模块,当显示器模块上出现视觉定位参考部位的完整的第二轮廓线时,观察显示器模块上的第一轮廓线,移动调整局部雷达散射成像诊断设备,在显示器模块中第二轮廓线与第一轮廓线基本重合后,通过第二轮廓线包围区域和第一轮廓线包围区域的交并比iou来判定当前位置与基准位置是否基本匹配,当iou大于数值a时,判定为当前位置与基准位置基本匹配;然后微调局部雷达散射成像诊断设备,通过计算第二关键点和第一关键点的欧式距离,判断当前位置与基准位置是否准确匹配,当三对关键点之间的欧式距离均小于规定值时,判定为位置精确匹配,屏幕自动提示定位匹配,完成精确定位。
[0021]
在本发明的一个实施例中,pspnet语义分割网络由骨干网络、加强特征提取结构以及头部网络组成,输入的图像首先经过骨干网络初步提取特征获得特征图,然后经过加强特征提取结构进一步聚合特征,丰富特征信息,提高特征图表示全局信息的能力,最后通过头部网络对特征进行整合上采样实现图像的语义分割。
[0022]
在本发明的一个具体实施例中,选用mobilenetv2作为pspnet的骨干网络,将普通的卷积用深度可分离卷积来替代;在反向残差中,首先利用尺寸为1
×
1的卷积对输入的图像特征数据进行升维,之后利用尺寸为3
×
3的深度可分离卷积进一步提取图像特征数据的相关特征,最后利用尺寸为1
×
1的卷积对提取到的特征进行降维操作。
[0023]
在本发明的另一个具体实施例中,yolov5s模型的骨干网络采用cspdarknet53网络,cspdarknet53由6个模块组成,分别是3个“卷积层-批归一化层-激活函数层”模块和3个残差模块组成cspdarknet53网络,“卷积层-批归一化层-激活函数层”模块由一个3
×
3的卷积层、一个批归一化层和一个leakyrelu激活函数层组成,其中前两个”卷积层-批归一化层-激活函数层”模块中的卷积层的步长为2,通过卷基层中的卷积核在图像上的滑动对图像进行下采样。
[0024]
在本发明的又一个具体实施例中,fpn由”卷积层-批归一化层-激活函数层”层,上采样层,1
×
1的卷积层和concatenation层组成;通过模型的骨干网络提取到的深层次特征在经过“卷积层-批归一化层-激活函数层”层进一步整合、完成上采样后,与骨干网络提取到的较浅层次的特征在concatenation层进行堆叠,整合与上采样过程通过卷基层的卷积运算完成,堆叠指的是特征在concatenation层内进行通道维度上的堆叠。
[0025]
在本发明的另一个实施例中,学习率调节方法使用模拟余弦退火调节学习率(cosine annealing),
[0026][0027]
其中,lr
t
为模拟余弦退火调节学习率,lr
max
为初始学习率,lr
min
为允许的最小学习率,既当学习率衰减至lr
min
时,将不再继续衰减,而是停留在lr
min
,lr
t
为当前学习率,t为当前训练轮次,t
max
为学习率衰减周期.
[0028]
在本发明的又一个实施例中,模型优化算法采用adam优化方法,如下式所示;
[0029][0030]
其中,l为损失函数,wi为网络的第i个权重参数,bi为网络的第i个偏置参数,t为迭代次数,α为学习率,β1,β2为指数加权参数,本发明取β1=0.9,β2=0.999,ε是为了防止分母为零的一个小量,本发明取ε=1
×
10-9
,w
i,t
为网络在第t次迭代时的第i个权重参数,b
i,t
为网络在第t次迭代时的第i个偏置参数,w
i,t 1
为网络在第t 1次迭代时的第i个权重参数,b
i,t 1
为网络在第t 1次迭代时的第i个偏置参数,为第i个权重参数在第t次迭代时的第二中间变量,为第i个权重参数在第t-1次迭代时的第二中间变量,为第i个偏置参数在第t次迭代时的第二中间变量,为第i个偏置参数在第t-1次迭代时的第二中间变量,为第i个权重参数在第t次迭代时的第一中间变量,为第i个权重参数在第t-1次迭代时的第一中间变量,为第i个偏置参数在第t次迭代时的第一中间变量,为第i个偏置参数在第t-1次迭代时的第一中间变量,为第i个权重参数的第三中间变量,为第i个偏置参数的第三中间变量,为第i个权重参数的第四中间变量,为第i个偏置参数的第四中间变量;上角标的t表示t次方。
[0031]
在本发明的再一个实施例中,步骤中s6具体如下:
[0032]
s601、不断移动调整局部雷达散射成像诊断设备,尽量使屏幕上实时显示的第二轮廓线与固定显示的第一轮廓线匹配,当iou大于95%时,判定为位置基本匹配;
[0033]
计算第二轮廓线包围区域和第一轮廓线包围区域的iou公式为:
[0034][0035]
其中,sg表示第二轮廓线包围区域的像素点,sr表示第一轮廓线包围的区域的像素点;
[0036]
s602、计算当前第二关键点与第一关键点之间的欧氏距离,当三对关键点之间的
欧式距离均小于设定的误差值时,停止调整局部雷达散射成像诊断,认为设备已经到达基准位置,完成局部雷达散射成像诊断设备相对于被测目标的定位匹配,屏幕模块显示“定位匹配”;
[0037]
设定对误差值的精度要求,计算当前定位点与基准定位点的欧氏距离的公式为:
[0038][0039]
式中,xi表示第二关键点的横坐标,yi表示第二关键点的纵坐标,xi′
表示第一关键点的横坐标,yi′
表示第一关键点的纵坐标,l表示摄像头模块采集的图像的宽度。
[0040]
与现有技术相比,本发明具有以下有益效果:
[0041]
一种基于人工智能的局部雷达散射成像诊断设备辅助快速视觉定位方法,采用固定在局部雷达散射成像诊断设备上的摄像头模组对飞机局部进行光学图像采集,提取基准图像的标记点特征,检测到基准视觉定位点;当飞机移动到新的观测点后,只需要把当前位置的视觉定位点与基准定位点进行比对,移动调整局部雷达散射成像诊断设备,就可以快速而准确地匹配设备,使局部雷达散射成像诊断设备恢复到基准位置。这种视觉定位方法操作简单,将整个定位时间缩短至10秒左右,并且定位精度对测量一致性影响在可接受范围内。
[0042]
综上,本发明通过深度学习网络提取基准位置经由摄像头拍摄的基准位置图像和当前位置图像的标记点特征,得到用于匹配标定的视觉定位点,通过对当前视觉定位点与基准定位点进行比对,不断调整移动局部雷达散射成像诊断设备,使当前测量位置恢复到基准位置,从而保证测量的一致性,实现基于人工智能的局部雷达散射成像诊断设备辅助快速视觉定位。
附图说明
[0043]
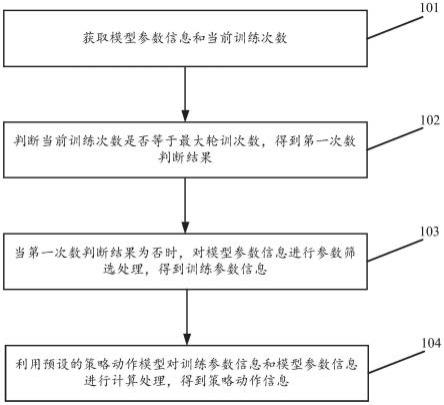
图1为局部雷达散射成像诊断设备辅助快速视觉定位方法结构图;
[0044]
图2为局部雷达散射成像诊断设备和辅助快速视觉定位系统结构示意;
[0045]
图3局部雷达散射成像诊断设备获得的局部散射图像;
[0046]
图4为显示定位匹配的视觉图像;
[0047]
图5为显示定位未匹配的视觉图像。
具体实施方式
[0048]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0049]
在附图中示出根据本发明公开实施例的各种结构示意图。这些图并非是按比例绘制的,其中为了清楚表达的目的,放大了某些细节,并且可能省略了某些细节。图中所示出的各种区域、层的形状及它们之间的相对大小、位置关系仅是示例性的,实际中可能由于制造公差或技术限制而有所偏差,并且本领域技术人员根据实际所需可以另外设计具有不同
形状、大小、相对位置的区域/层。
[0050]
本发明提供一种基于人工智能的局部雷达散射成像诊断设备辅助快速视觉定位系统(以下简称为“辅助快速视觉定位系统”),该系统能够用于实现后续本发明基于人工智能的局部雷达散射成像诊断设备辅助快速视觉定位方法,该系统包括局部雷达散射成像诊断设备、摄像头模块、特征提取检测模块、定位判断模块以及显示器模块。其中局部雷达散射成像诊断设备主要由小型雷达、平面近场扫描架、减震机柜和工控机组成,本发明将摄像头模块固定在减震机柜前部、将显示器模块安装在减震机柜上部、在工控机内集成特征提取检测模块和定位判断模块。辅助快速视觉定位系统用于提升局部雷达散射成像诊断设备的定位精度。
[0051]
其中,局部雷达散射成像诊断设备是目前常用的检测飞机、坦克等被测目标雷达散射特性的设备,为本领域技术人员熟知,本实施例中采用的是平面近场扫描架型雷达散射成像诊断设备。该设备通常采用近场散射成像测量技术,获得被测目标(飞机、坦克)在某一角域内的雷达散射图像,进而根据散射图像判定被测目标的强散射区域分布。为提高测量结果的一致性,局部雷达散射成像诊断设备通常需要和被测目标保持相对固定的位置。
[0052]
摄像头模块,在局部雷达散射成像诊断设备上选择一个固定位置进行安装,用于对被测目标(例如飞机、坦克)拍照,采集被测目标的视觉图像并输出给特征提取检测模块。尽量在局部雷达散射成像诊断设备的最佳诊断位置,拍摄被测目标的光学图像,并将其作为基准位置图像。将基准位置图像上具有明确轮廓的部位确定为视觉定位的参考部位。
[0053]
特征提取检测模块采用yolov5s检测模型,采用特征提取网络cspdarknet53提取从摄像头模块接收到的图像的特征,其接收摄像头模块输出的被测目标位置的视觉图像信息,实时提取摄像头模块所采集图像中的视觉定位参考部位的轮廓信息(第二轮廓线)以及关键点信息(第二关键点),便于指导移动调节局部雷达散射成像诊断设备位置与姿态。
[0054]
定位判断模块实时接收特征提取检测模块输出的轮廓信息(第二轮廓线)以及关键点信息(第二关键点)。首先进行粗定位匹配,计算第二轮廓线包围区域和第一轮廓线(第一轮廓线即是基准轮廓线,由人工标注得出)包围区域的iou(iou计算公式如后续所述),当iou大于95%时,判定为位置基本匹配;然后进行精准定位匹配,分别计算三对第二关键点与第一关键点的欧氏距离,如后续所述,当三对关键点的欧氏距离小于设定的误差值时,认为设备已经到达基准位置,完成定位匹配。
[0055]
显示器模块,其接收来自定位判断模块的定位匹配信息,实时显示摄像头模块采集图像中被测目标的参考部位的第二轮廓线和第二关键点,以及被测目标处于基准位置时的参考部位的轮廓线(第一轮廓线)和关键点(第一关键点),此外,显示器模块还显示被测目标位于基准位置时的视觉图像和定位匹配结果。
[0056]
本发明还提供一种基于人工智能的局部雷达散射成像诊断设备辅助快速视觉定位方法,该方法基于上述本发明基于人工智能的局部雷达散射成像诊断设备辅助快速视觉定位系统。通过深度学习网络提取经由摄像头拍摄的基准位置和当前位置的图像的特征,得到用于匹配标定的参考部位的轮廓线和关键点,通过比对第二轮廓线所包围区域和第一轮廓线所包围区域的1ou完成粗定位,通过计算第二关键点和第一关键点的欧式距离,不断调整移动局部雷达散射成像诊断设备,使该欧式距离不断减小,使当前测量位置恢复到基准位置,从而保证测量的一致性,实现基于人工智能的局部雷达散射成像诊断设备辅助快
速视觉定位。
[0057]
请参阅附图1所示,本发明一种基于人工智能的局部雷达散射成像诊断设备辅助快速视觉定位方法,包括以下步骤:
[0058]
s1、在局部雷达散射成像诊断设备上某一固定位置,固定摄像头模块,用于获得光学图像;使用显示器模块实时显示摄像头拍摄到的画面;摄像头可以安装在局部雷达散射成像诊断设备上的任意位置,基于快速视觉定位的局部雷达散射成像诊断设备的具体布局如图2所示;
[0059]
s2、根据测量局部雷达散射图像对局部雷达散射成像诊断设备与被测目标的相对位置的要求,确定被测目标相对于局部雷达散射成像诊断设备的基准位置(基准位置根据测量要求确定,主要是被测目标的强散射部位,是被测目标出厂时规定的位置),人工移动局部雷达散射成像诊断设备至基准位置,使用搭载的摄像头对被测目标进行拍照,获得被测目标的基准位置图像;
[0060]
s3、对被测目标的基准位置图像进行视觉观察分析,将具有明确轮廓的部位(如具有清晰边缘的口盖、迷彩涂装、防雷击条等)确定为视觉定位匹配的参考部位,并将轮廓边缘标记为第一轮廓线(标记为第一颜色),通过第一轮廓线的外接矩形框计算获得参考部位的中心点(第一关键点)。外接矩形框的四条边分别与图像的四条边平行,并且与第一轮廓线相切,第一关键点的坐标通过下式计算,将第一关键点标记为第一颜色。将第一轮廓线和第一关键点固定显示在显示器上;
[0061][0062]
其中,(x,y)为第一关键点的坐标,(x
min
,y
min
)为外接矩形框左上角坐标,(x
max
,y
max
)为外接矩形框右下角坐标;
[0063]
s4、通过前后左右移动、转动局部雷达散射成像诊断设备的方式,改变摄像头模块相对于被测目标的位置,采集被测目标不同角度和不同距离的视觉图像;采集过程中,需保证视觉定位的参考部位始终位于摄像头拍摄范围内(可以不处在摄像头视场中央位置);
[0064]
s5、针对摄像头模块采集到的被测目标的光学图像数据集(多幅被测目标图像),训练pspnet语义分割模型和yolov5s目标检测模型,在模型训练过程中采用adam优化算法(公式如后续所述)优化模型,学习率调节方法采用的是模拟余弦退火调节学习率的方法(公式如后续所述)。训练得到的pspnet语义分割最优模型可以检测被测目标的参考部位的轮廓线,即第二轮廓线,并标记为第二颜色,第二颜色不同于第一颜色;训练得到的yolov5s目标检测最优模型可以检测被测目标的参考部位的中心点,即第二关键点,并标记为第二颜色。并将第二轮廓线和第二关键点显示在显示器上。采用adam优化算法训练pspnet语义分割模型和yolov5s目标检测模型,采用模拟余弦退火调节学习率的方法进行学习率调节,均为本领域技术人员熟知,不再累述。
[0065]
进一步地,pspnet语义分割网络主要由骨干网络、加强特征提取结构以及头部网络组成,输入的图像首先经过骨干网络初步提取特征获得特征图,然后经过加强特征提取结构进一步聚合特征,丰富特征信息,提高特征图表示全局信息的能力,最后通过头部网络对特征进行整合上采样实现图像的语义分割。pspnet语义分割网络的具体实施过程为本领域技术人员熟知,不再累述(具体实施过程参见论文《pyramid scene parsing network》
zhao h,shi j,qi x,wang x,jia j.pyramid scene parsing network[c].computer vision and pattern recognition.ieee,2017:2881-2890)。
[0066]
进一步地,选用mobilenetv2作为pspnet的骨干网络(参见论文《mobilenetv2:inverted residuals and linear bottlenecks》sandler m,howard a,zhu m,zhmonginov a,chen l c.mobilenetv2:inverted residuals and linear bottlenecks[c].computer vision and pattern recognition.ieee,2018:4510-4520),mobilenetv2是一种轻量级的深层次网路,它的核心设计理念是将普通的卷积用深度可分离卷积来替代。在反向残差(inverted residuals)中,首先利用尺寸为1
×
1的卷积对输入的图像特征数据进行升维,之后利用尺寸为3
×
3的深度可分离卷积进一步提取图像特征数据的相关特征,最后利用尺寸为1
×
1的卷积对提取到的特征进行降维操作(rgb图像有r、g、b三个通道,升维就是通过卷积运算增加图像的通道数,降维就是通过卷积运算减小图像的通道数),卷积运算过程、mobilenetv2为本领域技术人员熟知,不再累述。
[0067]
进一步地,yolov5s模型的骨干网络采用cspdarknet53网络,cspdarknet53由6个模块组成,分别是3个“卷积层-批归一化层-激活函数层”模块和3个残差模块组成cspdarknet53网络(参见论文《yolov4:optimal speed and accuracy of object detection》bochkovskiy a,wang c y,liao h y m.yolov4:optimal speed and accuracy of object detection[j].arxiv preprint arxiv,2020,2004.10934)。“卷积层-批归一化层-激活函数层”模块由一个3
×
3的卷积层、一个批归一化层和一个leakyrelu激活函数层组成,其中前两个”卷积层-批归一化层-激活函数层”模块中的卷积层的步长为2,通过卷基层中的卷积核在图像上的滑动对图像进行下采样。cspdarknet53网络为本领域技术人员熟知,不再累述。
[0068]
进一步地,yolov5s是yolov5的轻量级网络,推理速度较快。yolov5s由骨干网络、特征金字塔(feature pyramid network,fpn)和头部网络组成(参见论文《feature pyramid networks for object detection》。lin t y,dollar p,girshick r,he k,hariharan b,belongie s.feature pyramid networks for onject detection[c].computer vision and pattern recognition.ieee,2017:2117-2125)。
[0069]
进一步地,fpn由”卷积层-批归一化层-激活函数层”层,上采样层,1
×
1的卷积层和concatenation层组成(参见论文《yolov4:optimal speed and accuracy of object detection》)。通过模型的骨干网络提取到的深层次特征在经过“卷积层-批归一化层-激活函数层”层进一步整合、完成上采样后,与骨干网络提取到的较浅层次的特征在concatenation层进行堆叠,整合与上采样过程通过卷基层的卷积运算完成,堆叠指的是特征在concatenation层内进行通道维度上的堆叠。这使得不同层次的特征得以融合,有利于提取出语义信息更丰富的特征。fpn为本领域技术人员熟知,不再累述。
[0070]
进一步地,头部网络部分由“卷积层-批归一化层-激活函数层”层和1
×
1的卷积层组成,包含13
×
13和26
×
26两个尺度,13
×
13的尺度对输入图像的感受野为32
×
32,26
×
26的尺度对输入图像的感受野为16
×
16,对检测不同尺寸的目标具有较好的效果。
[0071]
进一步地,激活函数使用mish函数:mish=x
·
tanh(ln(1 e
x
))。
[0072]
进一步地,学习率调节方法使用模拟余弦退火调节学习率(cosine annealing)。
[0073][0074]
其中,lr
t
为模拟余弦退火调节学习率,lr
max
为初始学习率,lr
min
为允许的最小学习率,既当学习率衰减至lr
min
时,将不再继续衰减,而是停留在lr
min
,lr
t
为当前学习率,t为当前训练轮次,t
max
为学习率衰减周期。
[0075]
进一步地,模型优化算法采用了adam优化方法,如下式所示。
[0076][0077]
其中,l为损失函数,wi为网络的第i个权重参数,bi为网络的第i个偏置参数,t为迭代次数,α为学习率,β1,β2为指数加权参数,本发明取β1=0.9,β2=0.999,ε是为了防止分母为零的一个小量,本发明取ε=1
×
10-9
,w
i,t
为网络在第t次迭代时的第i个权重参数,b
i,t
为网络在第t次迭代时的第i个偏置参数,w
i,t 1
为网络在第t 1次迭代时的第i个权重参数,b
i,t 1
为网络在第t 1次迭代时的第i个偏置参数,为第i个权重参数在第t次迭代时的第二中间变量,为第i个权重参数在第t-1次迭代时的第二中间变量,为第i个偏置参数在第t次迭代时的第二中间变量,为第i个偏置参数在第t-1次迭代时的第二中间变量,为第i个权重参数在第t次迭代时的第一中间变量,为第i个权重参数在第t-1次迭代时的第一中间变量,为第i个偏置参数在第t次迭代时的第一中间变量,为第i个偏置参数在第t-1次迭代时的第一中间变量,为第i个权重参数的第三中间变量,为第i个偏置参数的第三中间变量,为第i个权重参数的第四中间变量,为第i个偏置参数的第四中间变量。上角标的t表示t次方。
[0078]
s6、打开摄像头模块,同时移动局部雷达散射成像诊断设备至被测目标的基准测量位置附近,观察显示器模块,当显示器模块上出现视觉定位参考部位的完整的第二轮廓线时,观察显示器模块上的第一轮廓线,移动调整局部雷达散射成像诊断设备,在显示器模块中第二轮廓线与第一轮廓线基本重合后,通过第二轮廓线包围区域和第一轮廓线包围区
域的交并比(iou)来判定当前位置与基准位置是否基本匹配,当iou大于95%时,判定为当前位置与基准位置基本匹配;然后微调局部雷达散射成像诊断设备,通过计算第二关键点和第一关键点的欧式距离,判断当前位置与基准位置是否准确匹配,当三对关键点之间的欧式距离均小于规定值时,判定为位置精确匹配,屏幕自动提示定位匹配,完成精确定位。具体如下。
[0079]
s601、不断移动调整局部雷达散射成像诊断设备,尽量使屏幕上实时显示的第二轮廓线与固定显示的第一轮廓线匹配,当iou大于95%时,判定为位置基本匹配;
[0080]
计算第二轮廓线包围区域和第一轮廓线包围区域的iou公式为:
[0081][0082]
其中,sg表示第二轮廓线包围区域的像素点,sr表示第一轮廓线包围的区域的像素点。
[0083]
s602、计算当前第二关键点与第一关键点之间的欧氏距离,当三对关键点之间的欧式距离均小于设定的误差值时,停止调整局部雷达散射成像诊断,认为设备已经到达基准位置,完成局部雷达散射成像诊断设备相对于被测目标的定位匹配,屏幕模块显示“定位匹配”;
[0084]
设定的精度要求是误差值小于0.01,计算当前定位点与基准定位点的欧氏距离的公式为:
[0085][0086]
式中,xi表示第二关键点的横坐标,yi表示第二关键点的纵坐标,xi′
表示第一关键点的横坐标,yi′
表示第一关键点的纵坐标,l表示摄像头模块采集的图像的宽度。
[0087]
综上,本发明一种基于人工智能的局部雷达散射成像诊断设备辅助快速视觉定位方法及系统,能够实现兼顾局部雷达散射成像诊断设备视觉定位效率和精度,能够快速而准确地定位,并且操作简单,将整个定位时间缩短至10秒左右,定位精度对测量一致性影响在可接受范围内。
[0088]
以上内容仅为说明本发明的技术思想,不能以此限定本发明的保护范围,凡是按照本发明提出的技术思想,在技术方案基础上所做的任何改动,均落入本发明权利要求书的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。