技术特征:
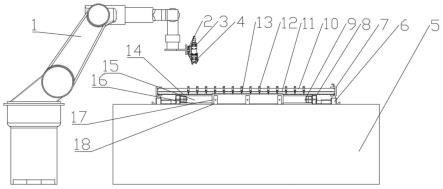
1.一种大尺寸金属夹层结构的自动激光焊接装置,其特征在于:包括底部工装(5)与机器人摇臂(1),所述底部工装(5)的顶面放置有下面板(16),所述底部工装(5)的顶面设置有第一限位机构,所述下面板(16)的相对两侧通过所述第一限位机构限位,所述底部工装(5)的顶面从下至上依次设置有第二限位机构、上面板(14)与第三限位机构,所述第二限位机构内夹持有若干芯子(15),通过所述第二限位机构限位将若干所述芯子(15)接触设置在所述下面板(16)的顶面,所述上面板(14)通过所述第三限位机构限位在若干所述芯子(15)上,所述第三限位机构连接在所述第二限位机构上方,所述机器人摇臂(1)位于所述底部工装(5)的一侧,所述机器人摇臂(1)的一端连接有焊接机构,所述焊接机构的焊接端穿过所述第三限位机构与所述上面板(14)的顶面对应设置,所述焊接机构的焊接端能够根据所述上面板(14)的平整度自行调节。2.根据权利要求1所述的大尺寸金属夹层结构的自动激光焊接装置,其特征在于:所述第一限位机构包括若干磁吸底座(30)、若干三轴液压缸(17)与两组侧限位块(18),若干所述磁吸底座(30)与若干所述三轴液压缸(17)分别固定连接在所述底部工装(5)的顶面,两组所述侧限位块(18)分别固定连接在若干所述磁吸底座(30)与若干所述三轴液压缸(17)的相对侧,两组所述侧限位块(18)抵接在所述下面板(16)的相对侧上。3.根据权利要求1所述的大尺寸金属夹层结构的自动激光焊接装置,其特征在于:所述第二限位机构包括两组芯子限位块支架(8)、对称设置在两组所述芯子限位块支架(8)背离侧的若干液压顶杆(6)、设置在两组所述芯子限位块支架(8)相对侧上的距离调节单元,所述距离调节单元夹持若干所述芯子(15),若干所述液压顶杆(6)的固定端分别固定连接在所述底部工装(5)的顶面,两组所述芯子限位块支架(8)的背离侧分别固定连接在若干所述液压顶杆(6)的伸缩端。4.根据权利要求3所述的大尺寸金属夹层结构的自动激光焊接装置,其特征在于:所述距离调节单元包括若干芯子限位块(9)两组第一条形通槽与若干紧固螺栓,两组所述第一条形通槽分别对应开设在两组所述芯子限位块支架(8)上,若干所述芯子限位块(9)分别沿所述第一条形通槽滑动连接在两组所述芯子限位块支架(8)的相对侧上,若干所述紧固螺栓的螺杆穿过所述第一条形通槽且还与若干所述芯子限位块(9)螺纹连接,所述芯子(15)夹持在相邻所述芯子限位块(9)之间。5.根据权利要求4所述的大尺寸金属夹层结构的自动激光焊接装置,其特征在于:相邻所述芯子限位块(9)之间形成凹槽,相邻所述凹槽关于所述芯子限位块(9)对称设置,两组所述芯子限位块支架(8)上的若干所述凹槽对应设置。6.根据权利要求3所述的大尺寸金属夹层结构的自动激光焊接装置,其特征在于:所述第三限位机构包括两组u形槽钢(7)与若干组多点约束架(10),两组u形槽钢(7)分别固定连接在若干所述液压顶杆(6)的上方,两组所述u形槽钢(7)位于上面板(14)的两侧,若干所述多点约束架(10)固定连接在两组所述u形槽钢(7)之间,其中一组所述u形槽钢(7)上连接有吹水装置(29),所述吹水装置(29)的出口与所述上面板(14)顶面对应设置,每一所述多点约束架(10)内的相对侧分别开设有多点约束固定槽(11),每一组所述多点约束固定槽(11)的底壁上等间距固定连接有若干多点约束液压缸(12),若干所述多点约束液压缸(12)的多点约束液压缸顶杆(13)穿过所述多点约束固定槽(11)与所述上面板(14)顶面对应设置,所述焊接机构的焊接端位于两组所述多点约束架(10)之间且与所述上面板(14)的顶面对应
设置。7.根据权利要求6所述的大尺寸金属夹层结构的自动激光焊接装置,其特征在于:所述多点约束架(10)底部开设有若干第二条形通槽,若干所述第二条形通槽与若干所述芯子(15)的侧边对应设置,所述焊接机构的焊接端穿过任一所述第二条形通槽与所述上面板(14)对应设置。8.根据权利要求7所述的大尺寸金属夹层结构的自动激光焊接装置,其特征在于:所述焊接机构包括支架总成,所述支架总成上固定连接在所述机器人摇臂(1)的焊接端,所述支架总成上固定连接有超声波探头组件(4)与两组激光焊接头(3),两组所述激光焊接头(3)位于所述超声波探头组件(4)的两侧,两组所述激光焊接头(3)的焊接端靠近所述超声波探头组件(4)倾斜设置。9.根据权利要求8所述的大尺寸金属夹层结构的自动激光焊接装置,其特征在于:所述支架总成包括多工位头架(2),所述多工位头架(2)固定连接在所述机器人摇臂(1)的焊接端,所述多工位头架(2)上转动连接有丝杠(20),所述多工位头架(2)上固定连接有多工位架固定板(19),所述超声波探头组件(4)固定连接在所述多工位架固定板(19)上,所述多工位头架(2)上滑动连接有两组滑块(21),两组所述滑块(21)位于所述多工位架固定板(19)的两侧,所述丝杠(20)穿过两组所述滑块(21),两组所述激光焊接头(3)分别通过转向盘(22)固定连接在两组所述滑块(21)上。10.根据权利要求9所述的大尺寸金属夹层结构的自动激光焊接装置,其特征在于:所述超声波探头组件(4)包括竖向设置的超声波探头移动气缸(23),所述超声波探头移动气缸(23)的一端通过所述超声波探头固定架(24)固定连接在所述多工位架固定板(19)上,所述超声波探头移动气缸(23)的底端竖向滑动连接有超声波探头(26),所述超声波探头(26)的顶端与所述超声波探头移动气缸(23)的底端之间固定接有弹簧(25),所述超声波探头(26)的底端滚动配合有橡胶滚子(28),所述超声波探头移动气缸(23)一侧连接有滴水管(27),所述滴水管(27)的出口与所述超声波探头(26)的底端对应设置。
技术总结
本发明属于激光焊接技术领域,尤其涉及一种大尺寸金属夹层结构的自动激光焊接装置,包括底部工装与机器人摇臂,底部工装的顶面放置有下面板,底部工装的顶面设置有第一限位机构,下面板的相对两侧通过第一限位机构限位,底部工装的顶面从下至上依次设置有第二限位机构、上面板与第三限位机构,第二限位机构内夹持有若干芯子,通过第二限位机构限位将若干芯子接触设置在下面板的顶面,上面板通过第三限位机构限位在若干芯子上,第三限位机构连接在第二限位机构上方,机器人摇臂位于底部工装的一侧,机器人摇臂的一端连接有焊接机构,焊接机构的焊接端穿过第三限位机构与上面板的顶面对应设置,焊接机构的焊接端能够根据上面板的平整度自行调节。板的平整度自行调节。板的平整度自行调节。
技术研发人员:陆晓峰 刘传昊 朱晓磊 李明轩 刘杨
受保护的技术使用者:南京工业大学
技术研发日:2022.09.06
技术公布日:2022/11/11
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。