技术特征:
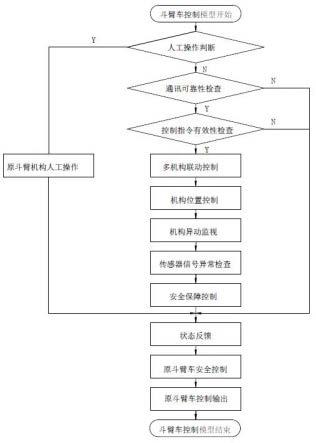
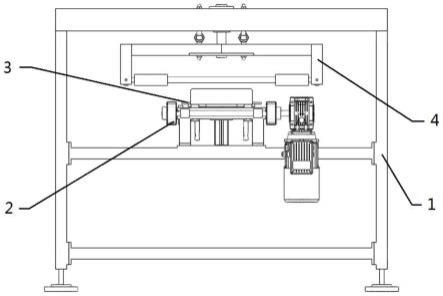
1.一种电力机器人专用绝缘斗臂车的控制方法,所述电力机器人专用绝缘绝缘斗臂车包括臂机构、平台机构、副大梁(13)和支腿(14),所述臂机构包括直伸臂(1)和回转台(11),所述平台机构包括平台摆臂(2)、平台摆动支架(3)和平台支架(4),所述回转台(11)和支腿(14)均安装在副大梁(13)上,所述直伸臂(1)安装在回转台(11)上,所述平台摆臂(2)安装在直伸臂(1)上,所述平台摆动支架(3)安装在平台摆臂(2)上,所述平台支架(4)安装在平台摆动支架(3)上,其特征在于:所述电力机器人专用绝缘绝缘斗臂车还包括电力机器人(5)、平台高度传感器(6)、平台摆动角度传感器(7)、平台摆臂摆动角度传感器(8)、臂长度传感器(9)、臂角度传感器(10)、臂回转角度传感器(12)、绝缘斗臂车控制器(15)和wifi-can设备(16),所述电力机器人(5)安装在平台支架(4)上,所述平台高度传感器(6)和平台摆动角度传感器(7)均安装在平台摆动支架(3)上,所述平台摆臂摆动角度传感器(8)安装在平台摆臂(2)上,所述臂长度传感器(9)和臂角度传感器(10)均安装在直伸臂(1)上,所述臂回转角度传感器(12)安装在回转台(11)上,所述绝缘斗臂车控制器(15)和wifi-can设备(16)均安装在副大梁(13)上,所述平台高度传感器(6)、平台摆动角度传感器(7)、平台摆臂摆动角度传感器(8)、臂长度传感器(9)、臂角度传感器(10)和臂回转角度传感器(12)均与绝缘斗臂车控制器(15)通过电性连接,所述wifi-can设备(16)与电力机器人(5)通过无线wifi连接,所述wifi-can设备(16)的can总线接口与绝缘斗臂车控制器(15)连接;所述电力机器人专用绝缘斗臂车的控制方法如下:a、 人工操作优先判断:在没有人工操作的情况下,绝缘斗臂车控制器(15)才能执行电力机器人(5)的控制指令,在电力机器人(5)控制绝缘斗臂车的过程中,如检测到人工操作介入,则立即终止电力机器人(5)的控制;b、 通讯可靠性检查:接口协议要求电力机器人(5)每100ms发送一次控制指令数据,绝缘斗臂车控制器(15)检查收到的控制指令中时间戳数据是否在持续增加,如果连续300ms未收到电力机器人(5)的新控制数据,则自动终止当前电力机器人(5)的控制指令,确保绝缘斗臂车控制的安全性;c、 控制指令有效性检查:该检查中包括运动方向有效性检查和目标位置有效性检查;运动方向有效性检查:检查电力机器人(5)的控制指令中运动方向与运动目标位置的一致性,即机构通过向该方向运动,可以到达目标位置,否则该控制指令无效;目标位置有效性检查:检查电力机器人(5)的控制指令中机构运动的目标位置是否可到达,各机构的动作范围都会有一个最小值和最大值,在目标位置超出这个范围时都会判断为该控制指令无效,另外、绝缘斗臂车的安全作业空间范围与具体车型以及作业时四只支腿(14)水平伸出的具体位置相关,当电力机器人(5)的控制指令中的机构目标位置超出了绝缘斗臂车允许的安全空间,则判断为该控制指令无效;在控制指令无效时,绝缘斗臂车控制器(15)反馈相应信息给电力机器人(5),此时电力机器人(5)需重新规划路径,发送新的控制指令;d、 多机构联动控制:直伸臂(1)的起伏、伸缩、回转可以同时动作,电力机器人(5)的安装平台部的平台摆臂
摆动、平台摆动、平台升降也可以同时动作,当同时控制直伸臂(1)和电力机器人(5)的安装平台部机构动作时,先执行直伸臂(1)的机构动作,在直伸臂(1)的机构到达指定位置后,再执行电力机器人(5)的安装平台部机构动作;e、 机构位置控制:绝缘斗臂车控制器(15)持续接收到电力机器人(5)发送的有效控制指令后,绝缘斗臂车控制器(15)自动执行机构动作,到达指定目标位置,绝缘斗臂车控制器(15)按照指令中约定的机构动作方向,控制机构动作,并自主控制机构的动作速度通过高速区、减速区、低速区、停止区四个阶段,机构可以到达目标指定位置;在到达目标位置前由远及近划分为四个速度区域,在高速动作区,机构动作速度保持高速运动;在减速动作区,通过a、b两点插值计算动作速度,机构动作速度由高速vh逐步降低至低速vl;在低速动作区,机构动作速度保持低速运动;进入动作停止区,机构动作速度立即降低为0,到达指定目标位置;在机构位置控制动作执行时,绝缘斗臂车控制器(15)反馈给电力机器人(5)该动作的执行状态;f、 机构异动监视:机构异动监视功能是在电力机器人(5)控制绝缘斗臂车的过程中,在绝缘斗臂车控制器(15)中未执行机构动作指令情况下,在一定的时间范围内,发现机构的位置数据超出了一定偏差,此时绝缘斗臂车控制器(15)判定出现了机构异常动作,并立即触发安全保障机制;g、 传感器信号异常检查:该检查中包括信号有效性检查和信号随动性检查:信号有效性检查:每个传感器在安装后,其信号会在一定的有效范围内,当传感器出现线路短路、断路、安装位置异常问题时,传感器信号会超出有效范围,此时绝缘斗臂车控制器(15)判定该传感器信号有效性异常;信号随动性检查:当绝缘斗臂车的各机构按照电力机器人(5)的控制指令进行机构动作时,如果检测到传感器信号不改变或者出现反方向的信号改变时,绝缘斗臂车控制器(15)判定该传感器信号随动性异常;当绝缘斗臂车控制器(15)判定传感器信号出现异常时,立即触发安全保障机制;h、 安全保障机制:安全保障机制主要包括:在电力机器人(5)的通讯出现异常时、在有人工操作介入时、在检查到控制指令无效时,立即停止执行电力机器人(5)的控制指令,而当机构动作异常时、传感器信号检查异常时,立即终止电力机器人(5)的控制指令,并切断液压动力源,确保所有动作停止;i、绝缘斗臂车状态反馈:反馈信息主要包括:绝缘斗臂车的各机构的当前位置数据、机构状态信息、时间戳信息,其中机构状态信息中包括人工操作状态标记、动作指令有效性标记、动作指令执行中标记、机构异动标记、传感器异常标记、机构动作安全限制标记,紧急停止状态标记,其中时间戳信息是绝缘斗臂车控制器(15)每100ms数值增大1,表征系统运行时间的数据,电力机器人(5)可根据该值判断绝缘斗臂车反馈数据的有效性。
2.根据权利要求1所述的电力机器人专用绝缘斗臂车的控制方法,其特征在于:所述绝缘斗臂车控制器(15)可以计算直伸臂(1)和电力机器人5的安装平台的位置数据,所述位置数据包括通过臂长度传感器(9)测得的直伸臂长度、通过臂角度传感器(10)测得的直伸臂角度、通过臂回转角度传感器(12)测得的直伸臂回转角度、通过平台摆臂摆动角度传感器(8)测得的平台摆臂角度、通过平台摆动角度传感器(7)测得的平台摆动角度、通过平台高度传感器(6)测得的平台升降高度。3.根据权利要求1所述的电力机器人专用绝缘斗臂车的控制方法,其特征在于:电力机器人(5)和绝缘斗臂车的通过wifi-can设备(16)进行数据交换:wifi-can设备(16)可以实现wifi与can网络的数据转换,wifi-can设备(16)自带tcp/ip协议栈,可以作为tcpclient连接电力机器人(5)的tcpsever,通过无线wifi技术与电力机器人(5)进行数据交换,wifi-can设备(16)的can总线接口与绝缘斗臂车控制器(15)连接,负责与绝缘斗臂车进行通讯。4.根据权利要求3所述的电力机器人专用绝缘斗臂车的控制方法,其特征在于: wifi-can设备(16)可以实现tcp帧与can信息相互转化,wifi-can设备(16)接收到绝缘斗臂车控制器(15)的can信息时,先将每条can信息转化为具有20个字节长度的固定格式的can帧,然后将多条can帧打包形成一条tcp帧,通过wifi技术发送给电力机器人(5),wifi-can设备(16)接收到电力机器人(5)发送的tcp帧时,先拆解为多条固定格式的can帧,然后将每个can帧解析为can信息,并通过can总线将信息发送给绝缘斗臂车控制器(15),每个can帧中包含帧头、帧信息、can-id、can-data、帧备用、帧校验;帧头:2个字节,为固定数值,表示一帧数据的开始;帧信息:2个字节,标识该can帧中的一些信息,如can-id为标准帧格式还是扩展帧格式、有效数据长度;can-id:4个字节,can标准帧格式占11位,can扩展帧格式占29位;can-data:8个字节,can信息中的数据段;备用:3个字节,其它功能的预留字节;帧校验:前19个字节的按位异或的数值,用于该帧数据的校验。5.根据权利要求3所述的电力机器人专用绝缘斗臂车的控制方法,其特征在于:绝缘斗臂车控制器(15)与电力机器人(5)通讯时,双方需要制定明确的通讯接口协议,该接口协议主要包括发送信息和接收信息两部分;绝缘斗臂车控制器(15)发送给电力机器人(5)的6条机构状态can信息,每条can信息中,不同的can-id号可以代表不同的动作机构,can-data中8个字节数据,具体含义如下:当前位置:2个字节,表示机构当前的位置数据;状态信息:2个字节,字节中的位代表各种状态,如人工操作状态标记、动作指令有效性标记、动作指令执行中标记、机构异动标记、传感器异常标记、机构动作安全限制标记,紧急停止状态标记;备用:1个字节,可用于未来的功能扩展;时间戳数据:3个字节,绝缘斗臂车控制器(15)上电开始,每100ms计数值加1,用于电力机器人(5)的控制系统对绝缘斗臂车的通讯有效性的检查;绝缘斗臂车控制器(15)接收电力机器人(5)发送的can信息,每条can信息中,不同的
can-id号可以代表不同的动作机构,can-data中8个字节数据,具体含义如下:动作方向:2个字节,表示机构运动的方向;目标位置:2个字节,表示电力机器人(5)需要机构运动的目标位置的数据;备用:1个字节,可用于未来的功能扩展;时间戳数据:3个字节,电力机器人(5)的控制系统上电开始,每100ms计数值加1,用于绝缘斗臂车控制器(15)对电力机器人(5)的通讯有效性的检查;接收信息中原本不需要机构动作的运动方向,只需要目标位置并由绝缘斗臂车控制器(15)自动判断方向,但是为了增加电力机器人(5)控制时安全保障的冗余性,仍然要求电力机器人(5)根据当前车体姿态确定机构的运动方向。6.根据权利要求3所述的电力机器人专用绝缘斗臂车的控制方法,其特征在于:绝缘斗臂车与电力机器人(5)的详细通信流程如下:绝缘斗臂车控制器(15)按照接口协议将6条机构状态can信息,发送给wifi-can设备(16),wifi-can设备(16)将can信息格式化为can帧,并将多条can帧打包合并为1个tcp帧,通过wifi发送给电力机器人(5)的控制系统,电力机器人(5)按照接口协议解析数据,获取绝缘斗臂车机构的位置信息和状态信息;电力机器人(5)再根据周边环境情况和绝缘斗臂车信息,规划出电力机器人(5)的运动轨迹,再计算出控制绝缘斗臂车各机构运动的下一个目标点,计算具体运动机构、机构运动的方向、机构运动的目标位置,然后按照绝缘斗臂车动作控制的接口协议,将绝缘斗臂车的6条机构控制指令打包为tcp帧,通过wifi发送给wifi-can设备(16),wifi-can设备(16)再将tcp帧信息拆分为多条can总线指令,发送给绝缘斗臂车控制器(15),绝缘斗臂车控制器(15)在接收到电力机器人(5)的控制指令后,根据绝缘斗臂车控制方法进行相应处理。
技术总结
本发明涉及一种电力机器人专用绝缘斗臂车的控制方法,属于工程设备领域。本发明中所述回转台和支腿均安装在副大梁上,所述直伸臂安装在回转台上,所述平台摆臂安装在直伸臂上,所述平台摆动支架安装在平台摆臂上,所述平台支架安装在平台摆动支架上,所述电力机器人安装在平台支架上,所述平台高度传感器和平台摆动角度传感器均安装在平台摆动支架上,所述平台摆臂摆动角度传感器安装在平台摆臂上,所述臂长度传感器和臂角度传感器均安装在直伸臂上,所述臂回转角度传感器安装在回转台上,所述绝缘斗臂车控制器和WiFi-CAN设备均安装在副大梁上。该绝缘斗臂车可以接收电力机器人的机构位置控制指令,绝缘斗臂车控制器可以控制各机构运动。控制各机构运动。控制各机构运动。
技术研发人员:毛立武 陈晓峰 张仁民 翁卫
受保护的技术使用者:杭州爱知工程车辆有限公司
技术研发日:2022.09.05
技术公布日:2022/11/11
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。