1.本发明涉及城市轨道交通,特别是一种基于智慧运管系统的早间开站方法。
背景技术:
2.截至2021年底,国内已有50个城市开通城市轨道交通,运营线路283条,运营线路总长度9206.8公里。随着我国城市轨道交通的快速发展,地铁车站规模日益庞大,涉及的各类机电、弱电系统种类繁多而又庞杂,给车站站务人员日常运营管理带来了巨大压力。在每天的开站时间之前,车站站务人员需要做好所有的开站准备工作,确认完所有的设备状态,确保车站能安全开放,等待乘客和列车的到来。
3.在车站开放之前,车站站务人员需要完成以下工作:开启环控设备,开启照明系统,测试售检票系统,测试站台门系统,开启站内各处扶梯,开启各出入口卷帘门,开启广播,开启乘客信息系统。传统的开站方法需要站务人员去现场操作开启各出入口卷帘门、各台电扶梯等设备,整个开站过程耗费人工多,耗时长。
技术实现要素:
4.发明目的:本发明的目的是提供一种基于智慧运管系统的早间开站方法,以解决传统人工开站方法耗费人工多,耗时长的缺点。
5.技术方案:本发明所述的一种基于智慧运管系统的早间开站方法,包括以下步骤:(1)通过智慧运管系统启动车站环控系统早间运行模式,开启通风空调系统各设备。
6.早间运行模式的启动是根据运营时间和站厅、站台、新风、回风温湿度等环境数据,利用焓值计算自动确定具体运行模式,其包含:当时,启动小新风模式;当且时,启动全新风模式;当时,启动通风模式。
7.小新风模式表示打开小新风机及风阀,升高空调机组、回排风机运行频率,增加内部空气流动,以加快站台、站厅环境温度降低,满足开站运营环境要求。
8.全新风模式表示关闭小新风机及风阀,升高空调机组、回排风机运行频率,充分利用室外低温空气,以加快站台、站厅环境温度降低,满足开站运营环境要求。
9.通风模式表示关闭小新风机及风阀,关闭动态平衡阀,空调机组、回排风机以较低频率运行,维持站厅、站台环境温度,减少设备能耗,满足开站运营环境要求。
10.式中,表示室外新风焓值,表示室内回风焓值,表示室外温度,表示空调机组送风温度。
11.其空气焓值计算公式为:
式中,表示空气温度,表示单位质量干空气含湿量。
12.式中,表示湿空气压力,表示水蒸气分压力。
13.式中,表示空气相对湿度,表示在当前温度、压力下饱和水蒸气的分压力。
14.式中,t表示绝对温度,c8=-5.8002206*103,c9=1.3914993,c
10
=-4.8640239*10-2
,c
11
=4.1764768*10-5
,c
12
=-1.4452093*10-8
,c
13
=6.5459673。
15.通过环控模式自动开启,为车站运营人员及乘客提供舒适的环境,为高能耗环控设备提供高效精准控制,从而节约电能消耗。
16.(2)通过智慧运管系统启动车站公共区、广告灯正常运行照明模式,开启车站公共区照明系统和广告灯。
17.(3)在智慧运管系统人机界面上显示出入口卷帘门和站台的视频监控画面,供站务人员随时监视。
18.(4)通过智慧运管系统启动广播系统,广播系统开始向乘客播放列车进出站信息。
19.(5)通过智慧运管系统开启乘客信息系统显示屏,显示乘客导向信息。
20.(6)智慧运管系统调取第一部电扶梯视频监控画面,通过视频分析确认电扶梯上没有人员滞留,并由站务人员通过视频监控画面二次确认电扶梯上没有人员滞留后,智慧运管系统启动电扶梯;第一部电扶梯启动后,重复本步骤直到所有电扶梯启动。
21.视频分析确认电扶梯上没有人员滞留按以下步骤进行:(6.1)根据电扶梯在视频画面中的位置,标定视频分析的区域范围。
22.标定电扶梯视频分析的区域范围采用基于bp神经网络的检测区域自动标定算法,步骤如下:(6.1.1)将扶梯监控视频利用相邻帧差技术,获得相邻帧差图像,为了去除各种噪声干扰,对相邻帧差图像进行平滑处理,然后通过最佳阈值分割;0代表扶梯背景,255代表扶梯乘客,从而得到相邻帧差图像的二值图像。
23.(6.1.2)由于扶梯运行会造成扶梯乘客检测不完整,扶梯运行会带来离散的干扰,为了去除这些干扰,因此对二值化图像进行膨胀填补扶梯乘客靠近扶梯部分造成的空洞,腐蚀去除小面积的孤立点。本文采用在图像中位置的不同设定不同的阈值,取得较好的去噪效果。
24.(6.1.3)对于上面处理过的二值图像进行从左向右和从右向左扫描,进而定位左右旋转点,再通过旋转扫描获得扶梯左右边界线,同时在旋转扫描线的交叉位置标定起始点,为接下来的旋转扫描做好记录。
25.(6.1.4)扶梯左右边界线分别绕起始点,旋转外扩3度作为开始和终止位置,以每次旋转1度为步长,扫描整个扶梯区域。按照视场由远到近的方向把扫描线均匀划分成r个区段,根据区段的大小设定相应的连续性阈值,统计每个区段连续度大于阈值的白线段数。
然后构建bp网络模型,由统计的数据作为bp网络的学习样本,统计的白线段数作为bp网络输入值,网络目标的输出值跟人工判定当前扫描位置是否为扶梯来决定。
26.(6.1.5)用bp网络的学习样本数据进行训练,网络收敛之后可以作为判定当前位置是否为扶梯的分类器。实际识别扶梯时,输入统计当前扫描位置的白色像素点数和连续的白色像素点段数归一化后的数据,网络输出值就是当前扫描位置是否为扶梯的判决结果。
27.(6.1.6)在识别出扶梯的基础上,根据每个扶梯最宽时的左右边界线的位置,求出扶梯的中心位置和扶梯宽度,以扶梯中心位置设定高为15像素,占据这个扶梯最宽宽度的三分之二的宽度作为检测区域。大量实验结果证明这种方法设定的检测区域合适,识别效果比较好,能满足实际应用的需要,有效克服镜头移动重新人工设定检测线的难题。
28.(6.2)利用智能算法建立人体图像模型,实现对人体的自动分析识别,从而判断标定区域内是否没有人员滞留。
29.扶梯乘客存在性检测方法是在获得感兴趣区域后,通过一些处理和判决算法,判别出该区域是否为扶梯乘客的通过,目前主要的方法有帧间像素差统计法、帧差积累平均值法、基于yuv虚拟检测区域法等。
30.(6.2.1)帧间像素差统计法
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4-1)其中i,j分别为检测区域各像素点的坐标,i,j分别为检测区域的高度和宽度,y
ij
为检测区域前景的亮度信息,t
yij
为检测区域背景的亮度信息,乘客与背景分割阈值为t0;在零点的取值不同类似于阶跃单位函数。
31.ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4-2)v表示扶梯乘客与背景的差别。若,则可认为有扶梯乘客存在,否则为扶梯背景。这种算法只考虑到了图像的亮度值,当扶梯的亮度值跟背景接近时就检测不出乘客的存在。
32.(6.2.2)帧差积累平均值法
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4-3)式中,分别为前景和背景在像素点位置的亮度值。这种算法把背景帧的积累误差加入到乘客判断中,使得乘客检测效果也不很理想。
33.(6.2.3)基于yuv虚拟检测区域法基于yuv虚拟检测区域法是在待检测图像上的合适位置设置虚拟检测区域,检测区域的作用类似于埋于地下的感应线圈传感器,它的方向与扶梯运行方向垂直。
34.首先获得位于检测区域背景yuv图像,当乘客经过检测区域时,检测区域上的图像就会由于乘客的覆盖而发生改变,由于引入了色差信号,对于乘客颜色跟扶梯背景接近时,乘客也能很容易的检测出来,经过若干帧的检测区域经无乘客、有乘客、无乘客三个状态的
变化,就可以判定有一乘客通过。
35.本文采用的基于yuv虚拟检测区域法是一种简单有效地检测乘客的方法,在多种不同的交通场景中都可以取得较好的检测结果。
36.(7)通过智慧运管系统执行站台门开关测试,确认站台门能够正常开关;站台门开关测试按以下步骤进行:(7.1)智慧运管系统向站台门系统发送开关门测试信号。
37.(7.2)站台门系统收到开关门测试信号后,连续开关门三次。
38.(7.3)站台门系统连续开关门三次后,确认系统正常无故障后向智慧运管系统发送站台门系统正常信号。
39.(7.4)智慧运管系统收到站台门系统正常信号后,确认站台门开关测试通过。
40.(8)通过智慧运管系统执行售检票系统早间自检,确认售检票系统正常;售价票系统早间自检按以下步骤执行:(8.1)智慧运管系统向售检票系统发送自检信号。
41.(8.2)售检票系统收到自检信号后,进行自我检测。
42.(8.3)售检票系统没有故障自检通过后,向智慧运管系统发送自检正常信号。
43.(8.4)智慧运管系统收到售检票系统自检正常信号后,确认售检票系统正常。
44.(9)智慧运管系统调取第一个出入口卷帘门视频监控画面,通过视频分析确认该卷帘门附近没有乘客,并由站务人员通过视频监控画面二次确认该卷帘门附近没有乘客后,智慧运管系统控制卷帘门升起,同时播放声光报警,提醒乘客卷帘门打开前不要靠近;第一个卷帘门开启后,重复本步骤直到所有卷帘门开启;视频分析确认卷帘门附近没有乘客按以下步骤进行:(9.1)根据卷帘门在视频画面中的位置,标定视频分析的区域范围。
45.标定卷帘门视频分析的区域范围采用基于bp神经网络的检测区域自动标定算法,步骤如下:(9.1.1)将卷帘门监控视频利用相邻帧差技术,获得相邻帧差图像,为了去除各种噪声干扰,对相邻帧差图像进行平滑处理,然后通过最佳阈值分割:0代表卷帘门背景,255代表卷帘门附近乘客,从而得到相邻帧差图像的二值图像。
46.(9.1.2)对上述的二值图像进行从左向右和从右向左扫描,进而定位左右旋转点,再通过旋转扫描获得卷帘门左右边界线,同时在旋转扫描线的交叉位置标定起始点,为接下来的旋转扫描做好记录。
47.(9.1.3)卷帘门左右边界线分别绕起始点,旋转外扩3度作为开始和终止位置,以每次旋转1度为步长,扫描整个卷帘门区域。按照视场由远到近的方向把扫描线均匀划分成r个区段,根据区段的大小设定相应的连续性阈值,统计每个区段连续度大于阈值的白线段数。然后构建bp网络模型,由统计的数据作为bp网络的学习样本,统计的白线段数作为bp网络输入值,网络目标的输出值跟人工判定当前扫描位置是否为卷帘门来决定。
48.(9.1.4)用bp网络的学习样本数据进行训练,网络收敛之后可以作为判定当前位置是否为卷帘门的分类器。实际识别卷帘门时,输入统计当前扫描位置的白色像素点数和连续的白色像素点段数归一化后的数据,网络输出值就是当前扫描位置是否为卷帘门的判决结果。
49.(9.1.5)在识别出卷帘门的基础上,根据每个卷帘门最宽时的左右边界线的位置,求出卷帘门的中心位置和卷帘门宽度,以卷帘门中心位置设定高为15像素,占据这个卷帘门最宽宽度的三分之二的宽度作为检测区域。大量实验结果证明这种方法设定的检测区域合适,识别效果比较好,能满足实际应用的需要,有效克服镜头移动重新人工设定检测线的难题。
50.(9.2)利用智能算法建立人体图像模型,实现对人体的自动分析识别,从而判断标定区域内是否没有乘客。
51.卷帘门附近乘客存在性检测方法是在获得感兴趣区域后,通过一些处理和判决算法,判别出该区域是否为卷帘门附近乘客的通过,目前主要的方法有帧间像素差统计法、帧差积累平均值法、基于yuv虚拟检测区域法等。
52.(9.2.1)帧间像素差统计法
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4-1)其中i,j分别为检测区域各像素点的坐标,i,j分别为检测区域的高度和宽度,y
ij
为检测区域前景的亮度信息,t
yij
为检测区域背景的亮度信息,乘客与背景分割阈值为t0;在零点的取值不同类似于阶跃单位函数。
53.ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4-2)v表示卷帘门附近乘客与背景的差别。若,则可认为卷帘门附近有乘客存在,否则为卷帘门背景。这种算法只考虑到了图像的亮度值,当卷帘门的亮度值跟背景接近时就检测不出乘客的存在。
54.(9.2.2)帧差积累平均值法
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4-3)式中,分别为前景和背景在像素点位置的亮度值。这种算法把背景帧的积累误差加入到乘客判断中,使得乘客检测效果也不很理想。
55.(9.2.3)基于yuv虚拟检测区域法基于yuv虚拟检测区域法是在待检测图像上的合适位置设置虚拟检测区域,检测区域的作用类似于埋于地下的感应线圈传感器,它的方向与卷帘门乘客进出方向垂直。
56.首先获得位于检测区域背景yuv图像,当乘客经过检测区域时,检测区域上的图像就会由于乘客的覆盖而发生改变,由于引入了色差信号,对于乘客颜色跟卷帘门背景接近时,乘客也能很容易的检测出来,经过若干帧的检测区域经无乘客、有乘客、无乘客三个状态的变化,就可以判定有一乘客通过。本文采用的基于yuv虚拟检测区域法是一种简单有效地检测乘客的方法,在多种不同的交通场景中都可以取得较好的检测结果。
57.所述智慧运管系统其硬件系统由位于车站的服务器、工作站、触摸式大屏、视频分析系统、智能表计、电扶梯监测系统、风机震动监测系统、智慧测试、wi-fi嗅探、单兵系统、综合监控系统、环控系统、广播系统、乘客信息系统、视频监控系统、售检票系统、门禁系统、
站台门系统组成;其软件系统由系统集成平台、应用软件、数据库以及数据接口软件组成。
58.所述智慧运管系统采用基于bim的车站三维模型,通过bim技术对车站建筑物及车站各类设备进行建模,并按实际位置构建完整的数字孪生bim三维运营场景,基于bim模型构建的车站各类设备关联通过智慧运管系统接入的各类设备的实际状态;早间开站远程控制电扶梯时,首先在数字孪生bim三维运营场景中推送对应电扶梯视频监控实时画面,通过视频分析确认电扶梯上没有人员滞留,并由站务人员通过视频监控画面二次确认对应电扶梯上没有人员滞留时,方可执行远程控制命令,有效保证乘客人身安全;早间开站远程控制出入口卷帘门时,首先在数字孪生bim三维运营场景中推送对应出入口卷帘门视频监控实时画面,通过视频分析确认该卷帘门附近没有乘客,并由站务人员通过视频监控画面二次确认对应出入口卷帘门附近没有乘客后,方可执行远程控制命令,有效保证乘客人身安全;出入口卷帘门处需设置远程联动控制箱,实现远程控制开关;卷帘门内侧、外侧墙壁设置红外对射传感器,能够检测人员通过信息;卷帘门附近设置声光报警装置及就地广播,提醒通过人员注意卷帘下降;卷帘门电机自带力矩传感器,遇到外力时停止降落。
59.有益效果:与现有技术相比,本发明具有如下优点:相比传统开站需要多组人员就地开启设备,本发明基于智慧运管系统,利用其丰富的子系统接口远程开启各设备,结合bim三维模型和视频监控实时画面,在保证安全的前提下,既极大提升了早间开站的效率有效缩短了开站时间,又减少了工作人员数量节约了人工。
附图说明
60.图1为本发明所述方法的步骤流程图;图2为智慧运管系统的结构示意图。
具体实施方式
61.下面结合附图对本发明的技术方案作进一步说明。
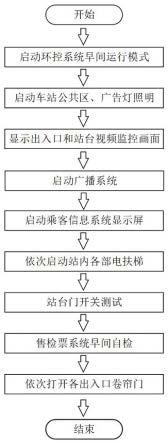
62.如图1所示,一种基于智慧运管系统的早间开站方法,包括以下步骤:(1)通过智慧运管系统启动车站环控系统早间运行模式,开启通风空调系统各设备。
63.早间运行模式的启动是根据运营时间和站厅、站台、新风、回风温湿度等环境数据,利用焓值计算自动确定具体运行模式,其包含:当时,启动小新风模式;当且时,启动全新风模式;当时,启动通风模式。
64.小新风模式表示打开小新风机及风阀,升高空调机组、回排风机运行频率,增加内部空气流动,以加快站台、站厅环境温度降低,满足开站运营环境要求。
65.全新风模式表示关闭小新风机及风阀,升高空调机组、回排风机运行频率,充分利用室外低温空气,以加快站台、站厅环境温度降低,满足开站运营环境要求。
66.通风模式表示关闭小新风机及风阀,关闭动态平衡阀,空调机组、回排风机以较低频率运行,维持站厅、站台环境温度,减少设备能耗,满足开站运营环境要求。
67.表示室外新风焓值,表示室内回风焓值,表示室外温度,表示空调机组送风温度。
68.其空气焓值计算公式为:式中,t表示空气温度,w表示单位质量干空气含湿量。
69.式中,p表示湿空气压力,pw表示水蒸气分压力。
70.式中,表示空气相对湿度,p
ws
表示在当前温度、压力下饱和水蒸气的分压力。
71.式中,t表示绝对温度,c8=-5.8002206*103,c9=1.3914993,c
10
=-4.8640239*10-2
,c
11
=4.1764768*10-5
,c
12
=-1.4452093*10-8
,c
13
=6.5459673。
72.通过环控模式自动开启,为车站运营人员及乘客提供舒适的环境,为高能耗环控设备提供高效精准控制,从而节约电能消耗。
73.(2)通过智慧运管系统启动车站公共区、广告灯正常运行照明模式,开启车站公共区照明系统和广告灯。
74.(3)在智慧运管系统人机界面上显示出入口卷帘门和站台的视频监控画面,供站务人员随时监视。
75.(4)通过智慧运管系统启动广播系统,广播系统开始向乘客播放列车进出站信息。
76.(5)通过智慧运管系统开启乘客信息系统显示屏,显示乘客导向信息。
77.(6)智慧运管系统调取第一部电扶梯视频监控画面,通过视频分析确认电扶梯上没有人员滞留,并由站务人员通过视频监控画面二次确认电扶梯上没有人员滞留后,智慧运管系统启动电扶梯;第一部电扶梯启动后,重复本步骤直到所有电扶梯启动。
78.视频分析确认电扶梯上没有人员滞留按以下步骤进行:(6.1)根据电扶梯在视频画面中的位置,标定视频分析的区域范围。
79.标定电扶梯视频分析的区域范围采用基于bp神经网络的检测区域自动标定算法,可分为如下几个步骤:(6.1.1)将扶梯监控视频利用相邻帧差技术,获得相邻帧差图像,为了去除各种噪声干扰,对相邻帧差图像进行平滑处理,然后通过最佳阈值分割;0代表扶梯背景,255代表扶梯乘客,从而得到相邻帧差图像的二值图像。
80.(6.1.2)由于扶梯运行会造成扶梯乘客检测不完整,扶梯运行会带来离散的干扰,为了去除这些干扰,因此对二值化图像进行膨胀填补扶梯乘客靠近扶梯部分造成的空洞,腐蚀去除小面积的孤立点。本文采用在图像中位置的不同设定不同的阈值,取得较好的去噪效果。
81.(6.1.3)对于上面处理过的二值图像进行从左向右和从右向左扫描,进而定位左右旋转点,再通过旋转扫描获得扶梯左右边界线,同时在旋转扫描线的交叉位置标定起始
点,为接下来的旋转扫描做好记录。
82.(6.1.4)扶梯左右边界线分别绕起始点,旋转外扩3度作为开始和终止位置,以每次旋转1度为步长,扫描整个扶梯区域。按照视场由远到近的方向把扫描线均匀划分成r个区段,根据区段的大小设定相应的连续性阈值,统计每个区段连续度大于阈值的白线段数。然后构建bp网络模型,由统计的数据作为bp网络的学习样本,统计的白线段数作为bp网络输入值,网络目标的输出值跟人工判定当前扫描位置是否为扶梯来决定。
83.(6.1.5)用bp网络的学习样本数据进行训练,网络收敛之后可以作为判定当前位置是否为扶梯的分类器。实际识别扶梯时,输入统计当前扫描位置的白色像素点数和连续的白色像素点段数归一化后的数据,网络输出值就是当前扫描位置是否为扶梯的判决结果。
84.(6.1.6))在识别出扶梯的基础上,根据每个扶梯最宽时的左右边界线的位置,求出扶梯的中心位置和扶梯宽度,以扶梯中心位置设定高为15像素,占据这个扶梯最宽宽度的三分之二的宽度作为检测区域。大量实验结果证明这种方法设定的检测区域合适,识别效果比较好,能满足实际应用的需要,有效克服镜头移动重新人工设定检测线的难题。
85.(6.2)利用智能算法建立人体图像模型,实现对人体的自动分析识别,从而判断标定区域内是否没有人员滞留。
86.扶梯乘客存在性检测方法是在获得感兴趣区域后,通过一些处理和判决算法,判别出该区域是否为扶梯乘客的通过,目前主要的方法有帧间像素差统计法、帧差积累平均值法、基于yuv虚拟检测区域法等。本文采用的基于yuv虚拟检测区域法是一种简单有效地检测乘客的方法,在多种不同的交通场景中都可以取得较好的检测结果。基于yuv虚拟检测区域法是在待检测图像上的合适位置设置虚拟检测区域,检测区域的作用类似于埋于地下的感应线圈传感器,它的方向与扶梯运行方向垂直。首先获得位于检测区域背景yuv图像,当乘客经过检测区域时,检测区域上的图像就会由于乘客的覆盖而发生改变,由于引入了色差信号,对于乘客颜色跟扶梯背景接近时,乘客也能很容易的检测出来,经过若干帧的检测区域经无乘客、有乘客、无乘客三个状态的变化,就可以判定有一乘客通过。
87.(7)通过智慧运管系统执行站台门开关测试,确认站台门能够正常开关。
88.站台门开关测试按以下步骤进行:(7.1)智慧运管系统向站台门系统发送开关门测试信号。
89.(7.2)站台门系统收到开关门测试信号后,连续开关门三次。
90.(7.3)站台门系统连续开关门三次后,确认系统正常无故障后向智慧运管系统发送站台门系统正常信号。
91.(7.4)智慧运管系统收到站台门系统正常信号后,确认站台门开关测试通通过。
92.(8)通过智慧运管系统执行售检票系统早间自检,确认售检票系统正常。
93.售价票系统早间自检按以下步骤执行:(8.1)智慧运管系统向售检票系统发送自检信号。
94.(8.2)售检票系统收到自检信号后,进行自我检测。
95.(8.3)售检票系统没有故障自检通过后,向智慧运管系统发送自检正常信号。
96.(8.4)智慧运管系统收到售检票系统自检正常信号后,确认售检票系统正常。
97.(9)智慧运管系统调取第一个出入口卷帘门视频监控画面,通过视频分析确认该
卷帘门附近没有乘客,并由站务人员通过视频监控画面二次确认该卷帘门附近没有乘客后,智慧运管系统控制卷帘门升起,同时播放声光报警,提醒乘客卷帘门打开前不要靠近;第一个卷帘门开启后,重复本步骤直到所有卷帘门开启。
98.视频分析确认卷帘门附近没有乘客按以下步骤进行:(9.1)根据卷帘门在视频画面中的位置,标定视频分析的区域范围。
99.标定卷帘门视频分析的区域范围采用基于bp神经网络的检测区域自动标定算法,步骤如下:(9.1.1)将卷帘门监控视频利用相邻帧差技术,获得相邻帧差图像,为了去除各种噪声干扰,对相邻帧差图像进行平滑处理,然后通过最佳阈值分割:0代表卷帘门背景,255代表卷帘门附近乘客,从而得到相邻帧差图像的二值图像。
100.(9.1.2)对上述的二值图像进行从左向右和从右向左扫描,进而定位左右旋转点,再通过旋转扫描获得卷帘门左右边界线,同时在旋转扫描线的交叉位置标定起始点,为接下来的旋转扫描做好记录。
101.(9.1.3)卷帘门左右边界线分别绕起始点,旋转外扩3度作为开始和终止位置,以每次旋转1度为步长,扫描整个卷帘门区域。按照视场由远到近的方向把扫描线均匀划分成r个区段,根据区段的大小设定相应的连续性阈值,统计每个区段连续度大于阈值的白线段数。然后构建bp网络模型,由统计的数据作为bp网络的学习样本,统计的白线段数作为bp网络输入值,网络目标的输出值跟人工判定当前扫描位置是否为卷帘门来决定。
102.(9.1.4)用bp网络的学习样本数据进行训练,网络收敛之后可以作为判定当前位置是否为卷帘门的分类器。实际识别卷帘门时,输入统计当前扫描位置的白色像素点数和连续的白色像素点段数归一化后的数据,网络输出值就是当前扫描位置是否为卷帘门的判决结果。
103.(9.1.5)在识别出卷帘门的基础上,根据每个卷帘门最宽时的左右边界线的位置,求出卷帘门的中心位置和卷帘门宽度,以卷帘门中心位置设定高为15像素,占据这个卷帘门最宽宽度的三分之二的宽度作为检测区域。大量实验结果证明这种方法设定的检测区域合适,识别效果比较好,能满足实际应用的需要,有效克服镜头移动重新人工设定检测线的难题。
104.(9.2)利用智能算法建立人体图像模型,实现对人体的自动分析识别,从而判断标定区域内是否没有乘客。
105.卷帘门附近乘客存在性检测方法是在获得感兴趣区域后,通过一些处理和判决算法,判别出该区域是否为卷帘门附近乘客的通过,目前主要的方法有帧间像素差统计法、帧差积累平均值法、基于yuv虚拟检测区域法等。本文采用的基于yuv虚拟检测区域法是一种简单有效地检测乘客的方法,在多种不同的交通场景中都可以取得较好的检测结果。基于yuv虚拟检测区域法是在待检测图像上的合适位置设置虚拟检测区域,检测区域的作用类似于埋于地下的感应线圈传感器,它的方向与卷帘门乘客进出方向垂直。首先获得位于检测区域背景yuv图像,当乘客经过检测区域时,检测区域上的图像就会由于乘客的覆盖而发生改变。由于引入了色差信号,对于乘客颜色跟卷帘门背景接近时,乘客也能很容易的检测出来,经过若干帧的检测区域经无乘客、有乘客、无乘客三个状态的变化,就可以判定有一乘客通过。
106.如图2所示,所述智慧运管系统其硬件系统由位于车站的服务器、工作站、触摸式大屏、视频分析系统、智能表计、电扶梯监测系统、风机震动监测系统、智慧测试、wi-fi嗅探、单兵系统、综合监控系统、环控系统、广播系统、乘客信息系统、视频监控系统、售检票系统、门禁系统、站台门系统组成;其软件系统由系统集成平台、应用软件、数据库以及数据接口软件组成。
107.所述智慧运管系统采用基于bim的车站三维模型,通过bim技术对车站建筑物及车站各类设备进行建模,并按实际位置构建完整的数字孪生bim三维运营场景,基于bim模型构建的车站各类设备关联通过智慧运管系统接入的各类设备的实际状态;早间开站远程控制电扶梯时,首先在数字孪生bim三维运营场景中推送对应电扶梯视频监控实时画面,通过视频分析确认电扶梯上没有人员滞留,并由站务人员通过视频监控画面二次确认对应电扶梯上没有人员滞留时,方可执行远程控制命令,有效保证乘客人身安全;早间开站远程控制出入口卷帘门时,首先在数字孪生bim三维运营场景中推送对应出入口卷帘门视频监控实时画面,通过视频分析确认该卷帘门附近没有乘客,并由站务人员通过视频监控画面二次确认对应出入口卷帘门附近没有乘客时,方可执行远程控制命令,有效保证乘客人身安全;出入口卷帘门处需设置远程联动控制箱,实现远程控制开关;卷帘门内侧、外侧墙壁设置红外对射传感器,能够检测人员通过信息;卷帘门附近设置声光报警装置及就地广播,提醒通过人员注意卷帘下降;卷帘门电机自带力矩传感器,遇到外力时停止降落。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。