1.本发明属船舶摇摆测量领域,尤其涉及一种表面波作用下的船舶摇摆测量演示模型。
背景技术:
2.船舶的摇荡主要有下列六种形式:横摇、纵摇、首摇、垂荡、横荡、纵荡其中,横摇、纵摇和垂荡对船的航行影响最大,而横摇又最容易发生,横摇振幅也最大,严重影响船舶安全。目前,有关船舶摇摆模拟设备主要是通过机械手段模拟摇摆的频次和角度,缺乏模拟在表面波作用下对船舶模型的姿态,摇摆频率、振幅等进行测量。
技术实现要素:
3.本发明旨在克服现有技术的不足之处而提供一种可以模拟在不同种类波的条件下船舶的摇摆姿态和摇摆频率等相关参数,并可将摇摆姿态和其他数据量化成具体参数,得到表面波与船舶摇摆作用规律的表面波作用下的船舶摇摆测量演示模型。
4.为解决上述技术问题,本发明是这样实现的:表面波作用下的船舶摇摆测量演示模型,包括造波水槽、消波区、船舶模型、加速度传感器、姿态传感器、造波机构、第一波高仪、第二波高仪、控制器及下位机;所述消波区位于造波水槽的两端;所述船舶模型置于造波水槽中部区域;所述加速度传感器与姿态传感器分别固定设于船舶模型之上;所述第一波高仪与第二波高仪分别设于船舶模型前后两侧;所述控制器固定设于造波水槽之上;所述造波机构固定设于造波水槽的右侧;所述造波机构包括装配座、伺服电机、丝杆、丝杆托座及推波板;所述丝杆托座设有两个且分别固定设于装配座的左右两侧;所述伺服电机固定设于装配座的右端;所述丝杆托座内设有轴套;所述丝杆套装于轴套上;所述伺服电机的动力输出端与丝杆的端部相接;在所述丝杆上设有传动机构;所述推波板的顶部与传动机构的底部固定相接;所述第一波高仪、第二波高仪、下位机、加速度传感器、姿态传感器及伺服电机的信号传输端口分别与控制器的信号传输端口相接。
5.进一步地,本发明所述传动机构的顶部横向固定设有滑板组件;在所述滑板组件的下部,于造波水槽之上固定设有顶部滑道;所述滑板组件的下部与顶部滑道滑动相接。
6.进一步地,本发明在所述造波水槽底部对应推波板两侧立柱位置沿推波板运动方向固定设有底部滑道。
7.进一步地,本发明所述消波区采用三角柱面多孔网状海绵体结构。
8.进一步地,本发明还设有上位机;所述上位机的信号传输端口与下位机的信号传输端口相接。
9.本发明通过使用造波机产生表面波,使用一系列传感器对船舶模型的各个参数进行测量,从而得到在不同种类、不同参数波的作用下,船舶模型的姿态等参数,进一步研究
船舶在液体表面波作用下的摇摆晃荡姿态与减晃方法。位于造波水槽两侧的消波区可吸收因造波机产生表面波,减少多重波产生的干扰,提升实验的精度。本发明采用伺服电机直接输出转矩来带动丝杆传送,提高了系统的刚性,从而为安装于丝杆上的传动机构获得了高精度的定位功能。
附图说明
10.下面结合附图和具体实施方式对本发明作进一步说明。本发明的保护范围不仅局限于下列内容的表述。
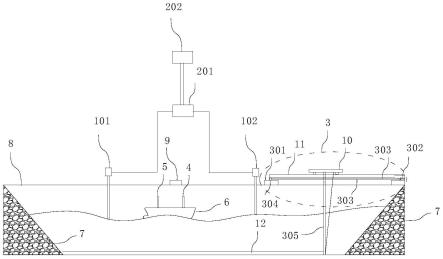
11.图1为本发明整体结构示意图;图2为本发明造波机部分结构示意图;图3为本发明控制部分电路原理框图;图4为本发明造波机控制部分流程框图;图5为本发明加速度传感器和姿态传感器工作原理图。
12.图中:101、第一波高仪;102、第二波高仪;202、上位机;201、下位机;3、造波机构;301、装配座;302、伺服电机;303、丝杆;304、丝杆托座;305、推波板;306、传动机构;4、姿态传感器;5、加速度传感器;6、船舶模型;7、消波区;8、造波水槽;9、控制器;10、滑板组件;11、顶部滑道;12、底部滑道。
具体实施方式
13.如图1、2所示,表面波作用下的船舶摇摆测量演示模型,包括造波水槽8、消波区7、船舶模型6、加速度传感器5、姿态传感器4、造波机构3、第一波高仪101、第二波高仪102、控制器9及下位机201;所述消波区7位于造波水槽8的两端;所述船舶模型6置于造波水槽8中部区域;所述加速度传感器5与姿态传感器4分别固定设于船舶模型6之上;所述第一波高仪101与第二波高仪102分别设于船舶模型6前后两侧;所述控制器9固定设于造波水槽8之上;所述造波机构3固定设于造波水槽8的右侧;所述造波机构3包括装配座301、伺服电机302、丝杆303、丝杆托座304及推波板305;所述丝杆托座304设有两个且分别固定设于装配座301的左右两侧;所述伺服电机302固定设于装配座301的右端;所述丝杆托座304内设有轴套;所述丝杆303套装于轴套上;所述伺服电机302的动力输出端与丝杆303的端部相接;在所述丝杆303上设有传动机构306;所述推波板305的顶部与传动机构306的底部固定相接;所述第一波高仪101、第二波高仪102、下位机201、加速度传感器5、姿态传感器4及伺服电机302的信号传输端口分别与控制器9的信号传输端口相接。
14.本发明所述传动机构306的顶部横向固定设有滑板组件10;在所述滑板组件10的下部,于造波水槽8之上固定设有顶部滑道11;所述滑板组件10的下部与顶部滑道11滑动相接。
15.本发明在所述造波水槽8底部对应推波板305两侧立柱位置沿推波板305运动方向固定设有底部滑道12。
16.本发明所述消波区7采用三角柱面多孔网状海绵体结构。
17.本发明还设有上位机202;所述上位机202的信号传输端口与下位机201的信号传输端口相接。
18.本发明主要研究船舶在液体表面波作用下的摇摆晃荡姿态与减晃方法。通过在船舶模型上安装姿态传感器与振动传感器测量在不同波浪下的船舶姿态与晃荡频率、振幅等参数的研究。
19.本发明造波水槽8可模拟河道及海洋波浪,消波区7使用的是斜坡式海绵消波,主要原理是使波浪通过爬坡的方式消耗掉部分能量,通过多孔网状结构海绵来吸收波浪从而减小波浪的反射。
20.造波机构3通过造波软件根据设置的造波参数及波形生成造波曲线数据,控制器9根据曲线数据控制伺服电机302驱动的丝杆303运动控制推波板305运动。推波板305在水里推动水会激发起相应的波浪,比如推波板以1hz的频率,以
±
50mm的幅度做正弦波运动,经过一段时间的稳定后,在造波水槽8里就能推出
±
47mm左右,1hz的正弦波,因为波浪在运动过程中受空气阻力、水自身重力,水槽壁等环境因素影响造出来的波幅与推板的波幅有一定衰减。造波机构3可以通过第一波高仪101及第一波高仪102测量波形、波高等参数反馈到控制器通过补偿算法来减小这些影响因素,尽量达到我们预设的造波参数(一般造实际造波与理论值误差会在3~5%左右)。造出不同种类不同参数的规则波、不规则波,例如:正弦波、孤立波以及破碎波等,为船舶摇摆提供不同的波源。
21.第一波高仪101及第一波高仪102通过测量仪器位置的水位变化反应波浪曲线,比如按照1秒来算,将1秒分成1000份,每一份就是1ms,波高仪是通过测量第1ms时刻水位高度,第2ms时刻水位高度
……
依次类推,将1000个水位高度点连接成线就得到了这1秒波浪的曲线。
22.传感器工作的基本原理是通过压电晶体受压变形输出电压的方式,测量电压得到加速度,继而计算出加速度的大小。姿态传感器4与加速度传感器5主要为了获得模型的运动状态,其中加速度传感器是用来计算模型的振荡速度(可以是x\y\z三个方向的振动速度及加速度,也可拟合计算到一个三维方向的速度及加速度)、振荡频率,得到了模型运动的加速度,质量是固定的,就可计算出模型在运动方向的惯量、冲量等物理量。加速度传感器是一种能够测量加速度的传感器。通常由质量块、阻尼器、弹性元件、敏感元件和适调电路等部分组成。传感器在加速过程中,通过对质量块所受惯性力的测量,利用牛顿第二定律获得加速度值。根据传感器敏感元件的不同,常见的加速度传感器包括电容式、电感式、应变式、压阻式、压电式等。姿态传感器4根据姿态数据可以知道模型的运动状态,例如:旋转的角度、旋转速度的大小,纵摇、横摇幅度、以及频率等等。通过测每个时刻的角度和角速度,连成线得到了模型的转动、摇摆曲线。这些测量得到的参数对于模拟、分析船舶在航行过程中遇到不同波浪下的姿态控制、速度控制、为我们解决减小船舶在波浪作用下的晃荡办法及控制办法提供理论依据。
23.参见图4及图5所示,各个模块之间的关系如下:在造波水槽8内注入过半的水,造波机构3放置在造波水槽8上方,造波机构3的上部与底部分别装有滑道,即顶部滑道11与底部滑道12,随着造波机构的启动,推波板305前后移动制造与海上相似的波浪。造波水槽8前后运用挡水板制造消波区,使水进入造波水槽8内趋于平静。将船舶模型6放置在造波水槽8内中间部分使其漂浮,在船舶模型6上放置姿态传感器4与加速度传感器5,可得到船舶模型
6在波浪的影响下的测量出纵摇、横摇角度,旋转角度以及各个方向上的加速度、频率、周期,振荡幅度等数据。第一波高仪101及第二波高仪102分别放置于船舶模型6前后,第一波高仪101及第二波高仪102尾部的传感器放置在水平面下方便测量。
24.本发明造波水槽8可设计成长方体,用于承载实验用水,作为模拟海洋环境;造波机构3安装在造波水槽8一侧消波区的前方,通过顶部滑道11与底部滑道12带动推波板305前后移动来制造波浪,可以通过控制推波板305移动频率,模拟不同种类不同参数的规则波、不规则波,为船舶摇摆提供不同的波源;消波区7共有两个,分别位于造波水槽8两侧,材料是三角柱状的海绵,用于吸收所造波浪,减小实验误差;姿态传感器4位于船舶模型6的上部,其主要是利用基于四元数的三维算法和特殊数据融合技术,实时输出以四元数、欧拉角表示的零漂移三维姿态方位数据,通过姿态传感器4可以得到纵摇、横摇角度,旋转角度等数据;加速度传感器5主要测量其变形量并用相关电路转化成电压输出,从而得到各个方向上的加速度、频率、周期,振荡幅度等数据;船舶模型6等比例缩小的小船,漂浮在造波水槽8中模拟海上平台在海中的情况;第一波高仪101与第二波高仪102主要是感应仪器上方的水柱高度的变化测量波浪,第一波高仪101与第二波高仪102分别放置于小船前后,尾部的传感器放置在水平面下方便测量;姿态传感器4、加速度传感器5、第一波高仪101与第二波高仪102分别通过控制器9连接到下位机201,其监测数据可以由下位机201处输出。
25.本发明上位机202为主控机主要负责人机交互、数据处理、图形显示、生成控制命令并对机器的运行状况进行监管。根据已知目标波浪的频谱来计算出推波板305位移的时间序列,通过运动控制系统的输入命令;下位机201通过网络接收上位机202下达的控制命令,运用控制器9来控制,驱动执行机构来完成造波,并采集进行波的数据、工作状态上传至上位机202;控制器9是基于pc的控制卡、独立的plc控制器或者嵌入式计算运动控制器;伺服电机302接收控制器9传出的命令通过功率驱动完成精确地位置和速度伺服控制;执行机构包括伺服电机302、丝杆303、顶部滑道11、底部滑道12以及推波板305,从而进行造波运动。
26.计算机软件根据设置的波形参数计算出波形序列数据(包含电机正(反)转转动圈数、每一圈的转动速度),控制器9按照造波数据驱动伺服电机302执行,带动丝杆303转动,丝杆303将转动转换为传动机构306的直线运动从而带动造波板形成往复运动,改变往复运动曲线就可实现不同类型的造波。
27.设备工作时,通过造波机构3在造波水槽8中产生指定类型的波,并引起船舶模型6随波发生姿态的摇摆的晃动。与此同时,第一波高仪101与第二波高仪102测量出波的波峰和波谷,计算出波的相关参数;船舶模型6上的姿态传感器4和加速度传感器5测量出船舶摇摆的相关参数,并通过控制器9连接到下位机201中。位于造波水槽8两侧的消波区7将吸收产生的波,减少多重波产生的干扰,提升实验的精度。
28.在本发明的描述中,需要理解的是,术语指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
29.在本发明中,除非另有明确的规定和限定,术语
ꢀ“
设置”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是直接相连,也可以通过中间媒介间接相连,对于本领域的普通技术人员而言,可以根据具体情况理解上
述术语在本发明中的具体含义。
30.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。