1.本发明涉及边缘检测技术领域,具体涉及一种边缘检测方法、装置以及存储介质。
背景技术:
2.在面板module段的aoi检测领域,随着工艺技术的更新换代,对于特殊类型的缺陷检出提出了更高精度要求,像原来的微米级的缺陷检出要求,现在升级为亚微米级。
3.然而面板module段的产品产能并未降低,因此在检测精度提升的前提下,势必会带来检测速度的下降,而为了保证产线的节拍时间不能显著下滑。面板所生产的屏幕产品,从尺寸上大致可分为:手表级、手机级、平板级、笔记本电脑级、显示器级、tv级。这其中,屏幕尺寸越小,工艺结构越复杂,对于缺陷检测的要求也越高。相应地,以手机级屏幕检测为例,因为尺寸较小,在原来10μm以上级别的检测精度下,可以使用一个大靶面相机配合合适的镜头,实现对手机屏幕产品的全画幅覆盖或者是有限的几幅或十几幅图像的拼接覆盖;但是现在检测精度提升到亚微米之后,相机的视野范围很小,那么就需要几百张甚至上千张的图像才能够覆盖。
4.其中,面板的边缘存在多种缺陷需要进行检测,不同缺陷需要采用不同的探测参数才能得到较高的成像质量。现有的单探测器检测方法,每次只能以一种探测参数扫描面板,需要完成一种缺陷的检测后,重新设置探测参数后进行下一轮探测,现有的检测方法,检测速度较低,检测时间成本较长。
技术实现要素:
5.本发明主要解决的技术问题是现有的单探测器检测方法,检测速度较低,检测时间成本较长的技术问题。
6.根据第一方面,一种实施例中提供一种边缘检测方法,包括:
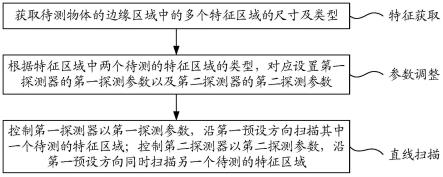
7.特征获取步骤:获取待测物体的边缘区域中的多个特征区域的尺寸及类型;边缘区域中包括多种待检测的预设特征,每种预设特征分布在边缘区域的部分或全部区域,一种预设特征在边缘区域中对应具有一个特征区域;
8.参数调整步骤:根据特征区域中两个待测的特征区域的类型,对应设置第一探测器的第一探测参数以及第二探测器的第二探测参数,其中,第一探测参数与第二探测参数不同,第一探测参数和第二探测参数分别用于检测不同的预设特征;
9.直线扫描步骤:控制第一探测器以第一探测参数,沿第一预设方向扫描其中一个待测的特征区域;控制第二探测器以第二探测参数,沿第一预设方向同时扫描另一个待测的特征区域;其中,第一探测器沿第一预设方向进行运动,第二探测器跟随第一探测器运动。
10.根据第二方面,一种实施例中提供一种边缘检测装置,包括第一探测器、第二探测器、探测器运动系统以及处理终端;
11.第一探测器用于以第一探测参数扫描待测物体的边缘区域的特征区域;
12.第二探测器用于以第二探测参数扫描待测物体的边缘区域的特征区域;其中,边缘区域中包括多种待检测的预设特征,每种预设特征分布在边缘区域的部分或全部区域,一种预设特征在边缘区域中对应具有一个特征区域;第一探测参数与第二探测参数不同,第一探测参数和第二探测参数分别用于检测不同的预设特征;
13.探测器运动系统用于驱动第一探测器沿第一预设方向以及第二预设方向运动,第二探测器跟随第一探测器运动,第一预设方向与第二预设方向正交;探测器运动系统还用于驱动第二探测器相对于第一探测器沿第二预设方向运动;
14.处理终端用于获取待测物体的边缘区域中的多个特征区域的尺寸及类型;根据特征区域中两个待测的特征区域的类型,对应设置第一探测器的第一探测参数以及第二探测器的第二探测参数;控制第一探测器以第一探测参数,沿第一预设方向扫描其中一个待测的特征区域;控制第二探测器以第二探测参数,沿第一预设方向同时扫描另一个待测的特征区域。
15.根据第三方面,一种实施例中提供一种边缘检测装置,包括:
16.存储器,用于存储程序;
17.处理器,用于通过执行存储器存储的程序以实现如第一方面所描述的方法。
18.根据第四方面,一种实施例中提供一种计算机可读存储介质,介质上存储有程序,程序能够被处理器执行以实现如第一方面所描述的方法。
19.依据上述实施例的边缘检测方法、装置以及存储介质,通过第一探测器配置第一探测参数,检测一种预设特征对应的特征区域;同时通过第二探测器配置第二探测参数,检测另一个预设特征对应的特征区域,可以减少单一探测器多次设置探测参数需要的时间,提高检测效率。
附图说明
20.图1为一种实施例提供的待测物体的示意图;
21.图2为一种实施例提供的边缘区域以及特征区域的示意图;
22.图3与图4为一种实施例提供的特征区域的示意图;
23.图5为一种实施例提供的一种边缘检测方法的流程图;
24.图6为一种实施例提供的另一种边缘检测方法的流程图;
25.图7为一种实施例提供的间距调整步骤的过程示意图;
26.图8为一种实施例提供的圆角区域的示意图;
27.图9为另一种实施例提供的一种边缘检测方法的流程图;
28.图10与图12为一种实施例提供的探测器运动的过程示意图;
29.图11与图13为一种实施例提供的圆角扫描的过程示意图;
30.图14与图15为一种实施例提供的边缘检测方法的过程示意图;
31.图16为一种实施例提供的一种边缘检测装置的结构示意图;
32.图17为一种实施例提供的另一种边缘检测装置的结构示意图。
33.附图标记:10-第一探测器;20-第二探测器;30-探测器运动系统;40-物体运动系统;50-处理终端;60-待测物体;100-存储器;200-处理器。
具体实施方式
34.下面通过具体实施方式结合附图对本发明作进一步详细说明。其中不同实施方式中类似元件采用了相关联的类似的元件标号。在以下的实施方式中,很多细节描述是为了使得本技术能被更好的理解。然而,本领域技术人员可以毫不费力的认识到,其中部分特征在不同情况下是可以省略的,或者可以由其他元件、材料、方法所替代。在某些情况下,本技术相关的一些操作并没有在说明书中显示或者描述,这是为了避免本技术的核心部分被过多的描述所淹没,而对于本领域技术人员而言,详细描述这些相关操作并不是必要的,他们根据说明书中的描述以及本领域的一般技术知识即可完整了解相关操作。
35.另外,说明书中所描述的特点、操作或者特征可以以任意适当的方式结合形成各种实施方式。同时,方法描述中的各步骤或者动作也可以按照本领域技术人员所能显而易见的方式进行顺序调换或调整。因此,说明书和附图中的各种顺序只是为了清楚描述某一个实施例,并不意味着是必须的顺序,除非另有说明其中某个顺序是必须遵循的。
36.本文中为部件所编序号本身,例如“第一”、“第二”等,仅用于区分所描述的对象,不具有任何顺序或技术含义。而本技术所说“连接”、“联接”,如无特别说明,均包括直接和间接连接(联接)。
37.现有的面板检测,根据面板的尺寸大小不同,应用的产品不同,检测精度也不相同。对于检测精度在亚微米的探测器而言(以0.5μm为典型代表),在当下的技术水平下,综合考虑探测器的靶面大小、镜头支持的最大靶面等参数,得出一套成本合理的探测器的实际单画幅物方尺寸(定义为探测器的探测尺寸) 大约在1.8mmx1.8mm等毫米级探测尺寸。对于手机屏幕一般在170mmx90mm 等尺寸,就需要拍摄数千张图像。
38.如图1所示,现有的一个屏幕模组,可以包含有五个区域(abcde区)需要进行检测,其中包括了四个边缘区域(bcde区),以b区为例,如图2所示,根据预设特征的不同(可以理解为缺陷的类型不同),b区可以分为四个特征区域(如图2所示的b1至b4),每个特征区域需要探测器调整不同的探测参数(比如光源亮度、相机曝光时间、聚焦高度等),于是为了使每个特征区域都用最佳的参数配置完成检测,需要调整四次探测参数进行扫描。为了方便表示,将b 区的长度方向(图示的上下方向)缩小表示。其中,如图3与图4所示,四个区域之间可以有重叠的部分,每一个区域可以是占据整个b区(如图3所示的 b1)或者是占据部分区域(如图4所示的b2)。
39.现有的检测方式,采用单一探测器对边缘区域进行扫描,对应每一种缺陷对应的特征区域,扫描前需要设定对应的探测参数,以获得最佳的显示效果。因此,扫描效率低,扫描时间长。
40.本技术中,预设特征指的是待测物体上待检测的特征,可以有多种,对应待测物体为面板时,可以是面板的表面缺陷,例如是划痕、裂纹、脏污、颗粒等,不同的缺陷需要检测的区域也并不一定相同。一种缺陷(一种预设特征) 在对应边缘区域上占据的区域定义为特征区域(对应附图3至图5所示的b1、 b2等)。探测参数包括但不限于是探测器对应的光源亮度、相机曝光时间、聚焦高度等参数,最终使得不同的缺陷在获取到的图像中显示的效果不同。
41.在本发明实施例中,通过设置两个探测器分别对不同类型的预设特征进行扫描,在一个探测器扫描一种预设特征对应的特征区域期间,另一个探测器扫描另一种预设特征
对应的特征区域,以提高对待测物体的边缘区域的检测效率。
42.实施例一:
43.请参考图5,本实施例提供一种边缘检测方法,包括:
44.特征获取步骤:获取待测物体的边缘区域中的多个特征区域的尺寸及类型;边缘区域中包括多种待检测的预设特征,每种预设特征分布在边缘区域的部分或全部区域,一种预设特征在边缘区域中对应具有一个特征区域。
45.具体地,特征区域一般对应边缘区域为长条状,一般与边缘区域的长度相同,特征区域的尺寸包括长边尺寸(定义为长度)、短边尺寸(定义为宽度)以及在边缘区域中的位置参数,例如,图4所示的b2特征区域,长度方向对应图示的上下方向,宽度方向对应图示的左右方向。
46.例如,如图2所示,当边缘区域(如图2的b区)具有四种预设特征需要检测时,获取每一种预设特征对应的特征区域的尺寸,假设,b1至b4四个特征区域依次相邻排布,宽度均相同。
47.现有采用单探测器的扫描方式,按照b1
→
b2
→
b3
→
b4的顺序依次扫描,每个特征区域的扫描时间为t1,将对一个特征区域扫描的整体过程定义为一轮扫描。每次(或每轮)扫描前,按照对应的预设特征类型,调整好探测器的探测参数后再进行扫描。此时,需要进行四次探测参数设置,对应有四段参数设定时间t2,总的扫描时间t=4
×
t1 4
×
t2。边缘扫描装置完成一个待测物体后,在等待下一个待测物体上料过程中,可以设定一个探测参数,最多节省一次参数设定的时间,仍需要三次参数设定的时间,提升空间小。
48.参数调整步骤:根据特征区域中两个待测的特征区域的类型,对应设置第一探测器的第一探测参数以及第二探测器的第二探测参数,其中,第一探测参数与第二探测参数不同,第一探测参数和第二探测参数分别用于检测不同的预设特征。
49.例如,如图2所示,在检测特征区域b1与b2时,控制第一探测器设置对应b1的第一探测参数,控制第二探测器设置对应b2的第二探测参数。
50.直线扫描步骤:控制第一探测器以第一探测参数,沿第一预设方向扫描其中一个待测的特征区域;控制第二探测器以第二探测参数,沿第一预设方向同时扫描另一个待测的特征区域;其中,第一探测器沿第一预设方向进行运动,第二探测器跟随第一探测器运动。上述第二探测器跟随第一探测器运动,可以是采用两套运动系统独立驱动两个探测器实现,也可以采用一套探测器整体驱动两个探测器实现。
51.例如,第一探测器对b1特征区域进行扫描,第二探测器对同时b2特征区域进行扫描,在完成b1与b2的扫描后,第一探测器对应b3进行第一探测参数设置,第二探测器对应b4进行第二探测参数设置,在分别对b3与b4特征区域进行扫描。可见总的扫描时间t=2
×
t1 2
×
t2,较于单一探测器,能提成一半以上的时间,如果在完成一个待测物体后,在等待下一个待测物体上料过程中,设定一次探测参数,对应每个待测物体而言,仅需在完成b1与b2的扫描后进行一次探测参数设置,t=2
×
t1 1
×
t2,大大缩小了整体的检测时间。
52.在一种实际应用中,每两个不同的特征区域之间的间距并不相同,其中,特征区域之间的间距指的是,同一侧边缘的平行距离,例如是,如图2中的b1 的最左侧与b2之间的最左侧之间的平行距离。如图6所示,在直线扫描步骤之前,边缘检测方法还可以包括:
53.间距调整步骤:根据特征区域中两个待测的特征区域的间距,调整第一探测器与
第二探测器沿第二预设方向的间距,以使得第一探测器的预设直线扫描路径覆盖一个待测的特征区域,第二探测器的预设直线扫描路径覆盖另一个待测的特征区域,第二预设方向与第一预设方向正交。
54.例如,对于图2所示的边缘区域,四个特征区域之间的扫描顺序有多种,当第一探测器扫描b1的时候,第二探测器可以扫描b2至b4中任一种。此时第一探测器与第二探测器沿第二预设方向的间距(定义为探头间距)就有三种。因此,对应预设的扫描顺序(例如先扫描b1与b2,再扫描b3与b4),在扫描两个待测的特征区域前,对应两个待测的特征区域的间距调整探头间距。
55.进一步说明,如图7所示,在检测b1与b2之间,第一探测器与第二探测器的间距为d1,根据b1与b2两个待测的特征区域的间距d1进行探头间距的间距调整,第二探测器向左移动至虚线框位置。具体第一探测器以及第二探测器的空间位置关系,需要根据边缘区域的宽度,以及探测器的外形尺寸决定。
56.再进一步说明,当存在第一探测器和第二探测器在工作过程中产生误差,使得b1与b2之间产生部分空白区域时,即出现了未被扫描到的区域。可以先分别采用第一探测器和第二探测器对空白区域进行扫描,以判定空白区域具备何种待检测的预设特征,当具备可被第一探测器检出的特征时,采用第一探测器对空白区域进行补充检测;当具备可被第二探测器检出的特征时,采用第二探测器对空白区域进行补充检测;当同时具备可被第一探测器和第二探测器检出的特征时,对空白区域重新划分扫描线,使得扫描线将空白区域划分为区域a、区域b(未图示),并采用第一探测器覆盖区域a扫描,采用第二探测器覆盖区域b扫描,其中,区域a的预设特征可被第一探测器检出,区域b的预设特征可被第二探测器检出。
57.又或者是,扫描每一个特征区域,探测器的扫描路径形成的扫描区域均设置为大于对应的特征区域,例如是扫描区域的宽度以及长度均大于特征区域的 5%-10%,以保证每一个特征区域均被完全扫描,避免空白区域的产生。
58.在一种实际应用中,边缘区域可能具有四种及以上的预设特征需要检测,如图6所示,以边缘区域具有四种预设特征为例,在直线扫描步骤之后,还可以包括:
59.步骤101:完成两个特征区域扫描后,获取下一轮待检测的两个特征区域的尺寸及类型。
60.例如,如图2所示,边缘区域b区具有四种预设特征,对应具有四个特征区域,完成b1与b2两个特征区域扫描后,获取b3与b4两个特征区域的尺寸及类型。
61.步骤102:根据下一轮待检测的两个特征区域的间距,确定是否执行间距调整步骤。
62.例如,如图2所示,b3与b4两个特征区域的间距与b1与b2两个特征区域的间距相同,可以不需要进行间距调整。但是先对b1与b4两个特征区域进行扫描,之后对b2与b3两个特征区域进行扫描,则需要进行间距调整。
63.步骤103:当执行间距调整步骤时,同时执行参数调整步骤,之后执行直线扫描步骤;当不执行间距调整步骤时,依次执行参数调整步骤以及直线扫描步骤;其中,在参数调整步骤中,同时调整第一探测器的第一探测参数以及第二探测器的第二探测参数。
64.通过上述步骤101至步骤103,当需要进行间距调整的时候,在进行参数调整的时
候同时执行间距调整,可以进一步减少间距调整需要的时间。
65.综上所述,通过本实施例提供的边缘检测方法,可以针对边缘区域具有多种预设特征的情况下,采用双探测器进行同时扫描,减少整体扫描轮次以及参数设定需要的时间,提高整体的检测效率。
66.实施例二:
67.现阶段,如手机屏幕、平板电脑屏幕等方形的待测物体,一般四个角为圆弧形的圆角,当圆角半径较大时,容易出现无法被直线扫描覆盖的圆角区域。如图8所示,虚线代表直线扫描的边界,阴影部分区域表示无法被直线扫描覆盖的圆角区域。在本实施例中,待测物体为带圆角的方形,其边缘区域包括四个边缘区域(图8中的bcde区)以及四个圆角区域(图8中的y1至y4)。
68.当边缘区域只有一种预设特征需要被检测的时候,可以采用单探测器按照产品外形的运动轨迹进行顺时针或逆时针扫描,此时圆角区域不会被漏检,但是当边缘区域具有多种预设特征需要被检测时,采用单探测器依旧存在实施例一中描述的技术问题,即探测器需要多次进行探测参数设置,扫描检测效率低。
69.在采用实施例一描述的双探测器的边缘检测方法的基础上,本实施例针对圆角区域的扫描提出进一步改进,以实现在采用双探测器直线扫描的基础上,完成圆角区域的扫描,在保证扫描效率的前提下避免圆角区域漏扫。
70.在本实施例中,如图9所述,边缘检测方法还包括圆角区域步骤,其中,圆角扫描步骤可以包括:
71.步骤201:获取待测物体的圆角区域;其中,沿第一预设方向,两个圆角区域位于边缘区域的两端。
72.例如,如图8所示,以b区为例,在扫描边缘区域(b区)时,b区的长度方向与第一预设方向平行(图示的上下方向),此时,b区的两端分别具有一个圆角区域,在b区进行直线扫描时,两个圆角区域(y1与y2)无法被探测器覆盖。
73.步骤202:如图9所示,在直线扫描步骤之前,控制第一探测器以及第二探测器中距离圆角区域最近的一个,对其中一个圆角区域进行扫描。
74.在实际应用中,如图11与图13所示,在圆角区域进行扫描过程中,控制第一探测器或第二探测器从待测物体的内侧向外侧沿第一预设方向进行逐列扫描,通过多列扫描路径覆盖圆角区域,例如图示中的两列。
75.例如,如图10所示,在采用双探测器进行边缘区域的直线扫描时,当边缘区域的宽度小于两个探测器的探头间距的最小值时,两个探测器并不能并排,只能沿第一预设方向前后设置。如图11所示,当探测器从下向上对b区进行扫描时,如图10所示,此时第一探测器距离下方的圆角区域更近,且第二探测器在第一探测器的下方,第二探测器未进行扫描,因此可以采用第一探测器对下方的圆角区域进行扫描。其中,前后排列的两个探测器增加了直线运动的行进距离,但是直线运动较于探测参数设定需要的时间相比,要少很多,因此,采用双探测器每一个扫描轮次增加的直线运动时间,较于单探测器在进行多次探测参数时间来说,整体上提高的速度还是显著的。
76.更为具体地,当第一探测器位于b区下方圆角区域时,第二探测器并未在有效拍照区域,因此控制第一探测器进行圆角区域y1的任意路径扫描,对第二探测器的拍照没有影
响。于是在进行b区直线扫描前,可以控制第一探测器按照图11所示a1
→
a2
→
a3
→
a4的路径依次完成扫描,以完成该圆角区域y1的扫描。之后第一探测器移动至a5,作为b区直线扫描的起点,沿着a5
→
a6的方向开始直线扫描。
77.步骤203:如图9所示,在直线扫描步骤之后,控制第一探测器以及第二探测器中距离圆角区域最近的一个,对另一个圆角区域进行扫描。
78.例如,如图10所示,当完成b区的直线扫描之后,第二探测器距离b区上方的圆角区域y2更近,且第一探测器位于第二探测器上方,第一探测器已经完成一轮扫描。因此可以采用第二探测器对上方的圆角区域y2进行扫描。
79.更为具体地,当第二探测器完成直线扫描的最后两张拍照之后,即图11中所示的b1和b2,标志着b区第一轮直线扫描结束,此时第一探测器已经处于有效拍照区域之外,第二探测器位于b区上方圆角区域,那么控制第二探测器进行该圆角区域的任意路径扫描,对第一探测器的拍照没有影响,于是第二探测器按照图示所示b3
→
b4
→
b5
→
b6的路径依次完成扫描,以完成该圆角区域 y2的扫描。以此完成b区的第一轮扫描,即完成两种预设特征对应的特征区域的扫描。
80.如图12所示,在针对b区进行第二轮扫描前,第一探测器以及第二探测器针对后续两个待检测的预设特征进行探测参数的重新设置,两个探测器从上向下运动,此时第二探测器依然处于b区上方圆角区域,第二探测器先进行扫描,因此接下来当两个探头完成参数配置之后。如图13所示,控制第二探测器依然按照b1
→
b2
→
b3
→
b4的路径完成扫描,以完成上方圆角区域y2的扫描,之后移动到b5的位置,作为b区第二轮直线扫描的起始位置,沿着b5
→
b6的方向开始直线扫描。当第一探测器完成直线扫描的最后两张拍照之后,即图中所示的a1和a2,标志着b区第二轮直线扫描结束,此时第二探测器已经处于有效拍照区域之外,第一探测器位于b区下方圆角区域y1,那么控制第一探测器进行该圆角区域y1的任意路径扫描,对第二探测器的拍照没有影响,于是第一探测器按照图示所示a3
→
a4
→
a5
→
a6的路径依次完成扫描,以完成下方圆角区域y1的扫描。
81.通过上述边缘检测方法可以完成一个边缘区域以及对应的两个圆角区域的扫描,随后对每一个边缘区域以及对应的两个圆角区域依次执行特征获取步骤、参数调整步骤、直线扫描步骤以及圆角扫描步骤;其中,分别对两个平行的边缘区域以及对对应的圆角区域进行扫描后,转动待测物体90
°
;对剩余的两个平行的边缘区域以及对对应的圆角区域进行扫描,以完成对待测物体四个边缘区域以及四个圆角区域的扫描。
82.在实际应用中,在将待测物体转动90
°
之后,边缘检测方法还可以包括:
83.棱边扫描步骤:控制第一探测器或第二探测器对待测物体中对应边缘区域的棱边进行扫描,得到检测图像。产品的棱边能与边缘区域以及背景明显区分开,可以用于判断是否与第一预设方向平行。
84.转动校准步骤:根据检测图像,判断边缘区域的长度方向与第一预设方向是否平行,当边缘区域的长度方向与第一预设方向平行时,控制第一探测器以及第二探测器扫描边缘区域;当边缘区域的长度方向与第一预设方向不平行时,根据检测图像转动待测物体,重新获取检测图像进行判断,直至边缘区域的长度方向与第一预设方向平行。
85.具体地,对棱边进行一次覆盖扫描,沿第一预设方向的一条直线上任取两个点,a点与b点,分别测量沿第二预设方向,a点与边缘区域的棱边的距离 d 1,以及b点与边缘区
域的棱边的距离d2,当d1与d2之间的差值小于或者等于α时,认为边缘区域的长度方向与第一预设方向平行,此时,可以继续完成后续的扫描;当d1与d2之间的差值大于α时,认为边缘区域的长度方向与第一预设方向不平行,此时需要对转动角度进行微调,微调之后再进行上述棱边扫描步骤。其中,α=0.001mm。
86.或者,对棱边进行一次覆盖扫描,在边缘区域的棱边上任取三个点,a点、 b点与c点,分别测量沿第二预设方向,a点与b点之间的偏移量d1,以及b 点与c点的偏移量d2,,当d1小于或者等于α且d2小于或者等于α时,认为边缘区域的长度方向与第一预设方向平行,此时,可以继续完成后续的扫描;当d1与d2中有一个大于α时,认为边缘区域的长度方向与第一预设方向不平行,此时需要对转动角度进行微调,微调之后再进行上述棱边扫描步骤。其中,α=0.001mm。
87.也就是说,在进行转向后,可以通过一个扫描轮次来确定边缘区域是否与第一预设方向平行。
88.在一种实际应用中,圆角区域一般需要检测所有预设特征,采用上述的圆角扫描步骤之后,并不是每一个圆角区域均能检测所述预设特征。因此,圆角扫描步骤还可以包括:
89.步骤204:如图9所示,对圆角区域进行补充扫描,以使得圆角区域被第一探测器以所有第一探测参数进行扫描以及被第二探测器以所有第二探测参数进行扫描。
90.具体地,在获取边缘区域的所有特征区域,对应预设特征,第一探测器以及第二探测器需要设置的探测参数已经可以对应获得。因此,在完成上述直线扫描以及圆角扫描之后,圆角区域中缺少扫描的预设特征,需要采用对应探测参数进行补充扫描。
91.例如,每个边缘区域的预设特征均相同,包括均具有四种预设特征,因此,每个边缘区域需要采用两个探测器进行两轮扫描,每一轮扫描两种预设特征对应的特征区域。如图14所示,箭头代表探测器的运动方向,在图14的(1)中,先对b区从下向上进行第一轮扫描,圆角区域y1先被第一探测器进行第一种预设特征进行扫描,此时第一探测参数为对应第一种预设特征的配置1;完成b 区第一轮直线扫描后,圆角区域y2被第二探测器进行第二种预设特征进行扫描,此时第二探测参数为对应第二种预设特征的配置2。在图14的(2)中,先对b区从上向下进行第二轮扫描,圆角区域y2先被第二探测器进行第四种预设特征进行扫描,此时第二探测参数为对应第四种预设特征的配置4;完成b区第二轮直线扫描后,圆角区域y1被第一探测器进行第三种预设特征进行扫描,此时第一探测参数为对应第三种预设特征的配置3。
92.同理,如图14中的(3)与(4)所示,d区与b区平行,采用相同的直线扫描以及圆角扫描方式,圆角区域y3被配置1与配置3的探测参数扫描,圆角区域y4被配置2与配置4的探测参数扫描。
93.如图15所示,随后将待测物体逆时针转动90
°
,使得d区和e区的长度方向与第一预设方向平行,对c区以及e区分别进行扫描。
94.具体地,如图15中的(1),先对c区从下向上进行第一轮扫描,圆角区域y2先被第一探测器进行第一种预设特征进行扫描,此时第一探测参数为对应第一种预设特征的配置1。在此之前,圆角区域y2已经被配置2与配置4的探测参数进行了扫描,此时圆角区域y2一共被配置1、配置2与配置4的探测参数进行了扫描。完成c区第一轮直线扫描后,由于在扫描d
区时,圆角区域y4 已经被配置2的探测参数进行了扫描,因此不需要第二探测器以配置2的探测参数重复扫描。在图15的(2)中,先对c区从上向下进行第二轮扫描,由于在扫描d区时,圆角区域y4已经被配置4的探测参数进行了扫描,因此不需要第二探测器以配置4的探测参数重复扫描。完成c区第二轮直线扫描后,圆角区域y2被第一探测器进行第三种预设特征进行扫描,此时第一探测参数为对应第三种预设特征的配置3,此时圆角区域y2一共被配置1、配置2、配置3 与配置4的探测参数进行了扫描,对应完成了四种预设特征的检测。
95.同理,如图15中的(3)与(4)所示,e区与c区平行,采用相同的直线扫描以及圆角扫描,圆角区域y3被配置2与配置4的探测参数扫描,圆角区域y1不需要被配置1与配置3的探测参数重复扫描。
96.可见,在这种情况下,圆角区域y1并未被配置2与配置4的探测参数扫描,以及圆角区域y4并未被配置1与配置3的探测参数扫描。此时,通过对圆角区域y1以及y4进行补充扫描,以使得每一个圆角区域均被四种配置的探测参数进行扫描。
97.通过本实施例提供的边缘检测方法,在提高对边缘区域的检测效率同时,穿插对圆角区域进行扫描,减少单独进行圆角区域扫描需要的重复设置探测参数,提高整体扫描的效率。
98.实施例三:
99.请参考图16,本实施提供一种边缘检测装置,包括第一探测器10、第二探测器20、探测器运动系统30以及处理终端50。
100.第一探测器10用于以第一探测参数扫描待测物体60的边缘区域的特征区域。第二探测器20用于以第二探测参数扫描待测物体60的边缘区域的特征区域;其中,边缘区域中包括多种待检测的预设特征,每种预设特征分布在边缘区域的部分或全部区域,一种预设特征在边缘区域中对应具有一个特征区域;第一探测参数与第二探测参数不同,第一探测参数和第二探测参数分别用于检测不同的预设特征。
101.探测器运动系统30用于驱动第一探测器10沿第一预设方向以及第二预设方向运动,第二探测器20跟随第一探测器10运动,第一预设方向与第二预设方向正交;探测器运动系统30还用于驱动第二探测器20相对于第一探测器10 沿第二预设方向运动,以实现第一探测器10与第二探测器20之间的探头间距的变化。
102.在一种实际应用中,探测器运动系统30采用一个三轴运动系统,整体驱动第一探测器10以及第二探测器20同步运动。在每一轮扫描中,整体驱动第一探测器10以及第二探测器20沿第一预设方向同步运动;在扫描之前,探测器运动系统30在处理终端50的控制下,调整探头间距,对应待扫描的两个特征区域的平行间距。采用一个运动系统整体驱动,避免检测小尺寸待测物体60时,两个运动系统之间存在冲突,或存在空间限制或设计难度限制等问题。
103.处理终端50用于获取待测物体60的边缘区域中的多个特征区域的尺寸及类型;根据特征区域中两个待测的特征区域的类型,对应设置第一探测器10的第一探测参数以及第二探测器20的第二探测参数;控制第一探测器10以第一探测参数,沿第一预设方向扫描其中一个待测的特征区域;控制第二探测器20 以第二探测参数,沿第一预设方向同时扫描另一个待测的特征区域。处理终端 50还用于根据两个待测的特征区域的尺寸,控制探测器运动系统30调整探头间距。例如,处理终端5050可以是计算机或其他终端。
104.在一种实际应用中,在本实施例中,如图1所示,待测物体60可以为方形,例如是手机屏幕,待测物体60的边缘区域包括四个边缘区域,对应图1中的b 区、c区、d区以及e区。边缘检测装置还可以包括物体运动系统40,物体运动系统40用于驱动待测物体60绕待测表面的法线转动。处理终端50还用于控制物体运动系统40,将待测物体60转动预设角度,例如是90
°
。在检测待测物体60时,完成b区检测后,对平行的d区进行检测。随后将待测物体60转动 90
°
,进行c区检测,最后进行e区检测。完成一个待测物体60检测后,反向转动90
°
复位,进行下一个待测物体60的检测。
105.可见,采用本实施例提供的边缘检测装置,可以采用实施例一与实施例二所描述的边缘检测方法进行边缘检测,通过双探测器采用不同的探测参数同时扫描,可以高效率对待测物体60进行检测。
106.如图17所示,本实施例还提供另一种边缘检测装置,包括存储器100以及处理器200。
107.存储器100用于存储程序。处理器200用于通过执行存储器100存储的程序以实现如实施例一与实施例二所描述的方法。具有实施例一与实施例二所描述的方法对应的技术效果,在此不在重复描述。
108.本领域技术人员可以理解,上述实施方式中各种方法的全部或部分功能可以通过硬件的方式实现,也可以通过计算机程序的方式实现。当上述实施方式中全部或部分功能通过计算机程序的方式实现时,该程序可以存储于一计算机可读存储介质中,存储介质可以包括:只读存储器、随机存储器、磁盘、光盘、硬盘等,通过计算机执行该程序以实现上述功能。例如,将程序存储在设备的存储器中,当通过处理器执行存储器中程序,即可实现上述全部或部分功能。另外,当上述实施方式中全部或部分功能通过计算机程序的方式实现时,该程序也可以存储在服务器、另一计算机、磁盘、光盘、闪存盘或移动硬盘等存储介质中,通过下载或复制保存到本地设备的存储器中,或对本地设备的系统进行版本更新,当通过处理器执行存储器中的程序时,即可实现上述实施方式中全部或部分功能。
109.以上应用了具体个例对本发明进行阐述,只是用于帮助理解本发明,并不用以限制本发明。对于本发明所属技术领域的技术人员,依据本发明的思想,还可以做出若干简单推演、变形或替换。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
