1.本实用新型涉及吸盘技术领域。
背景技术:
2.在新能源电池的生产过程中,经常要对电池模组进行吊装作业,由于工艺改进,为了保证模组固定牢固,模组与箱体的间隙尺寸较小,并且模组自由长度比箱体的空间大,模组入箱后模组与箱体无间隙,无法将模组直接送到箱体内部。针对上述存在的问题,研究设计一种新型的兼容多种动力电池模组抓手的吸盘压紧机构,克服现有电池模组吊装作业中所存在的问题是十分必要的。
技术实现要素:
3.为了解决现有的电池模组进行吊装作业中存在的上述问题,本实用新型提供了一种兼容多种动力电池模组抓手的吸盘压紧机构。
4.本实用新型为实现上述目的所采用的技术方案是:一种兼容多种动力电池模组抓手的吸盘压紧机构,包括推力电缸、力传感器、压板、导向轴、吸盘固定板和真空吸盘,所述推力电缸和导向轴与电池模组抓手主体连接,所述推力电缸输出轴、力传感器和压板从上到下依次连接,所述导向轴设置于所述压板四角处,所述吸盘固定板设置于所述压板下端,所述真空吸盘设置于所述吸盘固定板下端。
5.优选的,所述推力电缸通过螺栓与电池模组抓手主体连接,所述导向轴通过螺栓与电池模组抓手主体连接。
6.优选的,所述力传感器上端与所述推力电缸螺纹连接,所述力传感器下端通过螺栓与所述压板中心处连接。
7.优选的,还包括位置传感器,所述位置传感器通过螺栓与所述导向轴连接,且所述位置传感器设置于所述压板的上方。
8.优选的,所述吸盘固定板通过零点快换夹具与所述压板连接。
9.优选的,所述吸盘固定板下端还设有第一导轨、第一模组压条、第二导轨和第二模组压条,所述第一导轨固定连接于所述吸盘固定板下端的一侧,所述第一模组压条滑动连接于所述第一导轨下端,所述第二导轨固定连接于所述吸盘固定板下端的另一侧,所述第二模组压条滑动连接于所述第二导轨下端,所述第二模组压条与所述第一模组压条对称设置。
10.优选的,所述第一模组压条为三个,所述第一导轨为三个,所述第一模组压条通过滑块滑动连接于所述第一导轨下端,所述第二模组压条为三个,所述第二导轨为三个,所述第二模组压条通过滑块滑动连接于所述第二导轨下端。
11.优选的,所述真空吸盘为两个,所述真空吸盘与所述第一模组压条及第二模组压条交错设置。
12.优选的,所述吸盘固定板下端设有吸盘导向轴,所述吸盘导向轴用于推拉真空吸
盘,所述真空吸盘通过弹簧与所述吸盘导向轴连接。
13.优选的,所述真空吸盘为海绵吸盘组件。
14.本实用新型的一种兼容多种动力电池模组抓手的吸盘压紧机构,可以适用于不同形状及规格的电池模组,还可以将电池模组直接送到箱体内部,此外,压板通过零点快换夹具实现与吸盘固定板的快速安装及更换,真空吸盘通过弹簧和吸盘导向轴实现与吸盘固定板的连接,避免了由于高度差等因素,造成无法吸附住电池模组的问题。
附图说明
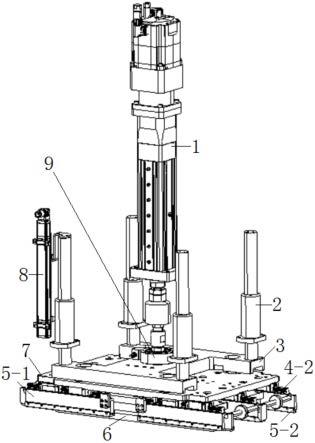
15.图1是本实用新型实施例的立体结构示意图;
16.图2是本实用新型实施例的俯视结构示意图;
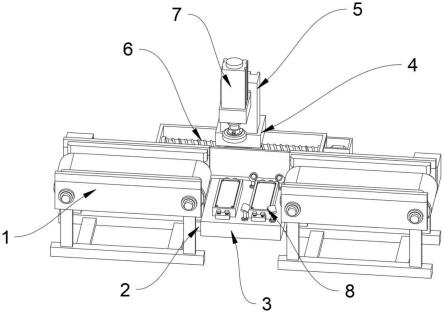
17.图3是本实用新型实施例的仰视结构示意图。
18.图中:1、推力电缸,2、导向轴,3、压板,4-1、第一导轨,4-2、第二导轨,5-1、第一模组压条,5-2、第一模组压条,6、真空吸盘,7、吸盘固定板,8、位置传感器,9、力传感器。
具体实施方式
19.下面结合附图和实施例对本实用新型的实施方式作进一步详细描述。以下实施例用于说明本实用新型,但不能用来限制本实用新型的范围。
20.在本实用新型的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
21.本实施例的一种兼容多种动力电池模组抓手的吸盘压紧机构如图1-2所示,包括推力电缸1、力传感器9、压板3、导向轴2、吸盘固定板7和真空吸盘6,推力电缸1和导向轴2 与电池模组抓手主体连接,推力电缸1输出轴、力传感器9和压板3从上到下依次连接,导向轴2设置于压板3四角处,吸盘固定板7设置于压板3下端,真空吸盘6设置于吸盘固定板7下端。
22.其中,推力电缸1可以通过螺栓与电池模组抓手主体连接,导向轴2可以通过螺栓与电池模组抓手主体连接,力传感器9上端可以与推力电缸1螺纹连接,力传感器9下端可以通过螺栓与压板3的中心处连接。此外,本装置还包括位置传感器8,位置传感器8通过螺栓与导向轴2连接,且位置传感器8设置于压板3的上方。
23.为了使压板3与吸盘固定板7可以快速安装及快速更换吸盘固定板7,吸盘固定板7可以通过零点快换夹具与压板3连接。吸盘固定板7下端还可以设有第一导轨4-1、第一模组压条5-1、第二导轨4-2和第二模组压条5-2,第一导轨4-1固定连接于吸盘固定板7下端的一
侧,第一模组压条5-1滑动连接于第一导轨4-1下端,第二导轨4-2固定连接于吸盘固定板7下端的另一侧,第二模组压条5-2滑动连接于第二导轨4-2下端,第二模组压条5-2与第一模组压条5-1对称设置。如图3所示,
24.第一模组压条5-1可以为三个,同样的第一导轨4-1也可以为三个,第一模组压条5-1 可以通过滑块滑动连接于第一导轨4-1下端,由于第二模组压条5-2与第一模组压条5-1对称设置,所以第二模组压条5-2同样可以为三个,第二导轨4-2为三个,第二模组压条5-2 通过滑块滑动连接于第二导轨4-2下端。真空吸盘6可以为两个,真空吸盘6可以与第一模组压条5-1及第二模组压条5-2交错设置。吸盘固定板7下端设有吸盘导向轴,吸盘导向轴用于推拉真空吸盘6,真空吸盘6通过弹簧与吸盘导向轴连接,弹簧可以使真空吸盘6在吸盘固定板7下端浮动,为了使整个装置的吸力更好,真空吸盘6可以为海绵吸盘组件。
25.使用时,先通过真空吸盘6吸住电池模组,再利用导轨4带动第一模组压条5-1和第二模组压条5-2滑动,使第一模组压条5-1左端与电池模组的左端平齐,使第二模组压条5-2 右端与电池模组的右端平齐,再通过导向轴2向下导向,其中导向轴2可以采用直线轴承导向,确保推力电缸1推动压板3顺畅,压紧电池模组入箱,在此过程中通过位移传感器8 和力传感器9进行监控,入箱后,真空吸盘6释放真空,再用推力电缸1为动力源,导向轴2为导向,带动压板3带动模组压条5回到初始位置。其中真空吸盘6与吸盘固定板7 通过弹簧和吸盘导向轴进行连接,可以保证模组压条5和真空吸盘6无高度差,压板3和吸盘固定板7采用零点快换夹具连接,可以实现兼容多种模组产品,也使压板3和吸盘固定板7可以快速安装,并且零点快换夹具的气动对接接口采用弹簧浮动机构,可以保证压板3和吸盘固定板7之间压紧准确和牢固。
26.本实用新型的实施例是为了示例和描述起见而给出的,而并不是无遗漏的或者将本实用新型限于所公开的形式。很多修改和变化对于本领域的普通技术人员而言是显而易见的。选择和描述实施例是为了更好说明本实用新型的原理和实际应用,并且使本领域的普通技术人员能够理解本实用新型从而设计适于特定用途的带有各种修改的各种实施例。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。