技术特征:
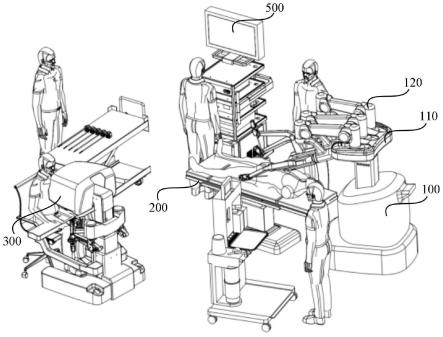
1.一种手术机器人系统,其特征在于,包括控制端、操作端和控制器,所述操作端包括至少一条机械臂,所述控制端与所述操作端具有主从控制关系并用于控制所述机械臂进行操作,所述控制器用于:获取预设手术场景下手术辅助装置的初始位姿信息以及所述机械臂的不动点的初始位置信息;获取所述手术辅助装置的当前位姿信息;根据所述手术辅助装置的初始位姿信息及其当前位姿信息,判断所述手术辅助装置的位姿是否发生变化;若是,则根据所述手术辅助装置的当前位姿信息、所述手术辅助装置的初始位姿信息以及所述不动点的初始位置信息,获取所述不动点的目标位置信息,并根据所述不动点的目标位置信息对应调整所述机械臂的位姿;其中,所述手术辅助装置为能够改变手术场景中手术对象位姿的装置。2.根据权利要求1所述的手术机器人系统,其特征在于,所述控制器用于根据所述手术辅助装置的初始位姿信息以及所述不动点的初始位置信息,获取所述手术辅助装置与所述不动点之间的预设位置映射关系,并根据所述手术辅助装置的当前位姿信息以及所述手术辅助装置与所述不动点之间的预设位置映射关系,获取所述不动点的目标位置信息。3.根据权利要求1所述的手术机器人系统,其特征在于,所述手术辅助装置为用于支撑手术对象的支撑装置。4.根据权利要求1所述的手术机器人系统,其特征在于,所述控制器用于根据不动点的目标位置信息,获取所述机械臂的各关节的目标位置信息,并根据所述机械臂的各关节的目标位置信息以及所述机械臂的各关节的当前位置信息,获取所述机械臂的各关节的运动轨迹,并根据所述机械臂的各关节的运动轨迹,对所述机械臂的各关节的位置进行调整。5.根据权利要求4所述的手术机器人系统,其特征在于,所述控制器用于根据所述机械臂的各关节的目标位置信息以及所述机械臂的各关节的当前位置信息,采用插值算法,获取各所述机械臂的各关节的运动轨迹。6.根据权利要求4所述的手术机器人系统,其特征在于,所述控制器用于对所获取的所述机械臂的各关节的运动轨迹进行抖动抑制处理,并根据抖动抑制处理后的所述机械臂的各关节的运动轨迹,对所述机械臂的各关节的位置进行调整。7.根据权利要求1所述的手术机器人系统,其特征在于,所述控制器用于获取机器人坐标系与世界坐标系之间的映射关系,并根据所述机器人坐标系与世界坐标系之间的映射关系以及所述不动点在世界坐标系下的目标位置信息,获取所述不动点在机器人坐标系下的目标位置信息。8.根据权利要求1所述的手术机器人系统,其特征在于,所述手术机器人系统包括显示装置,所述显示装置用于对各所述机械臂的调整状态进行显示。9.一种调整系统,其特征在于,包括权利要求1至8中任一项所述的手术机器人系统以及定位装置,所述定位装置用于向所述控制器发送手术场景下所述手术辅助装置的位姿信息。10.根据权利要求9所述的调整系统,其特征在于,所述定位装置用于向所述控制器发送机器人坐标系与世界坐标系之间的映射关系,所述控制器用于根据所述不动点在世界坐标系下的初始位置信息以及所述不动点在机器人坐标系下的初始位置信息,对所述定位装
置发送的所述机器人坐标系与所述世界坐标系之间的映射关系进行验证。11.根据权利要求9所述的调整系统,其特征在于,所述调整系统包括手术辅助装置,所述控制器用于控制所述手术辅助装置进行调整运动。12.根据权利要求11所述的调整系统,其特征在于,所述控制器用于获取所述手术辅助装置的安全可调范围,并根据所述安全可调范围,判断所述手术辅助装置的调整运动是否安全。13.根据权利要求12所述的调整系统,其特征在于,所述控制器用于获取手术对象的安全区域,并根据所获取的手术对象的安全区域、机械臂的可调范围以及手术辅助装置的可调范围,获取所述手术辅助装置的安全可调范围。14.一种可读存储介质,所述可读存储介质内存储有计算机程序,所述计算机程序被处理器执行时,实现权利要求1至8中任一项所述的手术机器人系统中的控制器所具有的功能。
技术总结
本发明提供了一种手术机器人系统、调整系统和存储介质,手术机器人系统包括控制端、操作端和控制器,操作端包括至少一条机械臂,控制器用于获取预设手术场景下手术辅助装置的初始位姿信息以及机械臂的不动点的初始位置信息;获取手术辅助装置的当前位姿信息;根据手术辅助装置的初始位姿信息及其当前位姿信息,判断手术辅助装置的位姿是否发生变化;若是,则根据手术辅助装置的当前位姿信息、手术辅助装置的初始位姿信息以及不动点的初始位置信息,获取不动点的目标位置信息,并根据不动点的目标位置信息对应调整机械臂的位姿。本发明可以在无需撤出器械和/或内窥镜的情况下,实现各机械臂实时跟随手术辅助装置的调整而进行相应的调整。而进行相应的调整。而进行相应的调整。
技术研发人员:江磊 张晓波 王家寅 郑阿勇 何超
受保护的技术使用者:上海微创医疗机器人(集团)股份有限公司
技术研发日:2021.05.10
技术公布日:2022/11/10
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。