1.本实用新型涉及体育用品技术领域,尤其涉及跳绳机。
背景技术:
2.专利号为:202122594306.2的一种电动跳绳机,采用的跳绳机本体通过中间的主轴件连接旋转体,旋转通过主轴配合轴承连接,在通过电机通过动力轮连接旋转体的内齿轮带动旋转体旋转,在通过主轴体固定在下壳体座上,使其旋转体可以在下壳体座上固定旋转。
3.但是上述专利的结构缺陷就是:主轴体结构复杂,安装不便,靠一个齿轮带动旋转体内齿传动负载低,噪音大,齿轮易疲劳,影响使用寿命等缺陷。
技术实现要素:
4.本实用新型的目的是为了解决现有技术中存在的问题,而提出的跳绳机。
5.为了实现上述目的,本实用新型采用了如下技术方案:
6.跳绳机,包括上壳体,所述上壳体内固定安装有内固定架,所述内固定架的顶部中心位置固定安装有电机,所述内固定架的底部固定安装有下壳体,所述上壳体和下壳体之间设置有用于旋转的旋转体,所述旋转体内设置有用于驱动旋转体进行旋转的行星齿轮组;
7.所述旋转体的外壁一体成型有连杆连接孔,所述连杆连接孔内可拆卸固定安装有连杆。
8.优选的,还包括固定安装在上壳体顶部内壁的电机控制面板,所述内固定架的顶部分别固定安装有电池和计数感应器,所述电池与电机控制面板连接,所述电机控制面板与电机和计数感应器连接。
9.优选的,所述行星齿轮组包括固定安装在旋转体内壁的齿圈,所述电机的输出轴贯穿内固定架并固定安装有太阳轮,所述内固定架上设置有等距排布的行星齿轮上定位孔,所述下壳体上设置有等距排布的行星齿轮下定位孔,三个行星齿轮上定位孔和三个行星齿轮下定位孔内转动安装有三个行星齿轮,三个行星齿轮与太阳轮和齿圈均啮合。
10.优选的,所述上壳体的顶部内壁一体成型有多个上壳体连接套,所述内固定架的顶部设置有多个与上壳体连接套相适配的上壳体连接柱,所述内固定架和上壳体通过上壳体连接套和上壳体连接柱及螺丝进行固定。
11.优选的,所述内固定架的底部一体成型有多个内固定架连接套,所述下壳体的顶部设置有多个与内固定架连接套相适配的内固定架连接柱,所述内固定架和下壳体通过内固定架连接套和内固定架连接柱及螺丝进行固定。
12.优选的,所述下壳体上设置有多个下壳体盖连接套,所述下壳体盖上设置有多个与下壳体盖连接套相适配的下壳体盖连接柱,所述下壳体盖和下壳体通过下壳体盖连接柱和下壳体盖连接套及螺丝进行固定,所述下壳体盖上固定安装有稳固部。
13.优选的,所述稳固部为吸盘,所述吸盘固定安装于下壳体盖的底部。
14.优选的,所述稳固部为配重块,所述配重块安装于下壳体盖和下壳体之间。
15.与现有技术相比,本实用新型的有益效果是:
16.本实用新型采用行星齿轮组结构来作为动力传递来解决上述问题,首先将电机连接太阳轮作为动力输出主轮,再通过行星齿轮将动力传递到旋转体的齿圈上,在内固定架上设有行星齿轮上定位孔,及在下壳体上设有行星齿轮下定位孔,再将行星齿轮的轴体连接在内固定架和下壳体对应的星齿轮上定位孔和行星齿轮下定位孔里,这样内固定架和下壳体组合定位行星齿轮,就相当于行星轮支架,由于下壳体是固定的,所以行星齿轮只是起到传递动力的作用,这样由太阳轮传递到多个行星齿轮,在由多个行星齿轮传递到旋转体的齿圈上并带动旋转体旋转,再由旋转体带动连杆一起旋转,由于行星传动机构具有结构紧凑,传动功率大,承载高,传动平稳等优点,这样通过行星齿轮组结够可以完美的解决现有的跳绳机结构复杂,使用效率低,使用寿命低、噪音高的缺陷。
附图说明
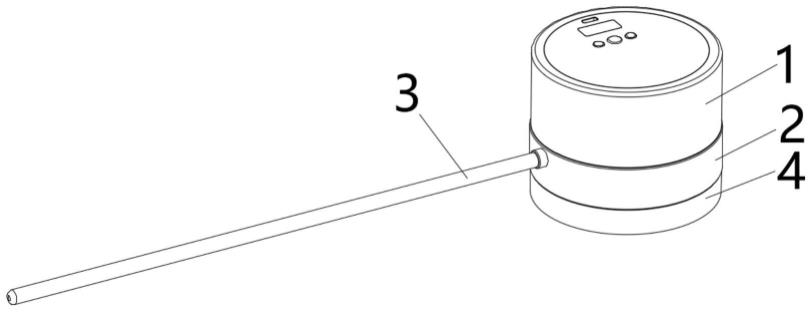
17.图1为本实用新型提出的跳绳机的三维示意图;
18.图2为本实用新型提出的跳绳机的稳固部为吸盘时的分解示意图;
19.图3为本实用新型提出的跳绳机的局部结构分解示意图;
20.图4为本实用新型提出的跳绳机的稳固部为吸盘时的剖视图;
21.图5为本实用新型提出的跳绳机的旋转体与内固定架连接的示意图;
22.图6为本实用新型提出的跳绳机的稳固部为配重块时的分解示意图;
23.图7为本实用新型提出的跳绳机的稳固部为配重块时的剖视图。
24.图中:1、上壳体;2、旋转体;3、连杆;4、下壳体;5、电机控制面板;6、上壳体连接套;7、上壳体连接柱;8、计数感应器;9、电机;10、电池;11、内固定架;12、行星齿轮上定位孔;13、内固定架连接套;14、行星齿轮;15、太阳轮;16、齿圈;17、连杆连接孔;18、内固定架连接柱;19、下壳体盖连接套;20、行星齿轮下定位孔;21、下壳体盖;22、下壳体盖连接柱;23、行星齿轮组;24、稳固部;25、上限位面;26、下限位面。
具体实施方式
25.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
26.实施例一
27.参照图1-图5,跳绳机,包括上壳体1,上壳体1内固定安装有内固定架11,内固定架11的顶部中心位置固定安装有电机9,内固定架11的底部固定安装有下壳体4,上壳体1和下壳体4之间设置有用于旋转的旋转体2,旋转体2内设置有用于驱动旋转体2进行旋转的行星齿轮组23;
28.旋转体2的外壁一体成型有连杆连接孔17,连杆连接孔17内可拆卸固定安装有连杆3。
29.实施例二
30.参照图1-图5,本实用新型提供一种新的技术方案:跳绳机,包括上壳体1,上壳体1内固定安装有内固定架11,上壳体1的顶部内壁一体成型有多个上壳体连接套6,内固定架11的顶部设置有多个与上壳体连接套6相适配的上壳体连接柱7,内固定架11和上壳体1通过上壳体连接套6和上壳体连接柱7及螺丝进行固定,通过上壳体连接套6和上壳体连接柱7及螺丝,便于对内固定架11和上壳体1进行拆装,内固定架11的顶部中心位置固定安装有电机9,内固定架11的底部固定安装有下壳体4,内固定架11的底部一体成型有多个内固定架连接套13,下壳体4的顶部设置有多个与内固定架连接套13相适配的内固定架连接柱18,内固定架11和下壳体4通过内固定架连接套13和内固定架连接柱18及螺丝进行固定,下壳体4上设置有多个下壳体盖连接套19,下壳体盖21上设置有多个与下壳体盖连接套19相适配的下壳体盖连接柱22,下壳体盖21和下壳体4通过下壳体盖连接柱22和下壳体盖连接套19及螺丝进行固定,通过下壳体盖连接柱22和下壳体盖连接套19及螺丝便于对下壳体盖21和下壳体4进行拆装,下壳体盖21上固定安装有稳固部24,稳固部24为吸盘,吸盘固定安装于下壳体盖21的底部,上壳体1和下壳体4之间设置有用于旋转的旋转体2,旋转体2内设置有用于驱动旋转体2进行旋转的行星齿轮组23,行星齿轮组23包括固定安装在旋转体2内壁的齿圈16,电机9的输出轴贯穿内固定架11并固定安装有太阳轮15,内固定架11上设置有等距排布的行星齿轮上定位孔12,下壳体4上设置有等距排布的行星齿轮下定位孔20,三个行星齿轮上定位孔12和三个行星齿轮下定位孔20内转动安装有三个行星齿轮14,三个行星齿轮14与太阳轮15和齿圈16均啮合,通过行星齿轮组23和电机来驱动旋转体2进行旋转;
31.其中旋转体2的顶部与上壳体1的底部形成上限位面25(两者接触面较小,因此摩擦力不大),且旋转体2的顶部与上壳体1的底部均可以设置upe层,两个upe层相接触,且两者之间可以填充润滑脂,以减小摩擦力,同理旋转体2的底部与下壳体4的顶部形成下限位面26(两者接触面较小,因此摩擦力不大),且旋转体2的底部与下壳体4的顶部均可以设置upe层,两个upe层相接触,且两者之间可以填充润滑脂,以减小摩擦力,则可以通过上限位面25和下限位面26对旋转体2进行支撑。
32.计数感应器8原理是通过霍尔感应原理,在旋转体2上设有一强磁铁,在磁铁的上方内固定架11上装有计数感应器8(霍尔感应元件),再通过霍尔感应元件连接电机控制面板5通过电子计算,将数据显示在电机控制面板5的显示屏上,计数方法,旋转体每旋转一圈,霍尔感应元件感应旋转体2上的磁铁一次,这样感应信号传递一次到电机控制面板5上,这样显示屏就显示一次计数,其为本技术领域技术人员公知常识。
33.旋转体2的外壁一体成型有连杆连接孔17,连杆连接孔17内可拆卸固定安装有连杆3,还包括固定安装在上壳体1顶部内壁的电机控制面板5,内固定架11的顶部分别固定安装有电池10和计数感应器8,电池10与电机控制面板5连接,电机控制面板5与电机9和计数感应器8连接。
34.实施例三
35.参照图1、图3、图5、图6和图7,本实用新型提供一种新的技术方案:跳绳机,包括上壳体1,上壳体1内固定安装有内固定架11,上壳体1的顶部内壁一体成型有多个上壳体连接套6,内固定架11的顶部设置有多个与上壳体连接套6相适配的上壳体连接柱7,内固定架11和上壳体1通过上壳体连接套6和上壳体连接柱7及螺丝进行固定,通过上壳体连接套6和上壳体连接柱7及螺丝,便于对内固定架11和上壳体1进行拆装,内固定架11的顶部中心位置
固定安装有电机9,内固定架11的底部固定安装有下壳体4,内固定架11的底部一体成型有多个内固定架连接套13,下壳体4的顶部设置有多个与内固定架连接套13相适配的内固定架连接柱18,内固定架11和下壳体4通过内固定架连接套13和内固定架连接柱18及螺丝进行固定,下壳体4上设置有多个下壳体盖连接套19,下壳体盖21上设置有多个与下壳体盖连接套19相适配的下壳体盖连接柱22,下壳体盖21和下壳体4通过下壳体盖连接柱22和下壳体盖连接套19及螺丝进行固定,通过下壳体盖连接柱22和下壳体盖连接套19及螺丝便于对下壳体盖21和下壳体4进行拆装,下壳体盖21上固定安装有稳固部24,稳固部24为配重块,配重块安装于下壳体盖21和下壳体4之间,上壳体1和下壳体4之间设置有用于旋转的旋转体2,旋转体2内设置有用于驱动旋转体2进行旋转的行星齿轮组23,行星齿轮组23包括固定安装在旋转体2内壁的齿圈16,电机9的输出轴贯穿内固定架11并固定安装有太阳轮15,内固定架11上设置有等距排布的行星齿轮上定位孔12,下壳体4上设置有等距排布的行星齿轮下定位孔20,三个行星齿轮上定位孔12和三个行星齿轮下定位孔20内转动安装有三个行星齿轮14,三个行星齿轮14与太阳轮15和齿圈16均啮合,通过行星齿轮组23和电机来驱动旋转体2进行旋转;
36.旋转体2的外壁一体成型有连杆连接孔17,连杆连接孔17内可拆卸固定安装有连杆3,还包括固定安装在上壳体1顶部内壁的电机控制面板5,内固定架11的顶部分别固定安装有电池10和计数感应器8,电池10与电机控制面板5连接,电机控制面板5与电机9和计数感应器8连接。
37.工作原理:将电机9通过连接内固定架11安装太阳轮15,在将行星齿轮14连接在内固定架11的行星齿轮上定位孔12里,将旋转体2通过齿圈16连接行星齿轮14,再将下壳体4通过内固定架连接柱18和内固定架连接套13配合连接并通过螺丝紧固,再将电池10及计数感应器8安装再内固定架11上,将电机控制面板5安装在上壳体1上,再将电机控制面板5通过线路连接到内固定架11上的电机9,电池10,计数感应器8上,再将上壳体1通过上壳体连接柱7和上壳体连接套6配合连接并并通过螺丝紧固,即可完成安装,由于下壳体4是固定的,所以行星齿轮14只是起到传递动力的作用,这样由太阳轮15传递到多个行星齿轮14,在由多个行星齿轮14传递到旋转体2的齿圈16上并带动旋转体2旋转,再由旋转体2带动连杆3一起旋转。由于行星传动机构具有结构紧凑,传动功率大,承载高,传动平稳等优点,这样通过行星齿轮组23结够可以完美的解决现有的跳绳机结构复杂,使用效率低,使用寿命低、噪音低的缺陷。
38.然而,如本领域技术人员所熟知的,电机控制面板5和电机9及计数感应器8的工作原理和接线方法是司空见惯的,其均属于常规手段或者公知常识,在此就不再赘述,本领域技术人员可以根据其需要或者便利进行任意的选配。
39.以上,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。