1.本发明涉及工程机械领域,特别是一种增程式数控连杆式电动挖掘机。
背景技术:
2.工程机械领域中,挖掘机是最主要的工程机械之一,现在的挖掘机主要有单自由度的机械传动式、液压传动式和多自由度数控连杆式挖掘机。机械式挖掘机所能完成的动作简单,许多动作不能实现;液压式挖掘机可以灵活的执行各种工程动作,但又存在液压系统零部件要求高、寿命不长、易漏油等缺陷,这是工程机械领域一个长期未能取得突破的棘手难题。多自由度数控连杆式挖掘机的输出运动由多个原动件共同决定,是多自变量的函数,通过适当的控制程序就可实现复杂的运动规律,改变控制程序即可改变机构的输出运动,亦输出的柔性化,其电机都可以安装在机架上,避免了在铰接处导致刚性差、惯量大等问题。自由度数控连杆式挖掘机要实现任意的轨迹输出,必须采用数控电机驱动,在各个数控电机配合驱动下,机构输出端才能实现各种挖掘机要求的动作。但是由于电池容量有限,使多自由度数控连杆式电动挖掘机使用时间很短,使用范围很有限。
3.多自由度数控连杆式电动挖掘机的电池需要很大才能满足续航里程和满足挖掘工作时长的要求,电池深度放电会影响电池的使用寿命,而且还必须建立大功率充电站或换电站,在不方便充电的地方只有被迫拖车。
技术实现要素:
4.本发明的目的是提供一种增程式数控连杆式电动挖掘机,实现当电池无法满足续航里程和挖掘工作时长要求时,可以为电池提供电能,以满足续航里程和挖掘工作时长要求而不必就地停下给电池充电,当增程式数控连杆式电动挖掘机不行驶和不进行挖掘工作时,可以通过外接充电方式给电池充电,并且还应可以根据实际情况来切换工作模式。本发明不仅满足挖掘机作业要求,而且具有液压挖掘机承载能力大、受力好等优点,克服传统液压挖掘机维修保养成本高、反应不够灵敏等缺点。
5.本发明通过以下技术方案达到以上目的:
6.本发明所述的一种增程式数控连杆式电动挖掘机包括机架、数控连杆式挖掘机构、车轮及驱动系统,驱动系统设置在机架的下部,车轮设置在机架下部,车轮连接车轮和主动杆控制器,车轮和主动杆控制器连接到驱动系统的输出端,所述的驱动系统包括:车载可充电储能装置、车载辅助供电装置、电动机及减速器,车载可充电储能装置设置在机架上、所述的车载可充电储能装置包括电控模块和电池;车载辅助供电装置设置在机架上,车载辅助供电装置与车载可充电储能装置连接;电动机设置在机架上,电动机连接减速器、减速器连接车轮和主动杆控制器;所述的车载辅助供电装置包括发动机、发电机、离合器c1、离合器c2、离合器c3、以及动力分配机构,所述的动力分配机构是行星齿轮系,发动机的转动轴连接离合器c3,离合器c3连接到发电机主轴的一端,发电机主轴的另一端连接离合器c2;离合器c2连接行星齿轮系的齿圈上,电动机的转动轴连接到行星齿轮系的太阳轮,减速
器的主动轴连接到行星齿轮系的行星架上,减速器的输出轴连接到车轮和主动杆控制器上,车轮和主动杆控制器连接车轮、第一主动杆、第二主动杆以及第三主动杆;发电机连接到电控模块,电控模块连接电池及电动机。
7.所述的数控连杆式挖掘机构包括所述数控连杆式挖掘机构包括动臂、动臂抬升机构、斗杆、斗杆举降机构、铲斗、铲斗翻转机构,所述动臂一端通过第四转动副连接在机架上,动臂另一端通过第五转动副与斗杆连接,所述动臂抬升机构的第一主动杆通过第一转动副连接在机架上,另一端通过第二转动副与第一连杆连接,第一连杆另一端通过第三转动副与动臂连接;所述斗杆通过第五转动副连接在动臂上,另一端通过第七转动副与铲斗连接,所述斗杆举降机构的第二主动杆通过第十五转动副连接到机架上,另一端通过第十四转动副与第二连杆连接,第二连杆另一端通过第十三转动副与斗杆连接;所述铲斗一端通过第七转动副连接在斗杆上,另一端通过第八转动副与拉杆连接,所述铲斗翻转机构由第三主动杆、第三连杆、第一支撑架、第四连杆、摇臂、拉杆组成,第三主动杆一端通过第十六转动副连接到机架上,另一端通过第十七转动副与第三连杆连接,第三连杆另一端通过第十二转动副连接到第一支撑架上,第一支撑架通过第十一转动副连接到斗杆上,第一支撑架另一端通过第十转动副与第四连杆连接,第四连杆另一端通过第九转动副分别与摇臂和拉杆连接,摇臂另一端通过第六转动副与斗杆连接,拉杆另一端通过第八转动副与铲斗连接。
8.所述的电控模块至少包括整流模块、逆变模块以及整流驱动模块,整流模块以及逆变模块并联连接在发电机与电池之间;整流驱动模块设置在电池与电动机之间。
9.所述的电控模块还包括充电模块,充电接口连接到充电模块中。
10.所述的驱动系统分成五种工作状态,分别是低速模式、高速模式、混合低速模式、混合高速模式以及能量回收模式,所述的低速模式下离合器c3松开,离合器c2松开,离合器c1吸合,发动机不工作,电池供电给电动机,电动机带动减速器,减速器带动车轮和主动杆工作。
11.所述的高速模式下离合器c3松开,离合器c2吸合,电池同时给发电机及电动机供电,发电机工作在电动状态,离合器c1松,发电机和电动机带动减速器转动,减速器带动车轮和/或主动杆工作。
12.所述的混合低速模式下离合器c3吸合,离合器c2松开,发电机给电池供电,电池给电动机供电,离合器c1吸合,齿圈固定,电动机带动减速器转动,减速器带动车轮和/或主动杆工作。
13.所述的混合高速模式下离合器c3吸合,离合器c2吸合,发电机给电池供电,电池给电动机供电,离合器c1松开,由发动机及电动机带动减速器转动,减速器带动车轮和/或主动杆工作。
14.所述的能量回收模式下离合器c3松开,离合器c2松开,离合器c1吸合,由车轮带动电动机转动,电动机转动产生的电通过整流驱动模块给电池充电。
15.本发明的突出优点在于:
16.(1)本发明多自由度数控连杆式挖掘机构的输出运动由多个原动件共同决定,是多自变量的函数,通过适当的控制程序就可实现复杂的运动规律,改变控制程序即可改变机构的输出运动,亦输出的柔性化。
17.(2)本发明在电池电量充足时,电池驱动电机,提供整车驱动功率需求,此时发动机不参与工作。当电池电量消耗到一定程度时,发动机启动,发动机为电池提供能量对电池进行充电,只要有加油站就可以一直跑下去,在不方便充电的地方不会被迫拖车,解决基础设施不足的问题,当电池电量充足时,发动机又停止工作,由电池驱动电机,提供整车驱动,能满足增程式数控连杆式电动挖掘机续航里程和挖掘工作时长需求而不必就地停下到充电桩给电池充电。
18.(3)本发明增程式数控连杆电动挖掘机不必建设大型充电设施,晚上充电桩充电,白天有计划的使用电池能量,减少燃油发动机动力,显著提高节油率,发动机可以一直处于最佳工作状态,同时具有刹车能量回收功能,电池可以浅度充放电,电池寿命延长。
19.(4)本发明增程式数控连杆式电动挖掘机可纯电动模式运行,与普通电动挖掘机相比所需电池容量小,造价低且不会发生缺电抛锚现象。本发明不仅能达到液压挖掘机各项工作要求,还具有动作反应迅速,灵敏高效等优点,并且克服了传统液压挖掘机维修保养成本高、液压油路易受环境影响等缺点。
附图说明
20.图1为本发明所述增程式数控连杆式电动挖掘机示意图。
21.图2为本发明所述增程式数控连杆式电动挖掘机原理简图。
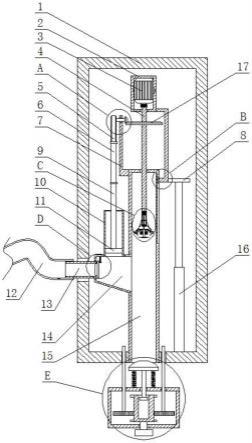
22.图3为本发明所述增程式数控连杆式电动挖掘机车载可充电储能装置示意图。
23.图4为本发明所述增程式数控连杆式电动挖掘机动力分配机构示意图。
24.图5为本发明所述增程式数控连杆式电动挖掘机低速工作模式示意图。
25.图6为本发明所述增程式数控连杆式电动挖掘机高速工作模式示意图。
26.图7为本发明所述增程式数控连杆式电动挖掘机混合低速工作模式示意图。
27.图8为本发明所述增程式数控连杆式电动挖掘机混合高速工作模式示意图。
28.图9为本发明所述增程式数控连杆式电动挖掘机能量回收工作模式示意图。
29.图10为本发明所述增程式数控连杆式电动挖掘机挖掘机构示意图。
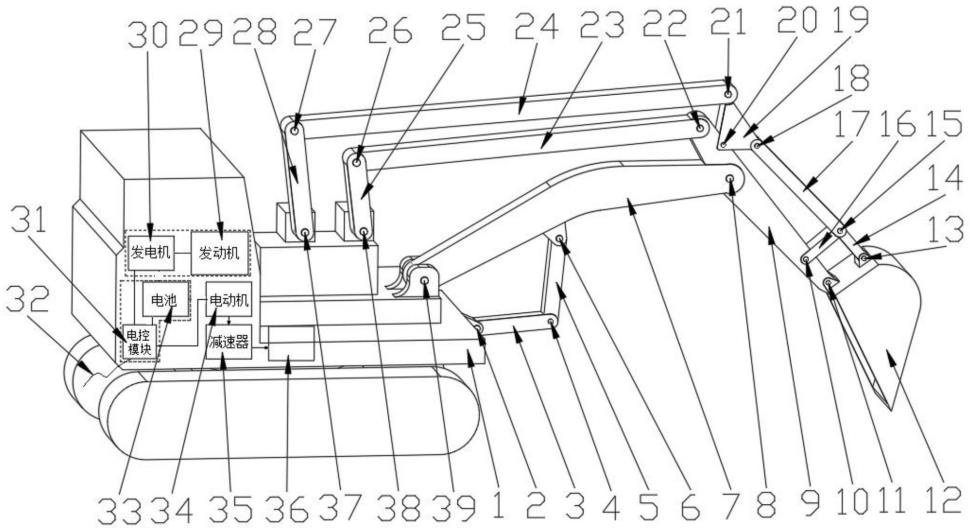
30.图中标记为:机架1、第一转动副2、第一主动杆3、第二转动副4、第一连杆5、第三转动副6、动臂7、第五转动副8、斗杆9、第六转动副10、第七转动副11、铲斗12、第八转动副13、拉杆14、第九转动副15、摇臂16、第四连杆17、第十转动副18、第一支撑架19、第十一转动副20、第十二转动副21、第十三转动副22、第二连杆23、第三连杆24、第二主动杆25、第十四转动副26、第十七转动副27、第三主动杆28、发动机29、发电机30、电控模块31、外接充电方式32、电池33、电动机34、减速器35、车轮和主动杆控制器36、第十六转动副37、第十五转动副38、第四转动副39。
具体实施方式
31.下面结合附图对本发明技术方案作进一步说明。
32.对照图1、图2、图3、图4、图10,本发明所述的一种增程式数控连杆式电动挖掘机包括机架1、数控连杆式挖掘机构、车轮及驱动系统,驱动系统设置在机架1上,车轮设置在机架1下部,车轮1连接车轮和主动杆控制器36,车轮和主动杆控制器36连接到驱动系统的输出端。
33.所述的驱动系统包括:车载可充电储能装置、车载辅助供电装置、电动机34、减速器35,车载可充电储能装置设置在机架1上,车载可充电储能装置包括电控模块31和电池33,电池33连接到电控模块31中;车载辅助供电装置设置在机架1上,车载辅助供电装置与电控模块31连接;电动机34设置在机架1上,电动机34连接减速器35、减速器35连接车轮和主动杆控制器36。
34.对照图1、图2、图3、图4,所述的车载辅助供电装置包括发动机29、发电机30、离合器c1、离合器c2、离合器c3以及动力分配机构。所述的动力分配机构是行星齿轮系,发动机29的转动轴连接离合器c3,离合器c3连接到发电机30主轴的一端,发电机30主轴的另一端连接离合器c2,离合器c2连接连接行星齿轮系的齿圈上,行星齿轮系的太阳轮连接到电动机34转动轴上,减速器35的主动轴连接到行星齿轮系的行星架上。减速器35的输出轴连接到车轮和主动杆控制器36,车轮和主动杆控制器36连接车轮、第一主动杆3、第二主动杆25以及第三主动杆28。发电机30连接到电控模块31,电控模块31连接电池33及电动机34。发动机29用来驱动发电机30给电池33充电,并不直接驱动车轮,也不需要变速箱,相当于在普通的电动车辆上装载了一台汽油/柴油发电机。发电机30一端通过离合器c2与行星齿轮系齿圈相连,另一端通过离合器c3和发动机29相连。所述动力分配机构用来根据车载可充电储能装置的储能情况,来控制动力的分配,当电池33电量不足时,发动机带动发电机,发电机为电池33提供电能,以满足续航里程和挖掘工作时长要求而不必就地停下给电池33充电。
35.行星齿轮系齿圈连接到离合器c2后与发电机连接,齿圈通过离合器c1可受控的锁定到动力分配机构的壳体上,以实现齿圈的固定或转动。
36.对照图1、图2、图3,电控模块31至少包括整流模块、逆变模块以及整流驱动模块,整流模块以及逆变模块并联连接在发电机与电池之间,以实现电池供电给发电机使发电机工作在电动状态时使用或者发电机给电池供电;整流驱动模块设置在电池与电动机之间,使得电动机工作在发电状态时给电池充电或者电池提供电力给电动机工作在电动状态。电控模块31具有外接充电方式32,当增程式数控连杆式电动挖掘机不行驶和不进行装载挖掘工作时,可以用外接充电方式32给电池33充电,当增程式数控连杆式电动挖掘机行驶和进行挖掘工作时,可以打开车载辅助供电装置给电池33充电,以满足续航里程和挖掘工作时长要求而不必就地停下到充电桩给电池33充电。
37.所述电动机是一个能工作在发电以及电动状态的功率较大的电动机,所述的发电机是一个能工作在发电以及电动状态的功率较小的发动机,其中电动机主要用于把动力传递到车轮和主动杆,而发电机主要用于发电。
38.对照图1、图10,所述数控连杆式挖掘机构包括动臂7、动臂抬升机构、斗杆9、斗杆举降机构、铲斗12、铲斗翻转机构,所述动臂7一端通过第四转动副39连接在机架1上,动臂7另一端通过第五转动副8与斗杆9连接,所述动臂抬升机构的第一主动杆3的一端通过第一转动副2连接在机架1上,第一主动杆3另一端通过第二转动副4与第一连杆5的一端连接,第一连杆5的另一端通过第三转动副6与动臂7连接。所述第一主动杆3在位于机架1上的电动机的带动下绕第一转动副2转动,通过第一连杆5传递运动,从而推动动臂7绕第四转动副39抬升。斗杆9通过第五转动副8连接在动臂7上,斗杆9的一端通过第七转动副11与铲斗12连接,斗杆9的一端连接第十三转动副22。
39.斗杆举降机构的第二主动杆25一端通过第十五转动副38连接到机架1上,第二主
动杆25另一端通过第十四转动副26与第二连杆23的一端连接,第二连杆23另一端通过第十三转动副22与斗杆9连接。所述第二主动杆25在位于机架1上的电动机的带动下绕第十五转动副38转动,通过第二连杆23传递运动,从而推动斗杆9升降。
40.所述铲斗翻转机构由第三主动杆28、第三连杆24、第一支撑架19、第四连杆17、摇臂16、拉杆14组成。第三主动杆28一端通过第十六转动副37连接到机架1上,另一端通过第十七转动副27与第三连杆24的一端连接,第三连杆24另一端通过第十二转动副21连接到第一支撑架19的一端,第一支撑架19通过第十一转动副20连接到斗杆9上,第一支撑架19另一端通过第十转动副18与第四连杆17的一端连接,第四连杆17另一端通过第九转动副15分别与摇臂16和拉杆14的一端连接,摇臂16另一端通过第六转动副10与斗杆9连接,拉杆14另一端通过第八转动副13与铲斗12连接。所述第三主动杆28在位于机架1上电动机的带动下绕第十六转动副37转动,通过第三连杆24、第一支撑架19、第四连杆17、摇臂16、拉杆14传递运动,从而推动铲斗12翻转。
41.对照图1、图2、图3、图4、图5、图6、图7、图8、图9,所述车载辅助供电装置和车载可充电储能装置及和电动机之间相互配合组成的驱动系统一共有5种工作模式,分别为:低速模式、高速模式、混合低速模式、混合高速模式及能量回收模式。
42.五种工作模式通过3个离合器来控制动力的分配。所述3个离合器分别命名为离合器c1、离合器c2、离合器c3。
43.低速模式下离合器c1吸合,齿圈固定。离合器c2、离合器c3松开,发电机30以及发动机29停转,此时动力源为电池33,即纯电动模式下工作。
44.高速模式离合器c2吸合,离合器c1、离合器c3松开,发动机29停转,发电机30此时充当电动机工作,推动齿圈转动,电动机推动太阳轮转动,齿圈和太阳轮同时转动,带动行星架转动,从而把动力传到减速器,减速器再将动力传到车轮和主动杆控制器中。发电机30充当电动机推动齿圈转动,降低了与太阳轮连接的另一电动机的转速,提高了其能源使用率。
45.混合低速模式下离合器c1、齿圈固定,离合器c3吸合,离合器c2松开,发动机29运转,发动机29推动发电机30发电,并为电池33充电,同时电池33为电动机供电推动太阳轮转动,行星架跟随太阳轮转动,从而把动力传到车轮和主动杆控制器;
46.混合高速模式离合器c2、离合器c3吸合,离合器c1松开,发动机29与发电机30推动齿圈转动同时发电,电动机推动太阳轮转动,齿圈和太阳轮同时转动,带动行星架转动,从而把动力传到车轮和主动杆控制器,发动机29推动齿圈转动,降低了与太阳轮连接的电动机的转速,提高了其能源使用率;
47.能量回收模式下离合器c1吸合,齿圈固定,离合器c2、离合器c3松开,发动机29以及发电机30停转,车轮带动行星架转动,太阳轮随着行星架转动,此时,电动机作为发电机对电池33充电。
48.在增程式数控连杆式电动挖掘机的实际工作中,可以根据不同的工作模式需要切换工作模式,以满足增程式数控连杆式电动挖掘机续航里程和挖掘工作时长需求。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。