技术特征:
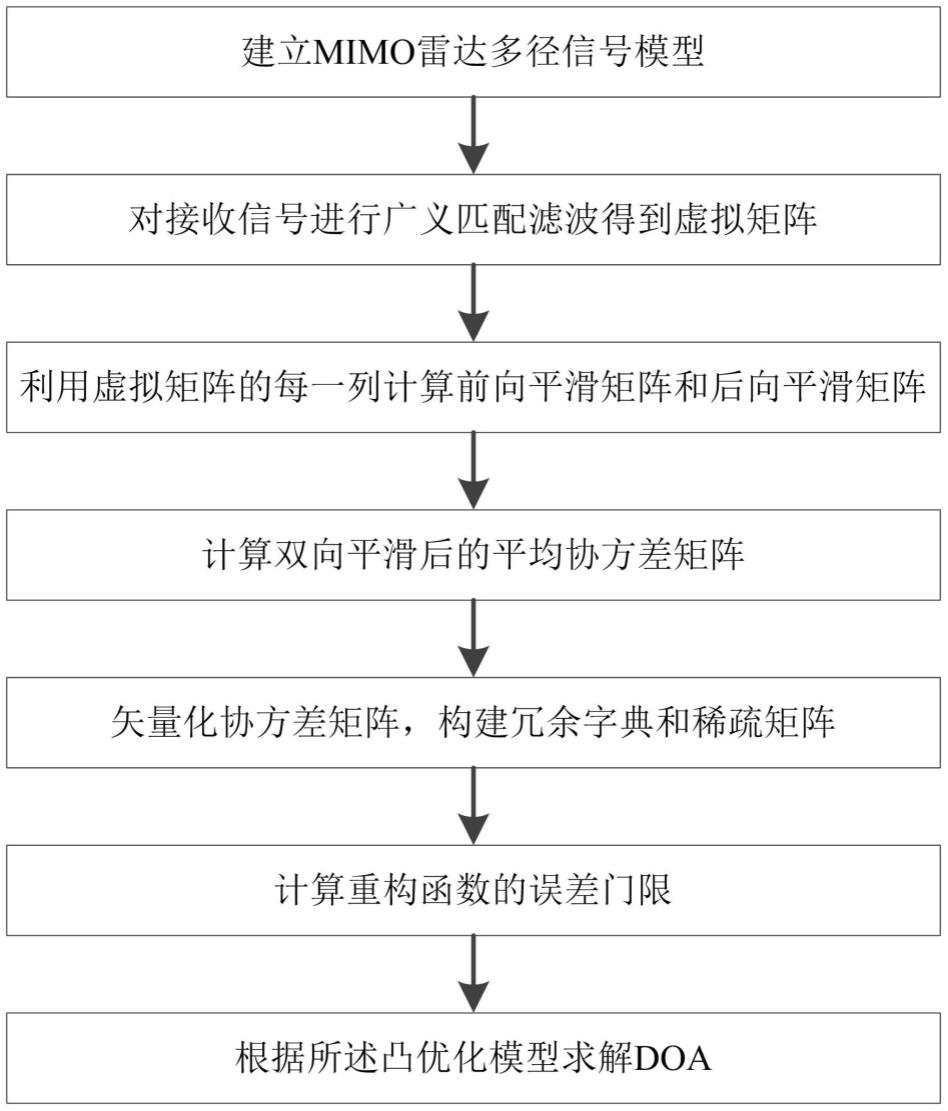
1.一种基于空间平滑稀疏重构的mimo雷达低仰角估计方法,其特征在于,包括以下步骤:步骤一、建立mimo雷达多径效应信号接收模型x(t);步骤二、对接收信号进行广义匹配滤波,得到虚拟矩阵y(t),计算虚拟矩阵每一列的平均协方差矩阵为r
f
(t),然后计算r
f
(t)的反向协方差矩阵r
b
(t);步骤三、根据r
f
(t)和r
b
(t),得到双向空间平滑后的平均协方差矩阵r
fb
,实现对同一目标的直达信号与反射信号的解相干;步骤四、向量化r
fb
得到y,并根据压缩感知原理,构建冗余字典和稀疏矩阵利用凸优化的方式对y进行稀疏重构,得到然后计算双向空间平滑后的平均协方差矩阵r
fb
所有元素误差的方差η2,得到误差门限η,结合误差门限η,对进行转换,得到步骤五、将根据求解得到的稀疏矩阵绘制成空间谱,所述空间谱上的峰值对应的角度即为低空目标仰角的估计值。2.如权利要求1所述的基于空间平滑稀疏重构的mimo雷达低仰角估计方法,其特征在于,步骤一中的mimo雷达多径效应信号接收模型x(t)的具体建立步骤为:设mimo雷达是由m个各向同性阵元组成的均匀线阵,阵元间距为d=λ2,λ为信号波长,空中有k个目标,则m个阵元的发射矩阵为:s
l
(t)=[s
l1
(t) s
l2
(t)
…
s
lm
(t)]
t
其中,s
lm
(t),m=1,2,
…
,m表示第m个阵元的发射信号,并且m个阵元发射的信号两两相互正交;则接收到的k个目标信号为:其中,a(θ)为方向矩阵,a(θ)=[a(θ
d1
),a(θ
r1
),
…
,a(θ
dk
),a(θ
rk
)],a(θ
dk
)表示第k个目标直射波的导向矢量,β
dk
=2πdsinθ
dk
/λ,a(θ
rk
)表示第k个目标反
射波的导向矢量,β
rk
=2πdsinθ
rk
/λ,ω=blkdiag([1 ε1]
t
,
…
,[1 ε
k
]
t
),ε
k
为第k个目标的地面总反射系数,ρ
k
为复数,2πδr
k
/λ为直射波与反射波路程差引起的相位差,(
·
)
t
表示转置,(
·
)
h
表示共轭转置;mimo雷达多径效应信号接收模型x(t)为:x(t)=a(θ)ωαs
r
(t) n(t)=a(θ)ωαω
t
a(θ)
h
s
l
(t) n(t)其中,α表示目标散射系数,α=diag(α1,α2,
…
,α
k
),ω=blkdiag([1 ε1]
t
,
…
,[1 ε
k
]
t
),(
·
)
t
表示转置,n(t)是m个阵元接收到的均值为0,方差为的加性高斯白噪声,且各阵元接收到的噪声互不相关。3.如权利要求1所述的基于空间平滑稀疏重构的mimo雷达低仰角估计方法,其特征在于,步骤二的具体步骤为:2.1、根据步骤一得到的mimo雷达多径效应信号接收模型x(t),对接收信号进行广义匹配滤波,得到虚拟矩阵y(t),y(t)的表达式为:y(t)=e[x(t)s
l
(t)
h
]=aθωω
t
a(θ
h
vt其中,v(t)表示m
×
m维的噪声矩阵,v(t)的每一个元素均服从均值为0、方差为的高斯分布,且互不相关;2.2、对于步骤2.1得到的虚拟矩阵y(t)的第i列,即第i个发射信号经广义匹配滤波后的输出为:y(t)
ci
=a(θ)c
i
′
v(t)
ci
其中,y(t)
ci
表示m
×
1维矩阵,a(θ)为m
×
2k维方向矩阵,c
′
为2k
×
1维矩阵,(
·
)
h
表示共轭转置,v(t)
ci
为v(t)的第i列;2.3、利用虚拟矩阵y(t)各列对应的导向矢量的平移不变性对不同目标的直射信号与反射信号进行解相干,计算得到虚拟矩阵y(t)每一列的平均协方差矩阵为r
f
(t),表达式为:其中,ps为各目标反射到雷达的直射信号功率,由于rank(r
c
)=k,实现了来自不同目标直射与反射信号的合成信号的解相干,i
m
为m
×
m维的单位矩阵,定义矩阵j为m
×
m的变换矩阵,计算得到r
f
(t)的反向协方差矩阵为r
b
(t),表达式为:其中,a(θ)为m
×
2k维方向矩阵,i
m
为m
×
m维的单位矩阵,(
·
)
h
为共轭转置,为方差,(
·
)
*
为取共轭。4.如权利要求1所述的基于空间平滑稀疏重构的mimo雷达低仰角估计方法,其特征在于,步骤三中,所述平均协方差矩阵r
fb
的表达式为:其中,l为快拍数。5.如权利要求1所述的基于空间平滑稀疏重构的mimo雷达低仰角估计方法,其特征在于,步骤四中,所述y的表达式为:其中,vec(
·
)表示矩阵向量化,b(θ)=a(θ)
*
⊙
a(θ)为m2×
2k维矩阵,
⊙
表示khatri-rao积运算,为2k
×
1维功率向量。6.如权利要求1所述的基于空间平滑稀疏重构的mimo雷达低仰角估计方法,其特征在于,步骤四中,所述误差门限η的表达式为:其中,为除对角线元素以外元素的误差,var(
·
)表示求方差,m为阵元数,为协方差矩阵对角元素的误差均为时的方差。
技术总结
本发明公开了一种基于空间平滑稀疏重构的MIMO雷达低仰角估计方法,包括以下步骤:步骤一、建立MIMO雷达多径效应信号接收模型X(t);步骤二、对接收信号进行广义匹配滤波,得到虚拟矩阵Y(t),计算虚拟矩阵每一列的平均协方差矩阵为R
技术研发人员:张宇乐 胡国平 周豪 朱明明 赵方正 占成宏
受保护的技术使用者:中国人民解放军空军工程大学
技术研发日:2022.07.30
技术公布日:2022/11/11
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。