一种获取aoi边界的数据处理系统
技术领域
1.本发明涉及数据处理领域,具体涉及一种获取aoi边界的数据处理系统。
背景技术:
2.poi(point ofinterest)数据是识别城市区域的有力工具,以往常用的是点位信息,用来查看各类城市功能的聚集程度,但忽略了功能区的面积、体积、性质等等内容,而很难反映真实。aoi(area ofinterest)数据是对poi数据的有益补充,第三方服务器等电子地图花费了大量的力气将城市各功能做了边界界定(颜色区分),比如地图软件搜索某个医院时,会圈一个红色区域来表达医院范围(还有相应的建筑形态),但是很多地图软件都只是显示点位,大多数开源数据的数据类型为poi,然而poi的刻画精度不足,不能获得兴趣点的面积,并且很难将poi数据和aoi的数据进行一个结合,现有技术中常使用爬虫的方式的获取poi和aoi的关系,但效果并不理想。
技术实现要素:
3.针对上述技术问题,本发明采用的技术方案为:一种获取aoi边界的数据处理系统,所述获取aoi边界的数据处理包括数据库,处理器和存储有计算机程序的存储器,当所述计算机程序被处理器执行时,实现如下步骤:
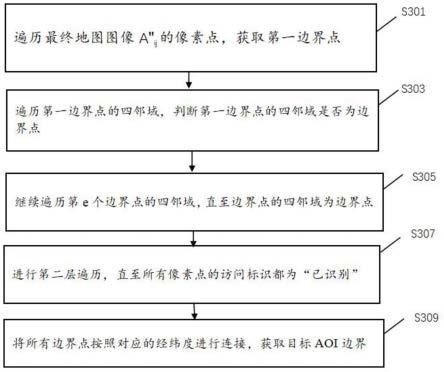
4.s301,遍历最终地图图像a
″
ij
的像素点,获取第一边界点;
5.其中,s301获取第一边界点包括以下步骤:
6.s3011,获取最终地图图像a
″
ij
的所有像素点u
ij
={u
ij1
,
…
,u
ijd
,
…
,u
ije
},u
ijd
是指a
″
ij
的第d个像素点,d的取值范围是1到e,e是指a
″
ij
的像素点的总数量;
7.s3013,获取像素点u
ijd
的像素值;
8.s3015,当像素值g(u
ijd
)=255时,将该点的访问标识标记为“已识别”,遍历下一个点;
9.s3017,当像素值g(u
ijd
)=0时,将该点的访问标识标记为“已识别”且获取u
ijd
的八邻域的像素值;
10.s3019,当u
ijd
任一八邻域的像素值等于255时,确定u
ijd
为第一边界点;
11.s303,遍历第一边界点的四邻域,判断第一边界点的四邻域是否为边界点;
12.s305,继续遍历第e个边界点的四邻域,直至边界点的四邻域为边界点;
13.s307,进行第二层遍历,直至所有像素点的访问标识都为“已识别”;
14.s309,将所有边界点按照对应的经纬度进行连接,获取目标aoi边界。
15.本发明至少具有以下技术效果:通过找到第一个边界点,然后根据边界点找边界点的方法获取完整闭合的目标aoi边界,并将目标poi和目标aoi边界进行关联,从而在使用目标poi的可以关联到目标aoi的边界,更准确地得到关联的aoi的面积。
附图说明
16.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
17.图1为本发明实施例提供的一种获取目标地理图像的数据处理系统执行计算机程序的流程图。
18.图2为本发明实施例提供的一种基于地图图像腐蚀膨胀的数据处理系统执行计算机程序的流程图。
19.图3为本发明实施例提供的的一种获取aoi边界的数据处理系统执行计算机程序的流程图。
具体实施方式
20.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
21.需要说明的是,本发明的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本发明的实施例能够以除了在这里图示或描述的那些以外的顺序实施。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、系统、产品或服务器不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
22.实施例一
23.本发明实施例提供一种获取目标地理图像的数据处理系统,所述获取目标地理图像的数据处理系统包括数据库、处理器和存储有计算机程序的存储器,当所述计算机程序被处理器执行时,实现如下步骤,如图1所示:
24.s101,获取目标poi对应的地理图像集合p={p1,
…
,pi,
…
,pm},pi={p
i1
,
…
,p
ij
,
…
,p
in
},p
ij
=(w
ij
,l
ij
),w
ij
为目标poi对应的第i类型地理图像集合中第j个地理图像的宽度,l
ij
为目标poi对应的第i类型地理图像集合中第j个地理图像的长度;
25.具体地,在s101之前还包括:
26.s1,获取待处理区域的参数信息。
27.具体地,所述参数信息包括待处理区域的大小和形状、划分后的图像总数量、待处理区域的长度x、待处理区域的宽度y。
28.优选地,所述待处理区域为长方形;更优选地,所述待处理区域为正方形。
29.s2,根据待处理区域的参数信息,将待处理区域按照预设方式进行划分,获取目标poi对应的地图类型列表p={p1,
…
,pi,
…
,pm}。
30.在一个实施例中,通过如下预设方式获取图像类型列表p={p1,
…
,pi,
…
,pm}:将
待处理区域划分为每一类型图像,即每一类型图像为一张图像,且相邻图像共用同一条边界。
31.其中,w
ij
符合如下条件:
32.w
ij
=w
(i-1)j
w
α
,其中,w
α
为宽度增长参数因子;
33.其中,l
ij
符合如下条件:
34.l
ij
=l
(i-1)j
l
α
,其中,l
α
为长度增长参数因子;
35.进一步地,w
α
符合如下条件:
36.w
ɑ
=k1*w
1j
;k1为第一尺寸调整因子。
37.l
α
符合如下条件:l
ɑ
=k1*l
1j
。
38.可以理解为,pi的长度和宽度根据p1的长度和宽度的第一尺寸调整因子进行调整,逐步扩大地图图像的长度和宽度。
39.在本发明另一个实施例中,w
α
符合如下条件:
40.w
ɑ
=k2*w
(i-1)j
;k2为第二尺寸调整因子。
41.l
α
符合如下条件:l
ɑ
=k2*l
(i-1)j
。
42.技术效果:可以理解为,pi的长度和宽度根据p
i-1
的长度和宽度的第二尺寸调整因子进行调整,逐步扩大地图图像的长度和宽度,较于直接根据p1进行调整,根据p
i-1
进行调整更为灵活。
43.其中,k2满足如下条件:k2≤1。
44.在本发明s101后还包括如下步骤:
45.s1011,获取第m类型地图图像集合中第j个地理图像p
mj
=(w
mj
,l
mj
);
46.s1013,当w
mj
≥x且l
mj
≥y时,执行s103,其中,x为目标poi对应的目标地图图像的宽度,y为目标poi对应的目标地图图像的长度。
47.基于此,可以理解为,当w
mj
≥x且l
mj
≥y时,第m类型地图图像包括目标poi对应的整个地图图像,确保最大的类型图像包括整个目标地理图象。
48.s103,将p输入至预设的地理图像模型中,获取目标poi对应的目标地理图像,其中,所述目标地理图像为包括目标poi和目标poi对应的边界区域的地理图像。
49.具体地,在地图图像模型输入目标poi对应的地理图像集合p={p1,
…
,pi,
…
,pm}和缩放指数,其中,缩放指数是固定数值,可根据实际情况确定。
50.可选地,在地图图像模型输出目标poi对应的目标地理图像时,可以根据实际需要选择不同区域不同颜色。
51.基于s101-s103,本发明通过步长的迭代,使得可以获取重叠的地图图像,使得获取的aoi边界可以在一张地图图像上完整的呈现出来,避免了aoi边界在多张地图图像上,按照预设的步长获取不同类型图像的长度和宽度,使得每类型图像之间有重叠的部分,避免了aoi被拆分在几张图像中,避免在图像中获取不完整的aoi的边界,因此采用步长获取重叠的图像从而可以在一张图像中获取完整的aoi的边界,避免了在多张地图图像上获取部分的aoi边界需要进行拼接获取完整aoi边界的情况。
52.实施例二
53.本发明还包括一种基于地图图像腐蚀膨胀的数据处理系统,在实施例一的基础上,当所述计算机程序被处理器执行时,实现如下步骤,如图2所示:
54.s201,对目标地理图像进行预处理,获取第一中间地理图像。
55.具体地,对目标地理图像进行预处理包括如下步骤:
56.s2011,将目标地理图像进行图像二值化,获取预备地理图像。
57.具体地,将目标地理图像进行图像二值化是指将目标地理图象的像素点的像素值设置为0或255。
58.在本发明一个实施例中,通过如下步骤实现图像二值化:
59.获取目标地理图像所有像素点的像素值列表s
ij
={s
ij1
,
……
,s
ijx1
,
……
,s
ijx
},s
ijx1
是指目标地理图象第x1个像素点的像素值,x1的取值范围是1到x,x是指目标地理图像中像素点的总数量;当s
ijx1
≥t时,s
′
ijx1
=255;当s
ijx1
《t时,s
′
ijx1
=0;其中,t是指预设灰度阈值,且t可根据实际情况输入,s
′
ijx1
是指第一中间地理图像第x1个像素点的像素值。
60.基于此,对目标地伦理图像进行二值化处理可以减小数据量,减小计算量,使得数据处理系统在运行时占用内存更小,更顺畅。
61.在发明另一个实施例中,通过如下步骤来实现图像二值化:
62.获取目标地理图象所有像素点的像素值列表s
ij
={s
ij1
,
……
,s
ijx1
,
……
,s
ijx
},s
ijx1
是指目标地理图象第x1个像素点的像素值,x1的取值范围是1到x,x是指p
ij
中像素点的总数量;对s
ijx1
,取s
ijx1
周围半径为r的圆形区域,求取圆形区域的区域均值且记为t,t满足如下条件:
63.t=[∑
rs=-r
∑
rt=-r
f(x s,y t)]/(2r 1)2;
[0064]
当s
ijx1
≥t时,s
′
ijx1
=255;当s
ijx1
《t时,s
′
ijx1
=0;s
′
ijx1
是指第一中间地理图像第x1个像素点的像素值。
[0065]
基于此,使用自适应阈值可以根据地图图像的局部特征分别采用不同的阈值,避免整张图像部分区域的阴影或高亮度影响整个图像的预设灰度阈值,从而避免图像二值化的错误判断,提高图像二值化的准确度。
[0066]
s2013,将预备地理图象中的边界块删除,获取第一中间地理图像,所述边界块是指预备地理图像中不包含目标poi对应的边界区域的区域。
[0067]
具体地,通过如下步骤获取边界块:
[0068]
s10,获取边界点b的rgb值b1。
[0069]
s30,获取边界点b的3个邻域的rgb值{b2,b3,b4}。
[0070]
s50,当b1=b
t
时,将b
t
添加到边界块,t=2或t=3或t=4。
[0071]
s70,遍历b
t
对应的边界点的3个邻域。
[0072]
s90,当rgb值均不相同时,结束遍历。
[0073]
基于s10-s90,根据边界点和边界点的邻域获取边界块,将边界块删除,可以理解为,在包含完整aoi边界的地图图像上获取aoi边界,地图图像的边界块并不会包含aoi的完整边界,所以将边界块删除,减小计算量。
[0074]
s203,对第一中间地理图象使用第一卷积核进行膨胀处理,获取第二中间图像图像;
[0075]
具体地,本领域技术人员知晓,第一卷积核由数字“0”“1”构成,且第一卷积核呈现为具有中心点的多种结构,其中,本发明所述第一卷积核可根据实际情况输入。
[0076]
优选地,第一卷积核符合如下条件:s
11
与x*y成正相关关系,s
11
为第一卷积核中“1”的数量,x*y为目标地图图像的面积;
[0077]
在本发明一实施例中,第一卷积核符合如下条件:
[0078]s11
=r1*x*y,r1为第一面积相关系数。
[0079]
具体地,第一卷积核的中心点遍历第一中间地图图像的每一个像素点,被遍历的第一中间地图图像的像素点中,第一卷积核有“1”的位置对应有“255”,则第一卷积核的中心点对应的位置变成255,从而生成第二中间地图图像。
[0080]
s205,对第二中间地图图像使用第二卷积核进行腐蚀处理,获取最终地图图像;
[0081]
其中,第二卷积核符合如下条件:s
21
与x*y成正相关关系且s
11
》s
21
,s21为第二卷积核中“1”的数量。
[0082]
具体地,本领域技术人员知晓,第一卷积核和第二卷积核的位数相同。
[0083]
在本发明一实施例中,第二卷积核符合如下条件:
[0084]s21
=r2*x*y,r2为第二面积相关系数
[0085]
可选地,r1≥r2;优选地,r1》r2。
[0086]
具体地,第二卷积核的中心点遍历第二中间地图图像的每一个像素点,被遍历的第二中间地图图像的像素点中,第二卷积核有“1”的位置对应有“0”,则第二卷积核的中心点对应的位置变成“0”,从而生成最终地图图像;
[0087]
具体地,在s205后还包括:
[0088]
s2051,获取第二中间地图图像中膨胀的像素点数a1;
[0089]
s2053,获取最终地图图像中腐蚀的像素点数a2;
[0090]
s2055,a1和a2满足如下条件:
[0091]a1-a2=a,a为预设膨胀宽度值。
[0092]
基于此,对第一中间地图图像使用第一卷积核和第二卷积核进行膨胀腐蚀,且第一卷积核中“1”的数量大于第二卷积核中“1”的数量,可以理解为,对第一中间地图图像膨胀的范围大于对第二中间地图图像腐蚀的范围,即经过膨胀腐蚀的操作后,原本白色区域会一定程度地增加,可以使得第一中间地图图像中相邻的待处理区域中间的白色区域扩大,或者对于一些特殊情况,例如第一中间地图图像待处理区域中间的有白色和黑色的间隔情况,经过腐蚀膨胀后,可以使得白色区域能够连接,在进行aoi边界识别时能够更加准确地识别出aoi边界。
[0093]
实施例三
[0094]
在实施例二的基础上,当所述计算机程序被处理器执行时,对最终地图图像列表a
″
实现如下步骤,如图3所示:
[0095]
s301,遍历最终地图图像a
′
ij
的像素点,获取第一边界点;
[0096]
其中,最终地图图像a
″
ij
每一像素点均具有访问标识,访问标识是指用于判断a
″
ij
对应的像素点是否被识别,进一步地,访问标识为“1”或者“0”;可以理解为,本领域技术人员知晓,当a
′
ij
对应的像素点被识别后,访问标识为“1”或者“0”;否则,当a
″
ij
对应的像素点未被识别时,访问标识为“0”或者“1”。
[0097]
优选地,当a
″
ij
对应的像素点被识别后,访问标识为“1”;否则,当a
′′
ij
对应的像素点未被识别时,访问标识为“0”。
[0098]
具体的,获取第一边界点包括以下步骤:
[0099]
s3011,获取最终地图图像a
″
ij
的所有像素点u
ij
={u
ij1
,
…
,u
ijd
,
…
,u
ije
},u
ijd
是指a
″
ij
的第d个像素点,d的取值范围是1到e,e是指a
″
ij
的像素点的总数量;
[0100]
s3013,获取像素点u
ijd
的像素值;
[0101]
s3015,当像素值g(u
ijd
)=255时,将该点的访问标识标记为“1”,遍历下一个点;
[0102]
s3017,当像素值g(u
ijd
)=0时,将该点的访问标识标记为“1”且获取u
ijd
的八邻域的像素值;
[0103]
s3019,当u
ijd
任一八邻域的像素值等于255时,确定u
ijd
为第一边界点;
[0104]
基于s3011-s3019,获取最终地图图像的像素点,根据像素值判断是否为第一边界点,直至寻找到第一边界点,同时将已经判断过是否为第一边界点的像素点的访问标识标记为“1”,再次进行访问时可以通过访问标识直接跳过,不进行访问,节省时间,提高效率。
[0105]
s303,遍历第一边界点的四邻域,判断第一边界点的四邻域是否为边界点;
[0106]
具体地,根据s805-s807判断是否为边界点;
[0107]
s305,继续遍历第e个边界点的四邻域,直至边界点的四邻域为边界点;
[0108]
s307,进行第二层遍历,直至所有像素点的访问标识都为“1”;
[0109]
具体地,所述第二层遍历是指第一边界点之后按照第一层遍历继续进行遍历,所述第一层遍历是指s301-s305找到第一边界点获取完整边界的遍历。
[0110]
基于s301-s307,对最终地图图像进行遍历,获取第一边界点,通过第一边界点的四邻域寻找下一个边界点,直至找到完整的闭合的边界,通过边界找边界的方法,比直接遍历所有像素点更快、更便捷;同时将访问过的像素点的访问标识标记为“1”,便于在第二层遍历时的遍历速度更快,同时第二次遍历可以发现aoi边界中包含另一个aoi边界的情况,避免aoi边界中包含另一个aoi边界的这种情况没被发现,从而更全面完整地获取最终地图图像中所有aoi的边界。
[0111]
在本发明另一实施例中,还可以通过以下步骤获取边界点:
[0112]
s3031,获取最终地图图像a
″
ij
的像素c*h;其中,c是指最终地图图像的宽是c个像素,h是指最终地图图像的长是h个像素;
[0113]
s3033,获取r
ji
、q
ji
、r
ij
、q
ji
,其中,
[0114]rji
=f
ji 1-f
ji
;q
ji
=f
ji-f
ji 1
;r
ij
=k
ij 1-k
ji
;q
ji
=k
ji-k
ji 1
;其中,f
ji 1
是指最终地图图像中第i 1行第j个像素点的像素值,f
ji
是指最终地图图像中第i行的第j个像素值,k
ji 1
是指最终地图图像中第i 1列第j个像素点的像素值,k
ji
是指最终地图图像中第i列第j个像素点的像素值;
[0115]
s3035,当r
ji
≠0时,将r
ji
存入目标集;当q
ji
≠0时,将q
ji
存入目标集;当r
ij
≠0时,将r
ij
存目标集;当q
ji
≠0时,将q
ji
存入目标集;所述目标集用于存储边界点。
[0116]
s309,将所有边界点按照对应的经纬度进行连接,获取目标aoi边界;
[0117]
具体地,基于目标aoi边界大小确定抽样数量,对边界点进行抽样获取目标边界点,按照对应的经纬度进行连接,获取目标aoi边界。
[0118]
其中,本领域技术人员知晓,任何一种已知点的经纬度进行连接获取闭合边界的方法均属于本发明保护范围,此处不再赘述。
[0119]
s311,将目标poi与目标aoi边界进行关联;
[0120]
具体地,本领域技术人员知晓,现有技术中任何一种将目标poi和目标aoi边界进
行关联的方法均属于本发明保护范围,例如使用关联表的方法将目标poi和目标aoi边界关联起来。
[0121]
基于本发明,首先通过第三方服务器获取待处理区域的地图图像和poi,在获取过程中,使用步长迭代的方式获取地图图像,使得地图图像有重叠的部分,从而可以在1张地图图像获取到完整的目标aoi边界;对获取的第一中间地图图像进行膨胀腐蚀操作,使得原本不明显或者断连的边界处可以更明显,便于在后续过程中获取目标aoi边界;通过找到第一个边界点,然后根据边界点找边界点的方法获取完整闭合的目标aoi边界,并将目标poi和目标aoi边界进行关联,从而在使用目标poi的可以关联到目标aoi的边界,更准确地得到关联的aoi的面积。
[0122]
虽然已经通过示例对本发明的一些特定实施例进行了详细说明,但是本领域的技术人员应该理解,以上示例仅是为了进行说明,而不是为了限制本发明的范围。本领域的技术人员还应理解,可以对实施例进行多种修改而不脱离本发明的范围和精神。本发明开的范围由所附权利要求来限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。