1.本发明涉及基于激光雷达的机场清障处理系统及方法。
背景技术:
2.随着现代机场不断的发展和人流量的增加,对于智慧机场的建设日益迫切。机场内跑道异物的发现和清除是靠人为保障和牵引。机场跑道异物(foreing object of debris)是指散落在机场跑道上的可能损伤飞机的某种不属于跑道设施的外来物质,如金属固件、防水塑料布、小石块、橡胶块、纸片、落叶等。fod可能造成飞行器轮胎损坏、发动机叶片吸入损坏等故障,从而引起起飞中断、航班延误等事故和损失,甚至会由此引起空难,危机乘客的生命安全,引起巨大的经济损失和机场安全运行。人为排查和清理跑道异物时间上会有不及时性以及不漏排等问题。因此机场的安全运营对fod可靠探测和快速处置系统提出了迫切需求。本使用新型发明可以有效的解决人为排查跑道时间延误和漏排等情况,能够全天候、全时段、及时、准确、全面的解决上述问题。
3.fod的来源种类繁杂,主要包括除地勤人员、机场基础环境设施基础运营设备外,外来的不属于机场跑道的橡胶块、金属物件、草团、动物等。fod一直是影响通航机场正常安全运行的重要因素,每年都造成了难以计量的机场直接和间接损失。国际、国内目前对机场跑道异物的检测工作主要有两种方式。主流是传统人工方式但是此方式缺点明显在大型机场繁忙时中间检查的时间有限,跑道巡检的质量和效率都难以充分保证。另一种方式为光学摄像机加雷达的方式组成。目前大型机场多用此种方式,但是雷达扫描图像不清晰,而光学摄像机受天气和环境因素影响较大,所以需要对雷达成像进一步分析处理,更加清晰准确的判断fod的物理形态数据,结合图像处理技术会对以上问题有明显改观。目前图像处理技术中图像去躁技术应用最为广泛,在去噪技术中,目前研究成果最多的就是小波理论分析。图像处理技术中,图像去噪技术最为活跃和应用广泛。但是传统去躁技术针对数字图像的去噪效果不佳,无法有效区分图像边缘细节信息和高频噪声部分,以实现去噪图像信息的完全重构等问题,致使fod检测技术在实际应用当中识别率较差,误报率较高等问题较为突出。
4.机场现有雷达及摄像机配套的云台,通用性差,现有雷达及摄像机配套的云台一般都是360旋转配合人工或自动俯仰,但是,当其更换的其他雷达进行更换时,造成云台必须对应的匹配更换,重新定义坐标,拆装容易损伤雷达。
技术实现要素:
5.针对现有技术的以下不足,目前国外已成功研制出几款不同的检测设备,主要采用雷达检测、视频图像、可见光等技术,国内虽未研制出成品,但也在积极参与探究。国内主要靠人为检测,人为检测存在以下问题:1)在流量高峰期,人和设备很难上跑道;2)在恶略天气下,人为检测难度大;3)人为很难做到全时段检测。
6.本发明所要解决的技术问题总的来说是提供一种基于激光雷达的机场清
障处理系统及方法。
7.为解决上述问题,本发明所采取的技术方案是:
8.一种基于激光雷达的机场清障处理系统,其应用环境为机场,在机场上设置有塔台、登机桥;
9.所述系统包括在机场上设置有下落开口,在机场设定区域地下设置有地下通道;在地下通道中设置有用于传送垃圾箱体的传动带组;
10.在传动带组具有条带间隙,在下落开口下方设置有下落工位;
11.传动带组通过下落工位;在下落开口处设置有铰接对开门;铰接对开门卡合间隙方向与传动带组传送方向相同;
12.在下落工位,设置有位于传动带组上行段下方设置有底部支撑座,在底部支撑座上设置有下升降座,在下升降座上设置有二级升降座;在二级升降座上铰接有铰接l型座的支点;
13.在铰接l型座立板背面上部设置有配重座部及后卷扬机部;在二级升降座上设置有位于配重座部下方的二级支撑架,在二级支撑架上设置有后部挂环,用于与后卷扬机部通过绳索连接;
14.在铰接l型座横板下部设置有前卷扬机部,在下升降座上设置有前部挂环,用于与前卷扬机部通过绳索连接;
15.下落开口用于通过水平放置的垃圾箱体。
16.作为上述技术方案的进一步改进:
17.在下落开口上方一侧工艺底座。
18.垃圾箱体底部具有底部滚轮且背面具有侧部滚轮;在垃圾箱体正面斜上方设置有正向上面开口。
19.一种基于激光雷达的机场清障处理方法,执行以下步骤;当盛有垃圾的垃圾箱体需要回收时,首先,将下落开口打开,下升降座上升,使得铰接l型座到达下落开口;然后,通过机械手或人工将垃圾箱体送到铰接l型座上;其次,铰接l型座下降,使得垃圾箱体落在传动带组上并输到集中回收;
20.当空载的垃圾箱体需要放置时,首先,平躺的垃圾箱体通过传动带组送到下落工位;然后,铰接l型座上升将平躺的垃圾箱体向上通过打开后的下落开口;其次,二级升降座继续上升,使得铰接l型座的横板从竖直状态变成水平状态并斜向下状态,垃圾箱体变为竖立后并自动离开l型座的横板;
21.其中,通过配重座部的重力,在前卷扬机部及后卷扬机部的牵引,使得铰接l型座调整翻转角度。
22.一种机场清障处理架构,包括权利要求1所述的系统;在机场设置有用于机场跑道异物扫描及清除系统;在机场固定或可移动设置有激光雷达装置;
23.用于机场跑道异物扫描及清除系统包括异物扫描装置、三维立体数据库、跑道侵入异物数据库、数据库数据分析系统、工作站服务器处理系统、远程视频监控装置、报警及消警装置、后勤处理及跑道清除装置;
24.异物扫描装置包括激光雷达装置,激光雷达装置包括激光雷达扫描设备、云台摄
像机跟踪设备、量子图像处理系统、数据处理系统及终端显示设备;其中,激光雷达扫描设备输出接口与量子图像处理系统的输入接口并行连接,以进行形态数据传输;
25.激光雷达装置的获取异物信息;后勤处理及跑道清除装置包括异物处理装置,异物处理装置具有用于存储异物的垃圾池;
26.通过人工或机械手将垃圾池中的垃圾倾倒在距离最近的垃圾箱体中。
27.作为上述技术方案的进一步改进:
28.激光雷达装置具有配件,配件作为云台摄像机的云台配件;云台配件包括连接座台、中间过渡台及夹持台部;
29.中间过渡台分别与连接座台及夹持台部磁吸式拆装连接。
30.一种机场清障处理流程,流程执行以下步骤;
31.流程一,执行后勤处理及跑道清除方法;
32.流程二,将异物从垃圾池放置到垃圾箱体中;
33.流程三,执行权利要求3的机场清障处理方法。
34.作为上述技术方案的进一步改进:
35.在流程一中;
36.s1,三维立体数据库预存已知的跑道物体的三维成像数据并实时更新跑道物体的三维成像数据,并通过输入本地的外围设备的数据接入到数据库分析系统;跑道侵入异物数据库,输入跑道异物的数据接入到数据库分析系统;
37.s2,工作站服务器采集数据库分析系统的预存数据,异物扫描装置,实时扫描异物并与预存信息比较,进行识别;
38.s3,如果认为是异物,报警及消警装置报警,工作站服务器上传异物坐标,远程视频监控装置进行远程监控,观察异物的影像;
39.s4,后勤处理及跑道清除装置,对异物进行清除。
40.在步骤s1中,首先,激光雷达扫描设备,将待扫描物体的位置坐标及状态数据发送给数据处理系统;然后,激光雷达扫描设备全天候对机场跑道进行扫描,从而获取机场跑道异物的位置坐标、状态及形态信息,通过数据处理系统将异物位置坐标及状态数据发送给数据处理系统进行处理,将形态数据发送给量子图像处理系统进行图像处理;其次,云台摄像机跟踪设备,将从数据处理系统接收到的信息确定异物位置及状态变焦处理,对异物进行抓拍或对移动物体视频跟踪,并同步数据给数据处理系统;再次,量子图像处理系统,将从激光雷达扫描设备扫描到的形态数据进行分割去躁锐化处理,生成实体轮廓以满足fod的数据确认;之后,数据处理系统,将从激光雷达扫描设备扫描到的坐标位置及状态数据进行处理对照机场跑道建立的坐标系确定fod的实际位置以及运动轨迹信息发送到云台摄像机跟踪设备对异物抓拍或视频跟踪,并同时将次数据及从量子图像处理系统发来的图像数据一并发送到终端显示设备,提供给地勤人员;随后,终端显示设备显示数据处理系统的音视频和图像内容。
41.其中,激光雷达装置的摄像头或雷达安装工艺,如下;
42.首先,将安装在固定或行走部上,将中间过渡台与底部第二台;然后,将摄像机放置到固定立爪与横移立爪之间,调整活动夹持臂位置,摄像机靠在侧
工艺块上,通过棘轮棘爪旋转侧单向旋转偏心头和/或顶单向旋转偏心头侧顶摄像机并通过螺栓或顶丝固定;其次,将夹持底座与壳体上端面调整好位置后,旋转旋转齿轮轴,调整中心椭圆柱磁极角度位置,使得铁质的夹持底座进入中心椭圆柱磁感线中,当拆装时,调整中心椭圆柱磁极角度位置,使得铁质的夹持底座脱离中心椭圆柱磁感线;
43.通过电机驱动的旋转台,带动摄像机做立体锥面运动,通过底部第一台旋转,实现摄像机水平面调整。
44.本发明提出了基于双密度双树复小波变换量子图像去噪算法,该算法将小波理论和量子叠加态思想进行结合,改进双密度双树复小波变换,提出量子去噪因子,进行去噪算法研究,具有抗混叠、多分辨率、处理效果和边缘信息保存良好等优点和特性。很好的解决了机场跑道fod雷达检测成像后图像处理的问题。本发明设计合理、成本低廉、结实耐用、安全可靠、操作简单、省时省力、节约资金、结构紧凑且使用方便。同时,本发明还提供了云台配件可以实现常规机场摄像机的使用。
附图说明
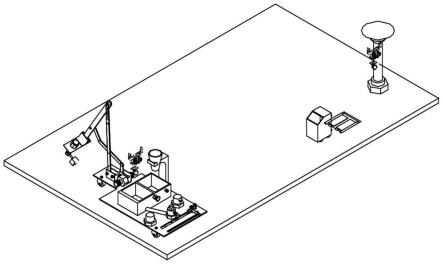
45.图1是本发明的简易使用结构示意图。
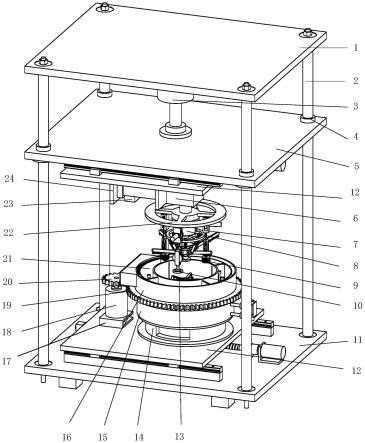
46.图2是本发明的垃圾处理结构示意图。
47.图3为机场跑道异物(fod)扫描及清除系统的数据流程处理图
48.图4为fod坐标定位数据处理系统。
49.图5是本发明的清除结构示意图。
50.图6是机场跑道雷达检测与量子图像处理相融合的数据处理流程示意图。
51.图7是量子图像处理系统计算方法算法图。
52.图8是量子图像处理前后比照图。
53.图9是本发明的底部爆炸结构示意图。
54.图10是本发明的夹持部分使用结构示意图。
55.图11是本发明的吸合结构示意图。
56.其中:1、跑道;2、飞机;3、异物;4、雷达;5、异物处理装置;6、行走架体;7、清扫部;8、混合部;9、存液池;10、横向导程槽;11、喷嘴部;12、文丘里管;13、多普勒传感器;14、垃圾池;15、导向漏斗;16、第一摆动杆;17、俯仰杆;18、连接杆;19、微动推杆;20、夹持机械手;21、偏心杆部。40、连接座台;41、中间过渡台;42、夹持台部;43、底部第一台;44、旋转台;45、底部第二台;46、夹持底座;47、定位块;48、固定夹持臂;49、活动夹持臂;50、固定立爪;51、侧工艺块;52、侧单向旋转偏心头;53、顶单向旋转偏心头;54、横移立爪;55、第一壳体;56、第二壳体;57、内腔部;58、工艺卡口;59、轴向定位止口;60、磁化半块;61、t型卡接槽;62、王字型隔离块;63、中间隔离板;64、中心椭圆柱;65、卡位台阶;66、法兰盘;67、角度限位部;68、旋转齿轮轴;69、驱动齿轮轴;连接座台40,中间过渡台41,夹持台部42,底部第一台43,旋转台44,底部第二台45,夹持底座46,定位块47,固定夹持臂48,活动夹持臂49,固定立爪50,侧工艺块51,侧单向旋转偏
心头52,顶单向旋转偏心头53,横移立爪54,第一壳体55,第二壳体56,内腔部57,工艺卡口58,轴向定位止口59,磁化半块60,t型卡接槽61,王字型隔离块62,中间隔离板63,中心椭圆柱64,卡位台阶65,法兰盘66,角度限位部67,旋转齿轮轴68,驱动齿轮轴69。
57.70、塔台;71、传动带组;72、下落开口;73、铰接对开门;74、工艺底座;75、垃圾箱体;76、正向上面开口;77、底部滚轮;78、侧部滚轮;79、条带间隙;80、底部支撑座;81、铰接l型座;82、配重座部;83、下升降座;84、二级升降座;85、二级支撑架;86、前卷扬机部;87、后卷扬机部。
58.具体实施方式
59.如图1所示,本实施例的基于激光雷达的机场清障处理系统,其应用环境为机场,在机场上设置有塔台70、登机桥;
60.系统包括在机场上设置有下落开口72,在机场设定区域地下设置有地下通道;在地下通道中设置有用于传送垃圾箱体75的传动带组71;
61.在传动带组71具有条带间隙79,在下落开口72下方设置有下落工位;
62.传动带组71通过下落工位;在下落开口72处设置有铰接对开门73;铰接对开门73卡合间隙方向与传动带组71传送方向相同;
63.在下落工位,设置有位于传动带组71上行段下方设置有底部支撑座80,在底部支撑座80上设置有下升降座83,在下升降座83上设置有二级升降座84;在二级升降座84上铰接有铰接l型座81的支点;
64.在铰接l型座81立板背面上部设置有配重座部82及后卷扬机部87;在二级升降座84上设置有位于配重座部82下方的二级支撑架85,在二级支撑架85上设置有后部挂环,用于与后卷扬机部87通过绳索连接;
65.在铰接l型座81横板下部设置有前卷扬机部86,在下升降座83上设置有前部挂环,用于与前卷扬机部86通过绳索连接;
66.下落开口72用于通过水平放置的垃圾箱体75。
67.在下落开口72上方一侧工艺底座74。
68.垃圾箱体75底部具有底部滚轮77且背面具有侧部滚轮78;在垃圾箱体75正面斜上方设置有正向上面开口76。
69.本实施例的基于激光雷达的机场清障处理方法,执行以下步骤;当盛有垃圾的垃圾箱体75需要回收时,首先,将下落开口72打开,下升降座83上升,使得铰接l型座81到达下落开口72;然后,通过机械手或人工将垃圾箱体75送到铰接l型座81上;其次,铰接l型座81下降,使得垃圾箱体75落在传动带组71上并输到集中回收;
70.当空载的垃圾箱体75需要放置时,首先,平躺的垃圾箱体75通过传动带组71送到下落工位;然后,铰接l型座81上升将平躺的垃圾箱体75向上通过打开后的下落开口72;其次,二级升降座84继续上升,使得铰接
l型座81的横板从竖直状态变成水平状态并斜向下状态,垃圾箱体75变为竖立后并自动离开l型座81的横板;
71.其中,通过配重座部82的重力,在前卷扬机部86及后卷扬机部87的牵引,使得铰接l型座81调整翻转角度。
72.本实施例的机场清障处理架构,包括权利要求1的系统;在机场设置有用于机场跑道异物扫描及清除系统;在机场固定或可移动设置有激光雷达装置;
73.用于机场跑道异物扫描及清除系统包括异物扫描装置、三维立体数据库、跑道侵入异物数据库、数据库数据分析系统、工作站服务器处理系统、远程视频监控装置、报警及消警装置、后勤处理及跑道清除装置;
74.异物扫描装置包括激光雷达装置,激光雷达装置包括激光雷达扫描设备、云台摄像机跟踪设备、量子图像处理系统、数据处理系统及终端显示设备;其中,激光雷达扫描设备输出接口与量子图像处理系统的输入接口并行连接,以进行形态数据传输;
75.激光雷达装置的获取异物信息;后勤处理及跑道清除装置包括异物处理装置,异物处理装置具有用于存储异物的垃圾池;
76.通过人工或机械手将垃圾池中的垃圾倾倒在距离最近的垃圾箱体75中。
77.激光雷达装置具有配件,配件作为云台摄像机的云台配件;云台配件包括连接座台40、中间过渡台41及夹持台部42;
78.中间过渡台41分别与连接座台40及夹持台部42磁吸式拆装连接。
79.本实施例的机场清障处理流程,流程执行以下步骤;
80.流程一,执行后勤处理及跑道清除方法;
81.流程二,将异物从垃圾池放置到垃圾箱体75中;
82.流程三,执行权利要求3的机场清障处理方法。
83.在流程一中;
84.s1,三维立体数据库预存已知的跑道物体的三维成像数据并实时更新跑道物体的三维成像数据,并通过输入本地的外围设备的数据接入到数据库分析系统;跑道侵入异物数据库,输入跑道异物3的数据接入到数据库分析系统;
85.s2,工作站服务器采集数据库分析系统的预存数据,异物扫描装置,实时扫描异物3并与预存信息比较,进行识别;
86.s3,如果认为是异物3,报警及消警装置报警,工作站服务器上传异物3坐标,远程视频监控装置进行远程监控,观察异物3的影像;
87.s4,后勤处理及跑道清除装置,对异物3进行清除。
88.在步骤s1中,首先,激光雷达扫描设备,将待扫描物体的位置坐标及状态数据发送给数据处理系统;然后,激光雷达扫描设备全天候对机场跑道进行扫描,从而获取机场跑道异物的位置坐标、状态及形态信息,通过数据处理系统将异物位置坐标及状态数据发送给数据处理系统进行处理,将形态数据发送给量子图像处理系统进行图像处理;其次,云台摄像机跟踪设备,将从数据处理系统接收到的信息确定异物位置及状态变焦处理,对异物进行抓拍或对移动物体视频跟踪,并同步数据给数据处理系
统;再次,量子图像处理系统,将从激光雷达扫描设备扫描到的形态数据进行分割去躁锐化处理,生成实体轮廓以满足fod的数据确认;之后,数据处理系统,将从激光雷达扫描设备扫描到的坐标位置及状态数据进行处理对照机场跑道建立的坐标系确定fod的实际位置以及运动轨迹信息发送到云台摄像机跟踪设备对异物抓拍或视频跟踪,并同时将次数据及从量子图像处理系统发来的图像数据一并发送到终端显示设备,提供给地勤人员;随后,终端显示设备显示数据处理系统的音视频和图像内容。
89.其中,激光雷达装置的摄像头或雷达安装工艺,如下;
90.首先,将安装在固定或行走部上,将中间过渡台41与底部第二台45;然后,将摄像机放置到固定立爪50与横移立爪54之间,调整活动夹持臂49位置,摄像机靠在侧工艺块51上,通过棘轮棘爪旋转侧单向旋转偏心头52和/或顶单向旋转偏心头53侧顶摄像机并通过螺栓或顶丝固定;其次,将夹持底座46与壳体上端面调整好位置后,旋转旋转齿轮轴68,调整中心椭圆柱64磁极角度位置,使得铁质的夹持底座46进入中心椭圆柱64磁感线中,当拆装时,调整中心椭圆柱64磁极角度位置,使得铁质的夹持底座46脱离中心椭圆柱64磁感线;
91.通过电机驱动的旋转台44,带动摄像机做立体锥面运动,通过底部第一台43旋转,实现摄像机水平面调整。
92.如图1-11,本发明基于现有机场塔台70,通过利用非跑道区域的地下空间,作为传动带组71的传送空间,实现垃圾箱体的输出,相比于传统人工车拉,效率高,减少人工,避免了人与人之间的接触,人与垃圾的接触,通过下落开口72,铰接对开门73实现垃圾箱的上下升降,门可以自动和/或人工,优选自动,工艺底座74为优选,方便垃圾箱的倾倒变化方向,当空载垃圾箱送回的时候,其上升高度高于工艺底座74而避免挡碍,传送空间其可以作为水道排水,垃圾箱体75通过机械手搬运调整,第三方提供,正向上面开口76方便垃圾箱在传送空间的水平放置,而垃圾不会掉落,底部滚轮77,侧部滚轮78实现垃圾箱水平状态与竖立状态的移动,通过条带间隙79实现铰接l型座81穿过,配重座部82实现辅助复位,下升降座83,二级升降座84实现了升降与角度倾向,二级支撑架85安装吊环,前卷扬机部86,后卷扬机部87,实现牵拉调整垃圾箱的角度,使得垃圾箱变为水平或竖立状态或下倾斜状态。
93.如图3-5,本发明的基本思路为机场跑道异物检测及清除的一整套系统包括:异物扫描装置、三维立体数据库、跑道侵入异物数据库、数据库数据分析系统、工作站服务器处理系统、远程视频监控装置、报警及消警装置、后勤处理及跑道清除装置。
94.其中,异物扫描装置安装在跑道两侧边灯位置并根据民航局规定高度安装。异物扫描装置主要为激光雷达设备及数据传输设备,激光雷达水平角度一般在15
°
左右,仰角8
°
,在边灯两侧交替间隔100安装。远程视屏监控设备可采取边灯式安装也可采取灯塔式安装,根据机场跑道实际情况选定安装方式。
95.三维立体数据库采用人工输入及确定的方法输入机场内机场基础设施、跑道基础运营设备、飞机型号物理属性和其他环境,当雷达扫描到这些设备时把数据处理后推送给地勤人员做相应的反应。跑道侵入异物数据库是指常见异物物理属性及后发现异物物理属性等数据,用来确定和区分跑道内物体的危险等级。数据库数据分析系统是用来处理雷达扫描数据通过对接入的数据进行处理从而得到跑道上物体的属性、状态、坐标等信息。工作
站服务器处理系统来处理数据库分析系统数据如非外来物体或是跑道异物的威胁程度等级信息,从而推送至远程视频监控装置、报警及消警装置、后勤处理及跑道清除装置处理。所述的报警及消警装置用来显示报警的威胁等级、坐标位置、清除对象及清除确认信息。后勤处理及跑道清除装置用来处理报警的信息,清除跑道上存在威胁的物体,以及可能需要人为现场判断的跑道异物威胁事件的处理。本发明是整体架构保护,基于激光雷达扫描异物,减少了人员与可能携带病毒物体的接触,节约时间等效果。
96.如图3-5所示,本实施例的后勤处理及跑道清除装置,用于清除跑道上存在威胁;后勤处理及跑道清除装置包括异物处理装置5,在异物处理装置5上设置有无人驾驶或人工驾驶驱动的行走架体6,作为平台,在行走架体6上设置有带有负压的清扫部7,用于清扫跑道1上的异物3;
97.在行走架体6上设置有存液池9及垃圾池14,在行走架体6上设置有横向导程槽10及平行的横向工艺槽,在横向导程槽10中横向移动有横向滑块,在横向滑块上升降设置有喷嘴部11,用于下探出横向工艺槽并对地面异物3喷射,喷嘴部11在清扫部7前方、侧部或后方;
98.在行走架体6上设置有通过管路与存液池9连通的混合部8,在混合部8上设置有文丘里管12一进口,文丘里管12出口通过管路连接喷嘴部11;文丘里管12另一进口连接洗涤液。
99.在垃圾池14上方设置有导向漏斗15,在导向漏斗15一侧设置有清除机械手;清除机械手包括铰接在行走架体6上的第一摆动杆16及连接杆18,在第一摆动杆16端部铰接有俯仰杆17的根部,在连接杆18的端部铰接俯仰杆17的中部;
100.在俯仰杆17的头部设置有安装座,在安装座上设置有微动推杆19,在微动推杆19端部设置有偏心杆部21的一端,在偏心杆部21的另一端设置有夹持机械手20或负压吸盘,用于拾取设定大小的异物3;
101.俯仰杆17的上扬工位位于导向漏斗15上方,用于下落异物3于垃圾池14中。
102.在行走架体6上设置有多普勒传感器13和/或雷达4;
103.多普勒传感器13和/或雷达4,用于感知异物3的大小及位置。
104.本实施例的后勤处理及跑道清除方法,方法包括以下步骤;
105.s1,三维立体数据库预存已知的跑道物体的三维成像数据并实时更新跑道物体的三维成像数据,并通过输入本地的外围设备的数据接入到数据库分析系统;跑道侵入异物数据库,输入跑道异物3的数据接入到数据库分析系统;
106.s2,工作站服务器采集数据库分析系统的预存数据,异物扫描装置,实时扫描异物3并与预存信息比较,进行识别;
107.s3,如果认为是异物3,报警及消警装置报警,工作站服务器上传异物3坐标,远程视频监控装置进行远程监控,观察异物3的影像;
108.s4,后勤处理及跑道清除装置,对异物3进行清除。
109.在s4中,执行清除步骤;
110.s4.1,首先,根据异物3的信息,选择对应的夹持机械手20或负压吸盘;然后,行走架体6,行走到异物3处;其次,第一摆动杆16及连接杆18摆动,使得俯仰杆17下落;再次,微动推杆19操控偏心杆部21,使得夹持机械手20或负压吸盘拾取设定大小的异物3;
111.s4.2,俯仰杆17抬起到上扬工位,来到导向漏斗15上方,使得异物3下落于垃圾池14中;
112.s4.3,首先,通过推杆驱动横向滑块移动,喷嘴部11到达异物离开处;然后,启动泵站,混合部8抽取存液池9的液体,液体通过文丘里管12混合洗涤液,从喷嘴部11喷出到异物离开处,进行冲洗;
113.s4.4,启动负压的清扫部7,清扫跑道1。
114.作为可以单独或组合使用,异物处理装置5实现自动化移动,实现对异物的拾取,行走架体6,为示意图,可以根据机场的等级及当地特点进行适应性改造,清扫部7为现有技术,作为改进,混合部8实现了液体与洗涤液的混合,存液池9可以为清水,横向导程槽10实现横向移动,配合纵向行走,实现了固定支撑,避免了车辆必须横向移动,喷嘴部11进行高压喷射清理,文丘里管12实现了自动清水与对应的洗涤液配合,避免池体中的清水被污染,多普勒传感器13或雷达实现了扫描与测距,垃圾池14实现了异物的下落,导向漏斗15实现了导向,本发明通过第一摆动杆16,俯仰杆17,连接杆18实现了夹持机械手20的俯仰,微动推杆19实现了微调,偏心杆部21实现了避免挡碍。本发明实现了自动异物拾取或清理,多功能,效率高。
115.实施例1,如图4-11所示,本发明是一种基于量子图像处理技术与激光雷达相融合的fod异物检测图像处理系统,包括激光雷达扫描设备、云台摄像机跟踪设备、量子图像处理系统、数据处理系统及终端显示设备;
116.其中,激光雷达扫描设备输出接口与量子图像处理系统的输入接口并行连接,以进行形态数据传输;量子图像处理系统的输出接口与数据处理系统的输入接口并行连接,以将图像信息进行处理识别;数据处理系统的输出接口与终端显示设备及云台摄像机跟踪设备的输入接口并行连接,控制终端显示设备及云台摄像机跟踪设备的动作;云台摄像机跟踪设备的输出接口与数据处理系统的输入接口并行连接,以实现动作信息的反馈;
117.激光雷达扫描设备,将待扫描物体的位置坐标及状态数据发送给数据处理系统。
118.激光雷达扫描设备安装在机场跑道边灯位置处或可移动安装,其最大高度不高于350mm并且使用防护罩或其他方法,以防止雨雪堆积在镜片表面,24小时全天候不间断的对机场跑道进行扫描从而获取机场跑道异物的位置坐标、状态及形态信息,通过数据处理系统将异物位置坐标及状态数据发送给数据处理系统进行处理,将形态数据发送给量子图像处理系统进行图像处理。
119.云台摄像机跟踪设备将从数据处理系统接收到的信息确定异物位置及状态变焦后使图像占据画面的五分之一左右,对异物进行精确抓拍或对移动物体视频跟踪,然后同步数据给数据处理系统。
120.量子图像处理系统将从激光雷达扫描设备扫描到的形态数据主要为点云图进行分割去躁锐化等技术处理,生成较为清晰的实体轮廓以满足fod相关数据确认。量子图像处理系统将从激光雷达扫描设备扫描到的形态数据进行处理生成图像发
送到数据处理系统。
121.数据处理系统将从激光雷达扫描设备扫描到的坐标位置及状态数据进行处理对照机场跑道建立的坐标系确定fod的实际位置以及运动轨迹等信息发送到云台摄像机跟踪设备对异物抓拍或视频跟踪,并同时将次数据及从量子图像处理系统发来的图像数据一并发送到终端显示设备,提供给地勤人员。
122.终端显示设备用来显示数据处理系统的音视频和图像内容。
123.作为一实施例,如图2所示量子图像处理系统将从激光雷达扫描设备扫描到的点云图进行量子算法处理,清晰的得到异物的物理属性图像。
124.作为一实施例,如图3所示机场跑道异物前后处理的对照图。
125.作为一实施例,如图1-6所示,本实施例的应用于机场的激光雷达装置,包括激光雷达扫描设备、云台摄像机跟踪设备、量子图像处理系统、数据处理系统及终端显示设备;其中,激光雷达扫描设备输出接口与量子图像处理系统的输入接口并行连接,以进行形态数据传输;
126.量子图像处理系统的输出接口与数据处理系统的输入接口并行连接,以将图像信息进行处理识别,量子图像处理系统将从激光雷达扫描设备扫描到的形态数据进行处理生成图像发送到数据处理系统;数据处理系统的输出接口与终端显示设备及云台摄像机跟踪设备的输入接口并行连接,控制终端显示设备及云台摄像机跟踪设备的动作;云台摄像机跟踪设备的输出接口与数据处理系统的输入接口并行连接,以实现动作信息的反馈。
127.激光雷达扫描设备,将待扫描物体的位置坐标及状态数据发送给数据处理系统;激光雷达扫描设备安装在机场跑道边灯位置处或可移动安装,配套有防护罩,以防止雨雪堆积在镜片表面,全天候对机场跑道进行扫描,从而获取机场跑道异物的位置坐标、状态及形态信息,通过数据处理系统将异物位置坐标及状态数据发送给数据处理系统进行处理,将形态数据发送给量子图像处理系统进行图像处理。
128.云台摄像机跟踪设备,将从数据处理系统接收到的信息确定异物位置及状态变焦处理,对异物进行抓拍或对移动物体视频跟踪,并同步数据给数据处理系统。
129.量子图像处理系统,将从激光雷达扫描设备扫描到的形态数据进行分割去躁锐化处理,生成实体轮廓以满足fod的数据确认;
130.形态数据包括点云图。
131.数据处理系统,将从激光雷达扫描设备扫描到的坐标位置及状态数据进行处理对照机场跑道建立的坐标系确定fod的实际位置以及运动轨迹信息发送到云台摄像机跟踪设备对异物抓拍或视频跟踪,并同时将次数据及从量子图像处理系统发来的图像数据一并发送到终端显示设备,提供给地勤人员;
132.终端显示设备,用来显示数据处理系统的音视频和图像内容;
133.量子图像处理系统将从激光雷达扫描设备扫描到的点云图进行量子算法处理,得到异物的物理属性图像;
134.云台摄像机设置有云台配件。
135.作为一实施例,本实施例的应用于机场的激光雷达控制工艺,借助于激光雷达扫描设备、云台摄像机跟踪设备、量子图像处理系统、数据处理系统及终端显示设备;工艺包括以下步骤;首先,激光雷达扫描设备,将待扫描物体的位置坐标及状态数据发送给数据处
理系统;然后,激光雷达扫描设备全天候对机场跑道进行扫描,从而获取机场跑道异物的位置坐标、状态及形态信息,通过数据处理系统将异物位置坐标及状态数据发送给数据处理系统进行处理,将形态数据发送给量子图像处理系统进行图像处理;其次,云台摄像机跟踪设备,将从数据处理系统接收到的信息确定异物位置及状态变焦处理,对异物进行抓拍或对移动物体视频跟踪,并同步数据给数据处理系统;再次,量子图像处理系统,将从激光雷达扫描设备扫描到的形态数据进行分割去躁锐化处理,生成实体轮廓以满足fod的数据确认;之后,数据处理系统,将从激光雷达扫描设备扫描到的坐标位置及状态数据进行处理对照机场跑道建立的坐标系确定fod的实际位置以及运动轨迹信息发送到云台摄像机跟踪设备对异物抓拍或视频跟踪,并同时将次数据及从量子图像处理系统发来的图像数据一并发送到终端显示设备,提供给地勤人员;随后,终端显示设备显示数据处理系统的音视频和图像内容。
136.作为一实施例,本实施例的应用于机场的激光雷达装置的配件,配件作为云台摄像机的云台配件;云台配件包括连接座台40、中间过渡台41及夹持台部42;
137.中间过渡台41分别与连接座台40及夹持台部42磁吸式拆装连接。
138.连接座台40包括底部用于螺纹连接的底部第一台43;在底部第一台43上斜面斜交旋转有旋转台44的下表面,在旋转台44的上表面有底部第二台45;
139.夹持台部42包括与中间过渡台41电磁吸合的夹持底座46;
140.在夹持底座46下部设置有定位块47;
141.在夹持底座46上设置有固定夹持臂48,在固定夹持臂48上移动夹持活动夹持臂49与固定夹持臂48用于夹持摄像机;
142.在固定夹持臂48上垂直设置有固定立爪50,在活动夹持臂49对应垂直设置有与固定立爪50结构相同的横移立爪54;
143.在固定立爪50及横移立爪54上分别设置有侧工艺块51、侧单向旋转偏心头52和/或顶单向旋转偏心头53。
144.中间过渡台41包括通过螺栓连接的对合的第一壳体55及第二壳体56;第一壳体55及第二壳体56抱合形成具有内腔部57的壳体部,在壳体部上下两侧设置有工艺卡口58,定位块47用于卡接在工艺卡口58上,在壳体部中横向设置有与内腔部57连通的贯穿孔,在贯穿孔端部设置有轴向定位止口59,在内腔部57中对合有两个磁化半块60;在两个磁化半块60对合形成与贯穿孔同轴的中心孔;在磁化半块60上对称设置有与中心孔平行且位于中心孔两侧的t型卡接槽61,在两对应的t型卡接槽61中设置有王字型隔离块62,王字型隔离块62的中部隔板为中间隔离板63,以将两个磁化半块60物理割开;
145.在中心孔旋转有贯穿中心椭圆柱64中心的中心主轴;在中心主轴上,在中心椭圆柱64两轴向端设置有位于轴向定位止口59中的卡位台阶65,在卡位台阶65外侧设置有套装中心主轴上的法兰盘66,法兰盘66与壳体部连接;
146.在中心主轴两端分别设置有角度限位部67及旋转齿轮轴68,在壳体部上设置有与旋转齿轮轴68啮合的驱动齿轮轴69;
147.中心椭圆柱64两长轴端设置有互斥的磁极;
148.壳体上下端面分别用于磁吸连接夹持底座46及连接座台40、壳体上端面磁吸连接夹持底座46且下端面螺纹连接连接座台40或壳体上端面螺纹连接夹持底座46且下端面磁吸连接连接座台40。
149.本实施例的应用于机场的激光雷达装置的摄像头安装工艺,借助于云台配件;
150.首先,将安装在固定或行走部上,将中间过渡台41与底部第二台45;然后,将摄像机放置到固定立爪50与横移立爪54之间,调整活动夹持臂49位置,摄像机靠在侧工艺块51上,通过棘轮棘爪旋转侧单向旋转偏心头52和/或顶单向旋转偏心头53侧顶摄像机并通过螺栓或顶丝固定;其次,将夹持底座46与壳体上端面调整好位置后,旋转旋转齿轮轴68,调整中心椭圆柱64磁极角度位置,使得铁质的夹持底座46进入中心椭圆柱64磁感线中,当拆装时,调整中心椭圆柱64磁极角度位置,使得铁质的夹持底座46脱离中心椭圆柱64磁感线;
151.通过电机驱动的旋转台44,带动摄像机做立体锥面运动,通过底部第一台43旋转,实现摄像机水平面调整。作为本发明的另一个本发明点,是对应雷达云台的改进。
152.本发明通过连接座台40实现连接于行车、固定架,优选行车,中间过渡台41其采用电磁实现了固定定位,快速拆装,夹持台部42为一种扩展,也可以是其他结构,以配套,只要底面具有铁板即可,底部第一台43实现固定,其可以是旋转驱动,实现了360度调整,旋转台44其采用斜交,实现锥面立体调整,相比于传统结构,其可以具有更大的视角,避免挡碍,更加灵活,底部第二台45,优选螺栓固定,或磁力吸附均可,夹持底座46,定位块47实现定位支撑为可选方案,固定夹持臂48,活动夹持臂49实现夹持摄像头,固定立爪50,侧工艺块51实现定位,侧单向旋转偏心头52,顶单向旋转偏心头53实现纵坐标与横坐标定位,横移立爪54实现侧部夹持,第一壳体55,第二壳体56优选为铸铁等,内腔部57实现容纳,采用对合结构,方便拆装,工艺卡口58工艺合理,轴向定位止口59实现轴向限位与旋转支撑,磁化半块60,优选软铁结构,实现磁性强化,t型卡接槽61通过王字型隔离块62实现连接,中间隔离板63避免磁化半块接触,可以采用铜,中心椭圆柱64可旋转,实现磁感线的变化,从而利用壳体与半块的强化实现磁吸或松开,卡位台阶65实现限位,法兰盘66实现限位与支撑,角度限位部67实现角度标识,旋转齿轮轴68,驱动齿轮轴69实现啮合驱动,为优选方案。
153.本发明充分描述是为了更加清楚的公开,而对于现有技术就不再一一列举。
154.最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;作为本领域技术人员对本发明的多个技术方案进行组合是显而易见的。而这些修改或者替换,并不使相应技术方案的本质脱离本发明实施例技术方案的精神和范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。