1.本发明涉及核电领域,更具体地说,涉及一种核电站主设备安装三维控制网建立方法。
背景技术:
2.目前最高精度的徕卡ts60全站仪,其标称精度测距是0.6mm 1
×
10-6
d,测角0.5
″
,在20m范围内,整个系统的精度可达到0.3mm。随着核电技术的发展,设备的安装提出了更高精度的定位要求,全站仪的精度提高已经达到了瓶颈,最高精度的全站仪也仅能勉强满足主设备安装定位的需求。
3.另外,传统的控制网布设方式是分别使用全站仪和水准仪在地面布设平面和高程控制点,不仅耗费过多的人力物力,而且现场的点位之间通视条件容易受到影响,造成该区域实际可用的控制点变少,甚至出现因控制点不足影响现场测量放样作业,不得不重新布设控制点。
4.采用全站仪和水准仪分别布设平面控制点和高程控制点,以核岛厂房筏基的微网点为基准,首先在三个环路分别建立平面和高程基准点,再以这些点为基准完成主设备测量控制网的建立。平面控制点按照方向观测法测边角,高程控制点按照二等水准的测量方法,外业观测结束后采用平差软件进行平差计算。
5.此技术工作量大,工作效率低,由于全站仪精度的限制,观测时照准误差、对中误差等对结果存在影响,平面控制点的精确无法突破0.3mm。另外平面控制点间的通视极易受现场施工活动的影响,导致某些控制点被遮挡而不可用。
6.激光跟踪仪是实现三维控制网测量的理想工具,其测据精度可以达到几个μm,虽然测角精度弱于全站仪,但可以通过自由设站组成测边控制网,采用专用软件平差进行数据解算,得到超高精度的测量控制网。
7.现有的技术可建立精度高的测量控制网,但是由于控制点埋设在地上,容易受现场测量环境变化的影响,导致测量作业存在困难,可利用的控制点随着工程进展越来越少,影响了测量控制点坐标的传递,甚至影响到了现场测量放样工作正常开展。
技术实现要素:
8.本发明要解决的技术问题在于,针对现有技术的上述缺陷,提供一种核电站主设备安装三维控制网建立方法。
9.本发明解决其技术问题所采用的技术方案是:构造一种核电站主设备安装三维控制网建立方法,包括以下步骤:
10.s1、在待测空间的表面至少选取三个微网点,以选取的所述微网点为基准点建立三维控制网,所述三维控制网包括分布在三维空间的若干控制点;
11.s2、控制点上设置第一底座,在所述基准点设置第二底座,所述第一底座上设有供靶球放置的第一安装位,所述第二底座上设有供靶球放置的第二安装位;
12.s3、使用观测仪对各所述基准点、控制点的靶球进行观测,并对观测数据进行处理,以获得各所述基准点、控制点的三维坐标。
13.优选地,所述步骤s1中,所述基准点分布在地面上,所述控制点分布在地面、墙面、天花板上。
14.优选地,所述步骤s3中,所述观测仪通过多次自由设站完成对所有控制点的观测,所述观测仪在各站点观测的网形呈环形,且每个控制点至少有两个以上观测数据,相邻两站点间至少观测四个相同的控制点,所述观测仪的各站点形成闭合。
15.优选地,所述步骤s3中,选取厂房微网中的已知点为基准点,对激光跟踪仪的观测数据用软件进行平差解算和坐标系转换,得到三维控制网各控制点的坐标。
16.优选地,所述底座包括磁性靶座,所述第一安装位为在所述磁性靶座设置的第一安装孔。
17.优选地,所述第二底座包括基座、以及转动安装在所述基座上的支撑座,所述基座设有对中孔,所需基座通过对中孔对准地面的微网点,所述第二安装位为在所述支撑座顶端设置的第二安装孔。
18.优选地,所述第一安装位、第二安装位呈沉孔状,以供所述靶球放入。
19.优选地,所述第一安装位、第二安装位为内凹的锅形结构。
20.优选地,所述观测仪为激光跟踪仪。
21.实施本发明的核电站主设备安装三维控制网建立方法,具有以下有益效果:本发明可以解决现有的核岛厂房测量控制点易受通视条件影响,增加可利用的控制点,不影响测量控制点坐标的传递,不会影响现场测量放样的工作开展。使用同一种仪器即可完成包括平面和高程信息的三维控制网,提高作业效率。另外该控制网建立方法建立绝对位置和相对位置精度都很高的控制点,满足主设备安装定位相对精度和绝对精度都很高的要求。
附图说明
22.下面将结合附图及实施例对本发明作进一步说明,附图中:
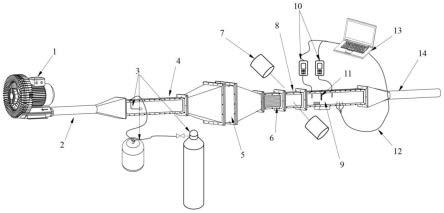
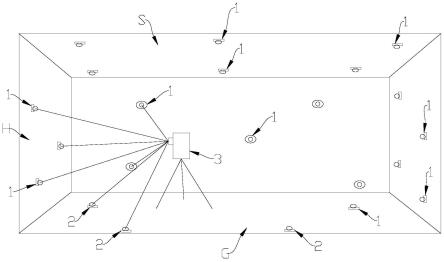
23.图1是本发明实施例中的核电站主设备安装三维控制网建立方法测试时的布局示意图;
24.图2是图1中的第一底座的磁性靶座和靶球组合时的剖面示意图;
25.图3是图1中的第二底座的基座和支撑座采用转动连接方式组合时的剖面示意图。
具体实施方式
26.为了对本发明的技术特征、目的和效果有更加清楚的理解,现对照附图详细说明本发明的具体实施方式。
27.结合图1所示,本发明一个优选实施例中的核电站主设备安装三维控制网建立方法包括以下步骤:
28.s1、在待测空间的表面至少选取三个微网点作为三维控制网的基准点,以选取的所述微网点为基准建立三维控制网,所述三维控制网包括分布在三维空间的若干控制点;通常,微网点为空间内地面g上的点。
29.s2、在所述控制点上设置第一底座1,所述基准点上设置第二底座2,所述第一底座
1上设有供靶球放置的第一安装位a1,所述第二底座2上设有供靶球放置的第二安装位a2。
30.s3、使用观测仪3对各所述基准点、控制点的靶球进行观测,并对观测数据进行处理,以获得各所述基准点、控制点的三维坐标。优选地,观测仪3为激光跟踪仪。
31.本发明可以解决现有的核岛厂房测量控制点易受通视条件影响,增加可利用的控制点,不影响测量控制点坐标的传递,不会影响现场测量放样的工作开展。使用同一种仪器即可完成包括平面和高程信息的三维控制网,提高作业效率。另外该控制网建立方法建立绝对位置和相对位置精度都很高的控制点,满足主设备安装定位相对精度和绝对精度都很高的要求。
32.在完成厂房的微网点测量后,精度要求高的区域以微网点为基准建立加密的三维控制网,采用激光跟踪仪进行三维控制网的观测。
33.步骤s1中,所述基准点分布在地面g上,控制点分布在地面g、墙面h、天花板s上。三维控制点立体分布见图1:优选地,控制点的点位的布设按照均匀分布,长边控制短边,高低错落有致的原则,埋设在地面g、四周的墙面h及天花板s上。
34.步骤s3中,所述观测仪3通过多次自由设站完成对所有控制点的观测,所述观测仪3在各站点观测的网形呈环形,以形成三维空间的数据,且每个控制点至少有两个以上的观测数据,相邻两站点间至少观测四个相同的控制点,并且首站和尾站形成“闭合”。
35.步骤s3中,选取厂房微网中的已知点为基准点,对激光跟踪仪的观测数据进行平差解算和坐标系转换,得到三维控制网各控制点的坐标。
36.如图2所示,在一些实施例中,第一底座1包括磁性靶座11,所述第一安装位a1为在所述磁性靶座11设置的第一安装孔111,第一安装位a1呈沉孔状,以供所述靶球放入。优选地,第一安装位a1为内凹的锅形结构。第一底座1通常作为控制点埋设,埋设方式快捷便利,靶球吸附在磁性靶座11上,并可以转动不同的角度。
37.如图3所示,在一些实施例中,第二底座2包括基座23,以及转动安装在所述基座23上的支撑座24,所述基座23设有对中孔231,所需基座23通过对中孔231对准地面的微网点,第二安装位a2为在所述支撑座24顶端设置的第二安装孔241。第二安装位a2呈沉孔状,以供所述靶球放入,优选地,第二安装位a2为内凹的锅形结构。
38.基座23的对中孔231对准地面的微网点后,支撑座24通过转动安装在所述基座23上。靶球可以吸附在支撑座24的第二安装孔241,并可以转动不同的角度。
39.从已建立的微网点传递坐标至三维控制网,则采用传统的测量脚架架设在微网点上,测量脚架上安装基座23,点位的对中采用天底仪,以减小对中误差,靶球吸附在支撑座24顶端的第二安装孔241。
40.在其他一些实施例中,为了消除地面微网点作为基准点的对中误差带来的精度影响,微网观测前可在墙壁上埋设好至少三个第一底座1形式的控制点作为三维控制网的基准点,以便和微网一起观测。采用全站仪照准球形靶球进行观测,用全站仪观测球形靶球时,所需要的棱镜常数通过实验精确测量得到。同时,使用水准仪对这些墙壁上的控制点的高程进行测量,使得作为基准点拥有精确的三维坐标。
41.可以理解地,本发明通过埋设磁性靶座11作为控制点,改变传统控制点的规格形式,达到坐标高精度传递的目的,使得三维控制网的绝对位置精度和相对位置精度都较高,点位坐标中误差由10-1
mm提升到10-2
mm。
42.进一步地,本发明可以采用同一台仪器即可完成包含平面和高程信息的三维控制网,仪器自动化程度高,消除观测误差和对中误差,操作简单,作业效率高。以三个回路主设备间控制网的建立为例,工作时间可由6天减少为1天,并且控制点点数更多。
43.控制点可在地面g、墙面h、天花板s布设,可选择的位置大大增多,设站采用自由设站较为灵活,后续即使少数点被遮挡也不会导致无控制点可用。
44.本发明的技术关键点是将核岛厂房微网点的坐标高精度的传递至三维控制网,可以采用磁性靶座11作为三维控制网的控制点,并优化控制点的布置形式,利用激光跟踪仪对三维控制网进行观测的方法,使得三维控制网点同时具有高的绝对位置和相对位置精度。
45.可以理解地,上述各技术特征可以任意组合使用而不受限制。
46.以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。