1.本发明涉及车辆涉水检测技术领域,具体涉及一种基于环视影像系统的涉水检测系统及方法。
背景技术:
2.车辆在经过积水路面或者暴雨天气行车时,很容易因车辆涉水导致发动机受损从而造成重大经济损失。
3.目前,一般采用超声波探头或者借助人眼进行车辆涉水的检测和报警,会存在一些缺陷:超声波探头方案需要在车辆地盘或后视镜位置安装独立的超声波探头,并单独进行标定开发,增加成本;人眼对水深判断容易出现误判,尤其雨雾天气。
4.也就是说,目前的涉水检测方法成本高,误差大。
技术实现要素:
5.针对现有技术存在的问题,本发明的目的在于提供一种基于环视影像系统的涉水检测系统及方法,其在不增加硬件成本的基础上,增加涉水检测功能,提升车辆涉水的安全性。
6.为实现上述目的,本发明采用的技术方案是:一种基于环视影像系统的涉水检测系统,其包括视频接收模块和图像处理模块;所述视频接收模块连接车辆的环视影像系统,用于接收环视影像系统的各个摄像头捕捉的图像数据,并将其发送到图像处理模块;所述图像处理模块,用于将图像数据进行缓存和处理,处理如下:通过卷积神经网络对前后视频帧进行分类,预测对应的视频帧有无积水,当有积水且车辆行驶到积水附近时,在有积水的视频帧中计算涉水深度。
7.所述图像处理模块计算涉水深度的方法如下:对于有积水的视频帧图像,通过边缘梯度算法或深度学习算法检测出车轮与水面的接触位置;假定一个初始水位线高度,并设定初始补上以及最大迭代次数;迭代计算水位线高度,使得假定的水位线高度逐渐逼近实际水位线高度,步长绝对值小于0.5厘米或迭代次数超过最大迭代次数时,迭代计算结束,得到水位线高度即为车辆涉水深度。
8.所述图像处理模块还用于将计算出的涉水深度与预设的报警等级阈值进行比较,得到相应的涉水等级。
9.所述图像处理模块包括图像处理单元、ddr单元和flas/emmc模块,所述ddr单元用于缓存视频接收模块发送的图像数据;所述flas/emmc模块用于存储涉水深度计算的程序以及相应的配置参数。
10.所述图像处理模块连接有can收发器和视频输出模块,所述图像处理模块通过can
收发器将车辆涉水深度发送到车身;所述图像处理模块通过视频输出模块输出车辆涉水深度信息以及涉水等级。
11.一种基于环视影像系统的涉水检测方法,其包括以下步骤:步骤1、获取车辆环视影像系统捕获的车辆周围的图像数据;步骤2、对获取的图像数据处理:通过卷积神经网络对前后视频帧进行分类,预测对应的视频帧有误技术,在有积水的视频帧中计算涉水深度。
12.计算涉水深度的方法如下:对于有积水的视频帧图像,通过边缘梯度算法或深度学习算法检测出车轮与水面的接触位置;假定一个初始水位线高度,并设定初始补上以及最大迭代次数;迭代计算水位线高度,使得假定的水位线高度逐渐逼近实际水位线高度,步长绝对值小于0.5厘米或迭代次数超过最大迭代次数时,迭代计算结束,得到水位线高度即为车辆涉水深度。
13.所述检测方法还包括:步骤3、计算出的涉水深度与预设的报警等级阈值进行比较,得到相应的涉水等级;环视系统输出的图像上依据车辆水等级叠加文字或图表提示,并通过can信号将涉水等级报警发送给车辆仪表盘,仪表盘做出相应的提示。
14.采用上述方案后,本发明基于传统环视系统增加车辆涉水检测和报警功能,通过环视摄像头识别和提取车轮涉水信息,由视频处理主机通过涉水算法计算出车辆左/右前轮涉水深度,并与阈值做判断计算出车辆涉水等级,在环视系统输出图像上叠加涉水报警提示,并通过can总线将涉水等级报警信号发送给仪表盘做提示,方便驾驶员实时监控车俩涉水情况,提高车辆安全性能。
附图说明
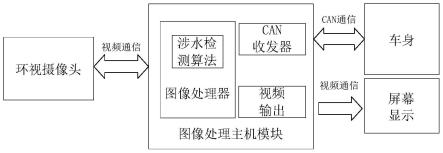
15.图1为涉水系统原理框图;图2为涉水系统内部原理框图;图3车辆涉水深度计算示意图;图4为车辆涉水深度计算流程图。
具体实施方式
16.如图1和图2所示,本发明揭示了一种基于环视影像系统的涉水检测系统,其包括视频接收模块和图像处理模块。其中,视频接收模块连接车辆的环视影像系统,用于接收环视影像系统的各个摄像头捕捉的图像数据,并将其发送到图像处理模块。图像处理模块用于将图像数据进行缓存和处理,处理如下:通过卷积神经网络对前后视频帧进行分类,预测对应的视频帧有误技术,在有积水的视频帧中计算涉水深度。
17.计算涉水深度的方法如下:对于有积水的视频帧图像,通过边缘梯度算法或深度学习算法检测出车轮与水面的接触位置;假定一个初始水位线高度,并设定初始补上以及最大迭代次数;
迭代计算水位线高度,使得假定的水位线高度逐渐逼近实际水位线高度,步长绝对值小于0.5厘米或迭代次数超过最大迭代次数时,迭代计算结束,得到水位线高度即为车辆涉水深度。
18.图像处理模块还用于将计算出的涉水深度与预设的报警等级阈值进行比较,得到相应的涉水等级。
19.图像处理模块包括图像处理单元、ddr单元和flas/emmc模块,所述ddr单元用于缓存视频接收模块发送的图像数据;所述flas/emmc模块用于存储涉水深度计算的程序以及相应的配置参数,该配置参数包括摄像头的内参和外参、以及预设的报警等级阈值。图像处理模块连接有can收发器和视频输出模块,所述图像处理模块通过can收发器将车辆涉水深度发送到车身;所述图像处理模块通过视频输出模块输出车辆涉水深度信息以及涉水等级。
20.基于同一发明构思,本发明还揭示了一种基于环视影像系统的涉水检测方法,其包括以下步骤:步骤1、获取车辆环视影像系统捕获的车辆周围的图像数据。
21.安装在车头/车尾和左/右后视镜上的摄像头捕捉车辆周围的环境并形成数字视频信号;该数字视频信号通过视频传输通道输入到图像处理模块中,就形成了涉水检测所需要的的图像数据。
22.步骤2、对获取的图像数据处理:通过卷积神经网络对前后视频帧进行分类,预测对应的视频帧有误技术,在有积水的视频帧中计算涉水深度。计算涉水深度的方法如下:对于有积水的视频帧图像,通过边缘梯度算法或深度学习算法检测出车轮与水面的接触位置;假定一个初始水位线高度,并设定初始补上以及最大迭代次数;迭代计算水位线高度,使得假定的水位线高度逐渐逼近实际水位线高度,步长绝对值小于0.5厘米或迭代次数超过最大迭代次数时,迭代计算结束,得到水位线高度即为车辆涉水深度。
23.步骤3、将计算出的涉水深度与预设的报警等级阈值进行比较,得到相应的涉水等级;然后将车辆水涉水等级叠加文字或图标提示,并通过can信号发送给车辆仪表盘,仪表盘做出相应的提示。
24.本实施例中,涉水等级可分为轻度涉水、中度涉水和危险涉水。一般情况下,轻度涉水和中度涉水可以仅仅在仪表盘上显示,而危险涉水时,除了在仪表盘显示,还可以辅助以声音进行报警。
25.本发明基于传统环视系统增加车辆涉水检测和报警功能,通过环视摄像头识别和提取车轮涉水信息,由视频处理主机通过涉水算法计算出车辆左/右前轮涉水深度,并与阈值做判断计算出车辆涉水等级,在环视系统输出图像上叠加涉水报警提示,并通过can总线将涉水等级报警信号发送给仪表盘做提示,方便驾驶员实时监控车俩涉水情况,提高车辆安全性能。
26.以上所述,仅是本发明实施例而已,并非对本发明的技术范围作任何限制,故凡是依据本发明的技术实质对以上实施例所作的任何细微修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。