1.本发明涉及飞行模拟相关技术领域,具体是一种基于增强型虚拟现实的轻量化在线飞行模拟系统。
背景技术:
2.在通航领域,随着我国低空开放,通用航空会迅速崛起,航空俱乐部和航校对于轻型飞机飞行训练器的需求也与日俱增,对于航空飞行人员以及航空飞行相关领域的专业人员的需求存在着巨大的缺口,进而对于飞行模拟设备、维修培训设备和空中交通管制培训设备的需求保守估计在20亿元以上。另一方面,随着国民经济发展和人民生活水平的提高,对于体验类消费的需求也日益增长,初步估算国内约有50亿元的巨大市场空间。因此,本项目产品除满足飞行员培训的各类需求的同时,在消费领域提供极为真实可靠的飞行感受,同时加入仿真技术和虚拟现实技术的应用,具有广阔的市场前景。
3.传统的飞行模拟器面向专业飞行训练和设计院所的工程应用,该市场主要被外国厂商和少数国有企业关注,多为大型项目,设计周期长,资金占用大,实施风险高。国内仿真技术较为落后,并且应用集中在军事、民用航空等高端技术领域。
技术实现要素:
4.本发明的目的在于提供一种基于增强型虚拟现实的轻量化在线飞行模拟系统,以解决现有技术中的问题。
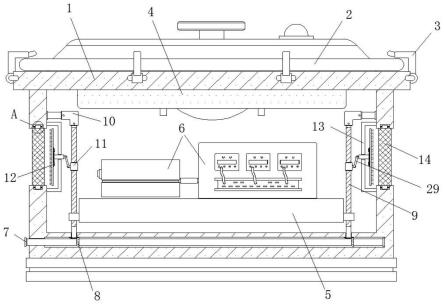
5.为实现上述目的,本发明提供如下技术方案:一种基于增强型虚拟现实的轻量化在线飞行模拟系统,包括仿真平台、舱内操纵组件、增强型虚拟现实系统、六自由度运动机构、仪表数据接口、仪表系统和仿真控制系统;
6.所述仪表数据接口和仪表系统连接,所述舱内操纵组件、增强型虚拟现实系统、六自由度运动机构、仪表数据接口、仪表系统和仿真控制系统均与仿真平台连接。
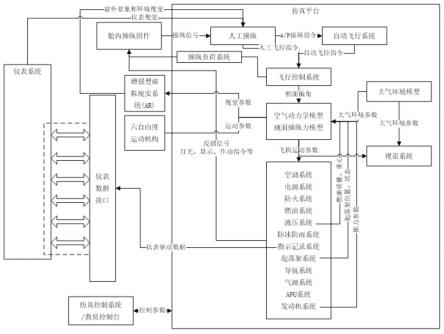
7.优选的,所述仿真系统包括人工操纵模块、自动飞行系统、操作负荷系统、飞行控制系统、空气动力学模型及地面操纵力模型、大气环境模型、视景系统和综合系统模块;所述人工操纵模块通过a/p操纵指令控制自动飞行系统,所述人工操纵模块和自动飞行系统分别通过飞控指令控制飞行控制系统,且飞行控制系统与操作负荷系统连接,所述飞行控制系统与空气动力学模型及地面操纵力模型连接,所述空气动力学模型及地面操纵力模型与综合系统模块连接,所述空气动力学模型及地面操纵力模型还与视景系统连接,所述大气环境模型分别与空气动力学模型及地面操纵力模型和视景系统连接。
8.优选的,所述舱内操纵组件与通过操纵信号与人工操纵模块连接,所述空气动力学模型及地面操纵力模型分别与增强型虚拟现实系统和六自由度运动机构连接;所述增强型虚拟现实系统与人工操纵模块连接,所述仪表系统与人工操纵模块连接。
9.优选的,所述综合系统模块包括空调系统、电源系统、防火系统、燃油系统、液压系统、防冰防雨系统、指示记录系统、起落架系统、导航系统、气源系统、apu系统和发动机系
统。
10.优选的,所述空气动力学数学模型包括气动系数模型、空气动力和力矩的数学模型,根据飞行仿真模型的其他模型参量计算出高度、迎角、侧滑角和飞机绕机体轴的角速度等飞行参数以及舵偏角,采用线性插值或非线性拟合方法计算出飞机某时刻的气动导数,并计算出机体坐标下飞机的气动力和气动力矩,用于运动方程求解。
11.优选的,所述大气环境模型包括静态大气模型和动态大气模型,静态大气模型根据国际标准大气和修正计算与飞机高度相关的参数,动态大气模型计算模拟大气扰动的情况。
12.与现有技术相比,本发明的有益效果是:基于沉浸式显示系统或增强型虚拟现实系统(ar)的轻量化飞行训练系统,能够依靠光学投射式头盔显示器和头部追踪系统实现方位跟踪、虚实融合配合舱内的真实操纵组件和仪表系统,实现功能完善、沉浸感强、成本低廉便于安装部署的航空训练系统;在飞行模拟中采用的ar系统为基于光学原理的穿透式头盔式显示器,可以极大程度地增强用户的视觉沉浸感;系统将真实世界信息和虚拟世界信息“无缝”集成,把原本在现实世界的一定时间空间范围内很难体验到的实体信息通过图形发生器(ig),模拟仿真后再叠加,将虚拟的信息应用到真实世界,被人类感官所感知,从而达到超越现实的感官体验;将真实的驾驶舱环境和虚拟窗外环境景象实时地叠加到同一个画面或空间同时存在,不仅展现了真实世界的信息,而且将虚拟的信息同时显示出来,两种信息相互补充、叠加;空气动力学仿真模型、动力装置模型、大气环境仿真模型、航空电子系统模型、飞行控制系统模型和飞机系统仿真模型等;通过并行计算和分布式控制方法进行统一的资源配置和调度,满足中国民用航空局《飞行模拟设备的鉴定和使用规则(ccar60)》的各项要求;项目通过对国外成熟技术的消化和吸收,建立适用于高等级飞行训练系统的空气动力学模型、地面操纵力和力矩模型、质量特性模型和运动方程模型,配合飞控系统模型和相关组件,使整机的实时反馈数据满足特定机型的qtg测试要求;其中空气动力学数学模型包括气动系数模型(包括对气动弹性的修正)、空气动力和力矩的数学模型,根据飞行仿真模型的其他模型参量计算出高度、迎角、侧滑角和飞机绕机体轴的角速度等飞行参数以及舵偏角,采用线性插值或非线性拟合方法计算出飞机某时刻的气动导数,并计算出机体坐标下飞机的气动力和气动力矩,用于运动方程求解;运动学数学模型飞机的力和力矩,如重力、气动力、发动机推力、起落架和地面的接触力等,采用六自由度全量非线性运动方程,完成飞机六自由度飞行状态和运动参数的解算,计算出机体坐标系下的三轴加速度和三轴角速度,经过四阶runger-kutta积分得到飞机的速度和位移量等,根据几何空间变换关系得到飞机的姿态、位置等飞行参数;动力装置模型通过建立发动机系统的工作状态控制模型、发动机转速与推力/拉力模型、燃油消耗模型及油箱流量控制模型和发动机故障状态模型等实现发动机数据的解算;大气环境模型包括静态大气模型和动态大气模型,静态大气模型根据国际标准大气(isa)和修正计算与飞机高度相关的参数,如大气压力、密度、温度等,动态大气模型计算模拟大气扰动的情况,如晴空紊流、风切表等扰动风场模型;在航电系统仿真方面,目前国内的飞行训练系统对于航空电子系统尤其是飞行管理系统(fms)、自动飞行控制系统(dfcs)、失速管理偏航阻尼计算机(smyd)等先进航电设备的仿真度不足,本项目利用国外成熟机型的开发经验,采用re-host和re-engineering等方法,建立满足机组训练要求的航电仿真模块;其中,re-host是目前较为新型的技术,通过在标准
计算机环境中利用虚拟机等技术建立满足机载航空电子运行的环境,并保持arinc429/adfx等总线连接环境,按照标准航电系统的速率和接口参数进行定义和运行,从而实现机载系统的“再宿主”,实现高精度航电系统仿真;re-engineering采用辨识建模技术,利用航电系统运行或实验过程中测量得到的操作反馈和接口数据,参考机载软件设计文档srd、fdd等资料,实现航电系统的仿真和拟合。
附图说明
13.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
14.图1是本发明的原理图;
15.图2是本发明数据以及信号采集的原理图。
具体实施方式
16.为使本发明实施方式的目的、技术方案和优点更加清楚,下面将结合本发明实施方式中的附图,对本发明实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本发明一部分实施方式,而不是全部的实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。因此,以下对在附图中提供的本发明的实施方式的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。
17.请参阅图1-2,本发明实施例中,一种基于增强型虚拟现实的轻量化在线飞行模拟系统,包括仿真平台、舱内操纵组件、增强型虚拟现实系统、六自由度运动机构、仪表数据接口、仪表系统和仿真控制系统;
18.所述仪表数据接口和仪表系统连接,所述舱内操纵组件、增强型虚拟现实系统、六自由度运动机构、仪表数据接口、仪表系统和仿真控制系统均与仿真平台连接。
19.优选的,所述仿真系统包括人工操纵模块、自动飞行系统、操作负荷系统、飞行控制系统、空气动力学模型及地面操纵力模型、大气环境模型、视景系统和综合系统模块;所述人工操纵模块通过a/p操纵指令控制自动飞行系统,所述人工操纵模块和自动飞行系统分别通过飞控指令控制飞行控制系统,且飞行控制系统与操作负荷系统连接,所述飞行控制系统与空气动力学模型及地面操纵力模型连接,所述空气动力学模型及地面操纵力模型与综合系统模块连接,所述空气动力学模型及地面操纵力模型还与视景系统连接,所述大气环境模型分别与空气动力学模型及地面操纵力模型和视景系统连接。
20.优选的,所述舱内操纵组件与通过操纵信号与人工操纵模块连接,所述空气动力学模型及地面操纵力模型分别与增强型虚拟现实系统和六自由度运动机构连接;所述增强型虚拟现实系统与人工操纵模块连接,所述仪表系统与人工操纵模块连接。
21.优选的,所述综合系统模块包括空调系统、电源系统、防火系统、燃油系统、液压系统、防冰防雨系统、指示记录系统、起落架系统、导航系统、气源系统、apu系统和发动机系统。
22.优选的,所述空气动力学数学模型包括气动系数模型、空气动力和力矩的数学模型,根据飞行仿真模型的其他模型参量计算出高度、迎角、侧滑角和飞机绕机体轴的角速度等飞行参数以及舵偏角,采用线性插值或非线性拟合方法计算出飞机某时刻的气动导数,并计算出机体坐标下飞机的气动力和气动力矩,用于运动方程求解。
23.优选的,所述大气环境模型包括静态大气模型和动态大气模型,静态大气模型根据国际标准大气和修正计算与飞机高度相关的参数,动态大气模型计算模拟大气扰动的情况。
24.基于沉浸式显示系统或增强型虚拟现实系统(ar)的轻量化飞行训练系统,能够依靠光学投射式头盔显示器和头部追踪系统实现方位跟踪、虚实融合配合舱内的真实操纵组件和仪表系统,实现功能完善、沉浸感强、成本低廉便于安装部署的航空训练系统。
25.在飞行模拟中采用的ar系统为基于光学原理的穿透式头盔式显示器,可以极大程度地增强用户的视觉沉浸感。系统将真实世界信息和虚拟世界信息“无缝”集成,把原本在现实世界的一定时间空间范围内很难体验到的实体信息通过图形发生器(ig),模拟仿真后再叠加,将虚拟的信息应用到真实世界,被人类感官所感知,从而达到超越现实的感官体验。将真实的驾驶舱环境和虚拟窗外环境景象实时地叠加到同一个画面或空间同时存在,不仅展现了真实世界的信息,而且将虚拟的信息同时显示出来,两种信息相互补充、叠加;
26.空气动力学仿真模型、动力装置模型、大气环境仿真模型、航空电子系统模型、飞行控制系统模型和飞机系统仿真模型等。通过并行计算和分布式控制方法进行统一的资源配置和调度,满足中国民用航空局《飞行模拟设备的鉴定和使用规则(ccar60)》的各项要求。项目通过对国外成熟技术的消化和吸收,建立适用于高等级飞行训练系统的空气动力学模型、地面操纵力和力矩模型、质量特性模型和运动方程模型,配合飞控系统模型和相关组件,使整机的实时反馈数据满足特定机型的qtg测试要求。
27.其中空气动力学数学模型包括气动系数模型(包括对气动弹性的修正)、空气动力和力矩的数学模型,根据飞行仿真模型的其他模型参量计算出高度、迎角、侧滑角和飞机绕机体轴的角速度等飞行参数以及舵偏角,采用线性插值或非线性拟合方法计算出飞机某时刻的气动导数,并计算出机体坐标下飞机的气动力和气动力矩,用于运动方程求解。运动学数学模型飞机的力和力矩,如重力、气动力、发动机推力、起落架和地面的接触力等,采用六自由度全量非线性运动方程,完成飞机六自由度飞行状态和运动参数的解算,计算出机体坐标系下的三轴加速度和三轴角速度,经过四阶runger-kutta积分得到飞机的速度和位移量等,根据几何空间变换关系得到飞机的姿态、位置等飞行参数。
28.动力装置模型通过建立发动机系统的工作状态控制模型、发动机转速与推力/拉力模型、燃油消耗模型及油箱流量控制模型和发动机故障状态模型等实现发动机数据的解算。
29.大气环境模型包括静态大气模型和动态大气模型,静态大气模型根据国际标准大气(isa)和修正计算与飞机高度相关的参数,如大气压力、密度、温度等,动态大气模型计算模拟大气扰动的情况,如晴空紊流、风切表等扰动风场模型。在航电系统仿真方面,目前国内的飞行训练系统对于航空电子系统尤其是飞行管理系统(fms)、自动飞行控制系统(dfcs)、失速管理偏航阻尼计算机(smyd)等先进航电设备的仿真度不足,本项目利用国外成熟机型的开发经验,采用re-host和re-engineering等方法,建立满足机组训练要求的航
电仿真模块。
30.其中,re-host是目前较为新型的技术,通过在标准计算机环境中利用虚拟机等技术建立满足机载航空电子运行的环境,并保持arinc429/adfx等总线连接环境,按照标准航电系统的速率和接口参数进行定义和运行,从而实现机载系统的“再宿主”,实现高精度航电系统仿真;re-engineering采用辨识建模技术,利用航电系统运行或实验过程中测量得到的操作反馈和接口数据,参考机载软件设计文档srd、fdd等资料,实现航电系统的仿真和拟合。
31.本发明的工作原理是:基于沉浸式显示系统或增强型虚拟现实系统(ar)的轻量化飞行训练系统,能够依靠光学投射式头盔显示器和头部追踪系统实现方位跟踪、虚实融合配合舱内的真实操纵组件和仪表系统,实现功能完善、沉浸感强、成本低廉便于安装部署的航空训练系统;在飞行模拟中采用的ar系统为基于光学原理的穿透式头盔式显示器,可以极大程度地增强用户的视觉沉浸感;系统将真实世界信息和虚拟世界信息“无缝”集成,把原本在现实世界的一定时间空间范围内很难体验到的实体信息通过图形发生器(ig),模拟仿真后再叠加,将虚拟的信息应用到真实世界,被人类感官所感知,从而达到超越现实的感官体验;将真实的驾驶舱环境和虚拟窗外环境景象实时地叠加到同一个画面或空间同时存在,不仅展现了真实世界的信息,而且将虚拟的信息同时显示出来,两种信息相互补充、叠加;空气动力学仿真模型、动力装置模型、大气环境仿真模型、航空电子系统模型、飞行控制系统模型和飞机系统仿真模型等;通过并行计算和分布式控制方法进行统一的资源配置和调度,满足中国民用航空局《飞行模拟设备的鉴定和使用规则(ccar60)》的各项要求;项目通过对国外成熟技术的消化和吸收,建立适用于高等级飞行训练系统的空气动力学模型、地面操纵力和力矩模型、质量特性模型和运动方程模型,配合飞控系统模型和相关组件,使整机的实时反馈数据满足特定机型的qtg测试要求;其中空气动力学数学模型包括气动系数模型(包括对气动弹性的修正)、空气动力和力矩的数学模型,根据飞行仿真模型的其他模型参量计算出高度、迎角、侧滑角和飞机绕机体轴的角速度等飞行参数以及舵偏角,采用线性插值或非线性拟合方法计算出飞机某时刻的气动导数,并计算出机体坐标下飞机的气动力和气动力矩,用于运动方程求解;运动学数学模型飞机的力和力矩,如重力、气动力、发动机推力、起落架和地面的接触力等,采用六自由度全量非线性运动方程,完成飞机六自由度飞行状态和运动参数的解算,计算出机体坐标系下的三轴加速度和三轴角速度,经过四阶runger-kutta积分得到飞机的速度和位移量等,根据几何空间变换关系得到飞机的姿态、位置等飞行参数;动力装置模型通过建立发动机系统的工作状态控制模型、发动机转速与推力/拉力模型、燃油消耗模型及油箱流量控制模型和发动机故障状态模型等实现发动机数据的解算;大气环境模型包括静态大气模型和动态大气模型,静态大气模型根据国际标准大气(isa)和修正计算与飞机高度相关的参数,如大气压力、密度、温度等,动态大气模型计算模拟大气扰动的情况,如晴空紊流、风切表等扰动风场模型;在航电系统仿真方面,目前国内的飞行训练系统对于航空电子系统尤其是飞行管理系统(fms)、自动飞行控制系统(dfcs)、失速管理偏航阻尼计算机(smyd)等先进航电设备的仿真度不足,本项目利用国外成熟机型的开发经验,采用re-host和re-engineering等方法,建立满足机组训练要求的航电仿真模块;其中,re-host是目前较为新型的技术,通过在标准计算机环境中利用虚拟机等技术建立满足机载航空电子运行的环境,并保持arinc429/adfx等总线连接环境,按照
标准航电系统的速率和接口参数进行定义和运行,从而实现机载系统的“再宿主”,实现高精度航电系统仿真;re-engineering采用辨识建模技术,利用航电系统运行或实验过程中测量得到的操作反馈和接口数据,参考机载软件设计文档srd、fdd等资料,实现航电系统的仿真和拟合。
32.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。