1.本发明涉及绝缘子检修技术领域,具体涉及一种绝缘子污秽度自动识别装置。
背景技术:
2.绝缘子被大量使用在电网建设中,起着电气绝缘与机械固定的重要作用,而由于其工作环境是室外,积污是不可避免的,当这些污秽物质受潮溶解时,就会在绝缘子表面形成导电层,在正常运行电压的作用下,绝缘子就极有可能发生放电现象,进一步会导致停电等严重事故,这便是令电网公司十分头疼的“污闪”现象。相关研究表明,“污闪”现象与绝缘子表面污秽物质的成分与浓度有着密切的联系,如果能够准确掌握绝缘子的污秽度信息,就能够更有针对性地开展清扫工作,对“污闪”现象的防治有着十分积极的现实意义。
3.目前,缺乏能够一键式自动化完成绝缘子的运送、翻转、高光谱图像拍摄等操作的自动识别装置,有助于节省大量人力物力、极大地提高绝缘子污秽度识别的效率。
技术实现要素:
4.为解决现有技术所存在的技术问题,本发明提供一种绝缘子污秽度自动识别装置,可以实现绝缘子污秽检测时绝缘子运送、翻转动作的自动化,弥补了当前绝缘子污秽检测相关研究基本没有形成自动化检测装置的不足,使绝缘子污秽检测工作的效率得到了显著的提高。
5.绝缘子污秽度自动识别装置,所述自动识别装置包括:数据采集模块、升降门模块、运送台模块、机械夹爪模块和控制模块,数据采集模块、升降门模块、运送台模块、机械夹爪模块均与控制模块电连接;
6.控制模块用于控制整个装置按照设定工作流程运行;
7.数据采集模块,用于采集被测绝缘子的高光谱图像;
8.升降门模块用于提供绝缘子进出暗室的通道;
9.运送台模块用于将被测绝缘子运送至设定位置;
10.机械夹爪模块用于通过机械夹爪的升降、开合和旋转动作将绝缘子上下翻面。
11.优选的技术方案中,所述控制模块包括工控机和plc子模块,plc子模块与工控机间通过tcp协议通信。
12.所述控制模块包括工控机和plc子模块,plc子模块与工控机间通过tcp协议通信,plc子模块分别与升降门模块、运送台模块、机械夹爪模块电连接。
13.所述数据采集模块包括高光谱仪、配套对称光源和底座,高光谱仪、配套对称光源均固定在底座上,配套对称光源对称分布设置在高光谱仪的两侧,高光谱仪与工控机电连接。
14.所述升降门模块包括升降门模块包括升降门、同步带直线模组、电机驱动器和至少两个光电开关;电机驱动器与plc子模块电连接,同步带直线模组上设有滑块,升降门与同步带直线模组上的滑块固定连接,光电开关固定在同步带直线模组侧面,电机驱动器安
装在plc子模块中。
15.所述运送台模块运送台模块包含绝缘子运送台、电机驱动器、步进电机、直线模组和3个光电开关;绝缘子运送台上设置3个支架,每个支架的一端都设置若干长度的槽口,3个支架通过螺丝与运送台底部固定连接,螺丝安装在支架的的槽口内;电机驱动器与plc子模块电连接,绝缘子运动台安装在直线模组上,三个光电开关固定在直线模组的侧面,电机安装直线模组的一端。
16.所述机械夹爪内设置两个接近开关,分别用于控制机械夹爪的开、合动作;机械夹爪后部设置两个接近开关,机械夹爪后部的两个接近开关的安装位置在一条直线上,分别用于判断机械夹爪是否逆时针或顺时针旋转了180
°
,机械夹爪后部设置了一个突出的金属螺母,用于作为机械夹爪后部的两个接近开关相应的检测目标。
17.本发明与现有技术相比,具有如下优点和有益效果:
18.本发明提供的绝缘子污秽度自动识别装置,包括数据采集模块、升降门模块、运送台模块、机械夹爪模块和控制模块,可以实现绝缘子污秽检测时绝缘子运送、翻转等动作的自动化,弥补了当前绝缘子污秽检测相关研究基本没有形成自动化检测装置的不足,使绝缘子污秽检测工作的效率得到了显著的提高,节省了大量人力、物力。
附图说明
19.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其他的附图。
20.图1是本发明实施例中的绝缘子污秽度自动识别装置的结构示意图;
21.图2是本发明实施例中的plc子模块的结构示意图;
22.图3是本发明实施例中的数据采集模块结构示意图;
23.图4是本发明实施例中的升降门模块结构示意图;
24.图5是本发明实施例中的运送台模块结构示意图;
25.图6是本发明实施例中的机械夹爪模块结构示意图;
26.图7是本发明实施例中的绝缘子污秽度自动识别装置的整体示意图;
27.图8是本发明实施例中的绝缘子污秽度自动识别装置的工作原理流程图;
28.图中标号为:1-高光谱仪,2-配套对称光源,3-升降门,4-同步带直线模组,5-绝缘子运送台,6-直线模组,7-步进电机,8-机械夹爪,9-开合电机,10-旋转电机,11-升降电机。
具体实施方式
29.下面将结合附图和实施例,对本发明技术方案做进一步详细描述,显然所描述的实施例是本发明一部分实施例,而不是全部的实施例,本发明的实施方式并不限于此。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
30.实施例1:
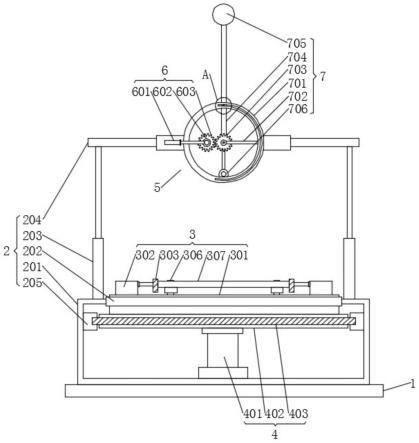
31.如图1所示,绝缘子污秽度自动识别装置的结构示意图,本发明所述的一种绝缘子
污秽度自动识别装置,该装置包括数据采集模块、升降门模块、运送台模块、机械夹爪模块和控制模块,数据采集模块、升降门模块、运送台模块、机械夹爪模块均与控制模块电连接。
32.控制模块用于控制整个装置按照设定工作流程运行,包括工控机和plc子模块,plc子模块与工控机间通过tcp协议通信连接,plc子模块分别与驱动升降门模块、运送台模块、机械夹爪模块电连接,工控机与数据采集模块连接。其中工控机存储了高光谱仪触发程序、数据转换程序、绝缘子污秽度自动识别模型与人机交互界面。
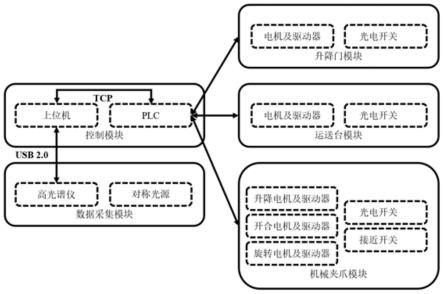
33.plc子模块用于控制各硬件设备执行设定动作,包括两块可编程逻辑控制器(programmable logic controller,plc)、一块主处理器、从处理器和电源,电源包括配套电源和外接电源。优选地,plc子模块包括两块simatic s7-200 smart型号plc与配套st30型号cpu、一块pm207型号配套电源、两块lrs-100-24型号开关电源组成。主cpu、从cpu间通过rs485连接与modbus rtu通信,plc子模块与工控机间通过tcp协议通信,plc子模块分别驱动升降门模块、运送台模块、机械夹爪模块电连接。如图2所示,plc子模块的结构示意图。
34.驱动升降门模块、运送台模块以及机械夹爪模块的相应的驱动器是根据plc程序的指令控制电机工作时的脉冲数与脉冲频率,以实现设定动作。驱动升降门模块、运送台模块以及机械夹爪模块的相应的驱动器的具体型号如下:
35.表1
[0036][0037][0038]
数据采集模块用于采集被测绝缘子的高光谱图像,包括高光谱仪1、配套对称光源2和底座,高光谱仪1、配套对称光源2均固定在底座上,配套对称光源2对称分布设置在高光谱仪的两侧,高光谱仪1通过usb 2.0与控制模块中的工控机相连,由工控机触发拍摄高光谱图像,同时拍摄的高光谱图像存储在工控机的制定存储空间中。
[0039]
本实施例中,高光谱仪选择了四川双利合谱科技有限公司出品的gaiafield-v10便携式高光谱成像仪,自然光在高光谱仪光谱范围内是不均匀分布的,会给在自然环境下拍摄的高光谱图像带来干扰,不利于后续的污秽度等级识别。为此,设计高光谱图像拍摄在暗室环境下进行,也就需要补充光源,因此使用了gaiafield配套光源,型号为hsia-ls-t-200w,其能够提供完整、均匀分布在高光谱仪光谱范围内的补充光。数据采集模块结构示意图,如图3所示。
[0040]
升降门模块用于提供绝缘子进出暗室的通道,升降门模块包括升降门3、同步带直线模组4、电机驱动器和至少两个光电开关,电机驱动器与控制模块中的plc子模块相连,根
据plc的指令驱动电机实现升降门的抬起或放下动作;同步带直线模组4上设有滑块,升降门3与同步带直线模组上的滑块固定连接,以顺利实现上下运动,两个光电开关固定在同步带直线模组侧面;电机驱动器安装在plc子模块中,电机驱动器要与plc连接,安装在一起方便接线。
[0041]
同步带直线模组用于驱动升降门抬起或放下,同步带直线模组及电机驱动器用于更快速、便捷地实现升降门的升降动作;光电开关优选为两个,两个光电开关分用于判定升降门是否达到放下位置、抬起位置。本实施例中,同步带直线模组使用的是qrxq品牌rxp45型号,其内含一个5756步进电机,有效行程为500mm,定位精度为0.05mm,参考负载是10kg,能够满足设计需要,光电开关均选择了欧姆龙ee-sx951-w型号24v光电开关。升降门模块结构示意图,如图4所示。
[0042]
运送台模块用于将被测绝缘子运送至设定位置,运送台模块包含绝缘子运送台5、电机驱动器6、电机7、直线模组和三个光电开关,绝缘子运送台5上设置三个支架,每个支架的一端都设置若干长度的槽口,三个支架通过螺丝与运送台底部固定连接,螺丝安装在支架的的槽口内,通过移动每个支架的槽口固定的位置,就可以调整支架适用直径,以适配不同直径大小的被测绝缘子;运送台模块的电机驱动器与控制模块中的plc相连,根据plc的指令驱动电机实现绝缘子运送台的直线运动;绝缘子运动台安装在直线模组上,三个光电开关固定在直线模组侧面,电机安装直线模组的一端,这里的直线模组起支撑、固定作用。
[0043]
运送台模块上设有被测绝缘子可以被更换放置的初始位置、被拍摄高光谱图像的拍摄位置、被机械夹爪夹紧的翻面位置,三个光电开关用于检测而被测绝缘子是否到达初始位置、拍摄位置、翻面位置三个位置。本实施例中,电机选择了维科特stp-60d5012型号60mm两相混合步进电机,其保持转矩t为3.03n
·
m,所加滚珠丝杠导程s为5mm。运送台模块结构示意图,如图5所示。
[0044]
如图6-7所示,机械夹爪模块用于通过机械夹爪的升降、开合和旋转动作将绝缘子上下翻面,便于高光谱仪采集被测绝缘子上表面、下表面的高光谱图像。机械夹爪模块包括机械夹爪8、开合电机9,旋转电机10,升降电机11、3个光电开关、4个接近开关和直线模组,升降电机安装在直线模组的顶端,开合电机安装在机械夹爪内部,旋转电机安装在机械夹爪尾端,直线模组上设置有滑块,机械夹爪与直线模组的滑块固定连接,机械夹爪可顺畅移动;三台电机驱动器与控制模块中的plc相连,根据plc的指令驱动电机实现机械夹爪的升降、开合和旋转运动。
[0045]
直线模组上设置三个不同设定位置,三个不同设定位置分别为合拢位置c1、张开位置c2、和旋转位置c3,合拢位置c1、张开位置c2、旋转位置c3位置均设置一个光电开关,光电开关用于检测机械夹爪是否到达预定的位置。机械夹爪位于张开位置时不会影响绝缘子高光谱图像拍摄,可以张开放下绝缘子,位于旋转位置时可以旋转180
°
完成绝缘子翻面,位于合拢位置实可以夹紧绝缘子。
[0046]
机械夹爪内设有两个接近开关f、g安装,在分别用于控制机械夹爪的设定开、合程度;机械夹爪旋转模组上设有两个接近开关d、e,接近开关d、e水平安装机械夹爪后部,分别用于判断机械夹爪是否逆时针或顺时针旋转了180
°
;机械夹爪后部设置了一个突出的金属螺母,用于作为机械夹爪后部的两个接近开关的检测目标。各设备的定位通过光电开关实现,机械夹爪旋转角度的控制与合拢状态的判定通过接近开关实现。
[0047]
本实施例中,机械夹爪的接近开关全部选择了鑫社电气m4螺纹24v接近开关。机械夹爪升降电机是ub60d24-d48-488型号60mm两相混合刹车步进电机,其保持转矩t为3.0n
·
m,所加丝杠导程s为10mm;机械夹爪开合电机是维科特stc-57h1030-127-095-e1000型号丝杆步进电机,其保持力矩t为0.7n
·
m,螺纹导程s为1.27mm;机械夹爪旋转电机是维科特57pg005-d42-0442型号57mm标准减速步进电机,其保持转矩为3.4n
·
m。本装置所用电机驱动器的型号如表1所示。
[0048]
装置工作原理:
[0049]
如图8所示,绝缘子污秽度自动识别装置的工作原理流程图,操作人员将被测绝缘子下表面朝上平稳放置在绝缘子运送台上,工作流程启动前,升降门位于设定抬起位置,绝缘子运送台在设定初始位置,机械夹爪处于设定张开位置,并且处于水平、设定张开状态。工作流程启动后,首先绝缘子运送台会将被测绝缘子运送至设定拍摄位置,然后升降门将下降至设定放下位置形成暗室,高光谱仪便开始采集被测绝缘子下表面的高光谱图像。采集完成后,机械夹爪将下降至设定合拢位置。紧接着,绝缘子运送台将运送被测绝缘子至设定翻面位置,机械夹爪便顺势合拢至设定状态以夹紧绝缘子的钢帽部分,并带着绝缘子上升至设定旋转位置,继而旋转180
°
来完成绝缘子的翻面动作。接下来,机械夹爪会下降回张开位置,并张开至设定状态以放下被测绝缘子。随后,绝缘子运送台又将被测绝缘子运送至拍摄位置,高光谱仪便开始采集被测绝缘子上表面的高光谱图像。采集完成后,升降门将上升至抬起位置打开进出暗室的通道,绝缘子运送台便将被测绝缘子运出回初始位置,此后,更换放置下一个需要检测的污秽绝缘子,重新触发装置启动即可重复上述工作流程。
[0050]
上述实施例为本发明较佳的实施方式,但本发明的实施方式并不受上述实施例的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。