技术特征:
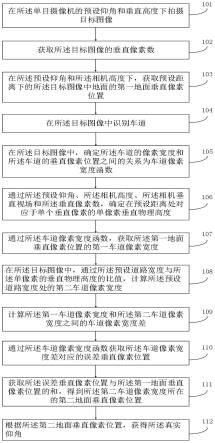
1.一种仰角校正方法,应用于车辆中的单目摄像机,其特征在于,所述方法包括:在所述单目摄像机的预设仰角和相机高度下拍摄目标图像;获取所述目标图像的垂直像素数;在所述预设仰角和所述相机高度下,获取预设距离下的所述目标图像中地面的第一地面垂直像素位置;在所述目标图像中识别车道;在所述目标图像中,确定所述车道的像素宽度和所述车道的垂直像素位置之间的关系为车道像素宽度函数;通过所述预设仰角、所述相机高度、所述相机垂直视场和所述垂直像素数,确定在预设距离处对应于单个垂直像素的单像素垂直物理高度;通过所述车道像素宽度函数,获取所述第一地面垂直像素位置的第一车道像素宽度;在所述目标图像中,通过所述预设道路宽度与所述单像素的垂直物理高度的比值,计算所述预设道路宽度处的第二车道像素宽度;计算所述第一车道像素宽度和所述第二车道像素宽度之间的车道像素宽度差;通过所述车道像素宽度函数获取所述车道像素宽度差对应的误差垂直像素位置;获取所述误差垂直像素位置与所述第一地面垂直像素位置的和,得到所述第二车道像素宽度所在的第二地面垂直像素位置;根据所述第二地面垂直像素位置,获得所述真实仰角。2.根据权利要求1所述的方法,其特征在于,通过公式组(1)、(2)、(3)实现所述根据所述第二地面垂直像素位置,获得所述真实仰角,其中,地面垂直像素位置,获得所述真实仰角,其中,地面垂直像素位置,获得所述真实仰角,其中,其中,θ
ele
为真实仰角,h
c
为所述单目摄像机的垂直高度,l为所述预设距离,mg0为所述第二地面垂直像素位置,mm为所述目标图像的垂直像素数,为所述单目摄像机的相机垂直视场。3.根据权利要求1所述的方法,其特征在于,还包括:在所述单目摄像机的所述真实仰角和垂直高度下,检测目标对象以及所述目标对象与所述单目摄像机之间的距离。4.根据权利要求1所述的方法,其特征在于,还包括:所述第二地面垂直像素位置对应的所述所述第二车道像素宽度为所述预设道路宽度与单个水平像素的单像素水平物理宽度之间的比值,其中,单个水平像素的单像素水平物理宽度可以通过公式(a4)表示,其中dw[meter/pixel]为单个水平像素的单像素水平物理宽度,l为预设距离,为
所述单目摄像机水平视场,nn为所述目标图像的水平像素数。5.根据权利要求1所述的方法,其特征在于,通过公式(4)表达所述车道像素宽度函数为:width[pixel]=f(m)=c0 c1*m
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4),其中,m为所述目标图像中的垂直像素位置,c0为固定参数,c1线性参数。6.根据权利要求5所述的方法,其特征在于,通过公式(5)实现所述通过所述车道像素宽度函数获取所述车道像素宽度差对应的误差垂直像素位置,其中,offset[pixel]=(width_1[pixel]-width_2[pixel])/c1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5),其中,width_1[pixel]为所述第一地面垂直像素位置对应的所述第一车道像素宽度,width_2[pixel]为所述第二地面垂直像素位置对应的所述所述第二车道像素宽度,offset[pixel]为所述车道像素宽度差对应的误差垂直像素位置。7.根据权利要求1所述的方法,其特征在于,通过公式(6)实现所述通过所述预设仰角、所述相机高度、所述相机垂直视场和所述垂直像素数,确定在预设距离处对应于单个垂直像素的单像素垂直物理高度,其中,其中,dh[m/pixel]为所述目标图像的垂直像素高度,为所述单目摄像机的相机垂直视场,mm为所述目标图像的垂直像素数,l为所述预设距离。8.一种仰角校正装置,应用于车辆中的单目摄像机,其特征在于,所述装置包括:拍摄模块,用于在所述单目摄像机的预设仰角和相机高度下拍摄目标图像;垂直像素数获取模块,用于获取所述目标图像的垂直像素数;第一地面垂直像素位置获取模块,用于在所述预设仰角和所述相机高度下,获取预设距离下的所述目标图像中地面的第一地面垂直像素位置;车道识别模块,用于在所述目标图像中识别车道;车道像素宽度函数确定模块,用于在所述目标图像中,确定所述车道的像素宽度和所述车道的垂直像素位置之间的关系为车道像素宽度函数;垂直像素高度确定模块,用于通过所述预设仰角、所述相机高度、所述相机垂直视场和所述垂直像素数,确定在预设距离处对应于单个垂直像素的单像素垂直物理高度;第一车道像素宽度获取模块,用于通过所述车道像素宽度函数,获取所述第一地面垂直像素位置的第一车道像素宽度;第二车道像素宽度获取模块,用于在所述目标图像中,通过所述预设道路宽度与所述单像素的垂直物理高度的比值,计算所述预设道路宽度处的第二车道像素宽度;车道像素宽度差计算模块,用于计算所述第一车道像素宽度和所述第二车道像素宽度之间的车道像素宽度差;误差垂直像素位置获取模块,用于通过所述车道像素宽度函数获取所述车道像素宽度差对应的误差垂直像素位置;第二地面垂直像素位置获取模块,用于获取所述误差垂直像素位置与所述第一地面垂直像素位置的和,得到所述第二车道像素宽度所在的第二地面垂直像素位置;真实仰角获得模块,用于根据所述第二地面垂直像素位置,获得所述真实仰角。
9.根据权利要求8所述的装置,其特征在于,所述真实仰角获得模块包括:真实仰角获得子模块,用于通过公式组(1)、(2)、(3)实现所述根据所述第二地面垂直像素位置,获得所述真实仰角,其中,像素位置,获得所述真实仰角,其中,像素位置,获得所述真实仰角,其中,其中,θ
ele
为真实仰角,h
c
为所述单目摄像机的垂直高度,l为所述预设距离,mg0为所述第二地面垂直像素位置,mm为所述目标图像的垂直像素数,θ
fov
为所述单目摄像机的相机垂直视场。10.一种车辆,所述车辆包括单目摄像机,其特征在于,所述车辆还包括如权利要求7-9所述的仰角校正装置。
技术总结
本发明提供了一种仰角校正方法、装置及车辆,包括:在单目摄像机的预设仰角和相机高度下拍摄图像;获取预设距离下的图像中地面的第一地面垂直像素位置;在目标图像中识别车道并确定车道的像素宽度和车道的垂直像素位置之间的车道像素宽度函数后,获取预设距离下真实道路宽度在目标图像中的第二车道像素宽度;通过第一车道像素宽度和第二车道像素宽度之间的误差垂直像素位置,并获取其与第一地面垂直像素位置的和,得到第二车道像素宽度所在的第二地面垂直像素位置;根据第二地面垂直像素位置,获得真实仰角,基于真实仰角进行目标检测和距离检测,达到提高检测精度的目的。达到提高检测精度的目的。达到提高检测精度的目的。
技术研发人员:宫原俊二
受保护的技术使用者:毫末智行科技有限公司
技术研发日:2021.04.26
技术公布日:2022/11/10
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。