1.本实用新型属于三维立体扫描技术领域,具体涉及一种光声三维立体扫描系统。
背景技术:
2.近年来,随着人口数量的增长和资源的开发,地球陆地表面凡能供人类和生物栖息的地方,几乎有3/4被人类活动破坏,由于人类活动而造成的土地退化以及海洋和海岸退化日益严重。[1]深度开发已有陆地资源,扩大对未知土地和海洋资源的开发并研究其地形数据制定相应的改造计划迫在眉睫。而目前针对目前探测多种复杂地形数据的方法,又要兼顾测量时数字的更新频率,良好的视觉效果以进行实时监测和用户分析,同时满足摄影对三维建模监测技术的开发,所以需要完善相关测量系统的性能并且扩大其使用范围。而这两种主要技术与声学测量和光学测量密切相关。声学探测地形主要依赖测深声纳,auv自带能源,依靠自身的自治能力和控制自己以完成所赋予的使命,可以分为智能式和预编程式并独立完成制定任务的可操作系统,形成直观的三维地形图像用于构造整体地貌图样。测深声纳具有分辨率高,auv形成直观三维图像的特点;适应不同种类地形特征,同时在价格具有一定优势且兼顾数字的更新频率与良好视觉效果,改进实时监测和用户分析效果,在地形勘测中发挥不可替代的作用。
[0003]
目前已有的光学仪器和声纳系统分别对水下进行探测,但还未出现将光学仪器和声纳结合使用的仪器,并且传统的声纳正下方存在探测盲区,导致现存在的技术和仪器精度低,并且携带不便,成本高效率低,因此提出了一种光声三维立体扫描系统。
技术实现要素:
[0004]
本实用新型要解决的技术问题是克服现有的缺陷,提供一种光声三维立体扫描系统,以解决上述背景技术中提出的还未出现将光学仪器和声纳结合使用的仪器,并且传统的声纳正下方存在探测盲区,导致现存在的技术和仪器精度低,并且携带不便,成本高效率低的问题。
[0005]
为实现上述目的,本实用新型提供如下技术方案:一种光声三维立体扫描系统,包括下球体,所述下球体内侧的顶部固定连接有连接环,所述连接环顶部固定连接有连接板,所述连接板顶部设置有第一cpu、第二cpu、存储器和无线接收器,所述下球体底部设置有光学扫描仪和声纳测绘仪,所述光学扫描仪位于下球体的最底部,所述光学扫描仪与第一cpu电性连接,所述声纳测绘仪与第二cpu电性连接,所述第一cpu和第二cpu均与存储器电性连接,所述第一cpu和第二cpu通过无线接收器与计算机显控端通讯连接,所述下球体顶部设置有上球体。
[0006]
优选的,所述上球体顶部开设有通孔,所述连接板顶部的中间位置固定连接有支架,所述支架顶部固定连接有风机,所述风机的输出端固定连接有出风管,所述出风管位于通孔的内侧。
[0007]
优选的,所述通孔与出风管间隙配合。
[0008]
优选的,所述连接板顶部设置有gps模块。
[0009]
优选的,所述下球体内部位于连接板的底部设置有电池,所述上球体上端的外侧设置有充电接口。
[0010]
优选的,所述下球体外侧设置有触水开关。
[0011]
优选的,所述下球体顶部固定连接有螺纹套,所述下球体通过螺纹套与上球体螺纹连接。
[0012]
与现有技术相比,本实用新型提供了一种光声三维立体扫描系统,具备以下有益效果:
[0013]
1、本实用新型通过设置下球体,通过下球体底部的光学扫描仪进行光学点云扫描,发出激光到目标对象的表面,通过光学扫描仪中的ccd相机接收由目标地物反射的信息,根据记录的入射光和反射光之间的夹角,得出一系列点云数据;同时通过声纳测绘仪发射波束获取声呐图像,通过不同的物体表面反射声信号的强度和频谱信息来得到数据,所获取的光声数据分别通过第一cpu和第二cpu处理后存储在无线接收器中,再通过存储器传输到计算机显控端,从而在水下实现360
°
无盲区探测;
[0014]
2、本实用新型通过设置下球体和上球体,通过下球体和上球体组成球形便于携带和使用,声学设备通过声纳探测技术根据回声探测仪的工作原理,利用声线的方向散射信号获取水下地形地貌信息,并生成直观反映水下微地形地貌的图像,同时还可以根据水底回波的强度定性分析水底底质成分;本系统具有精度高、价格低廉、便携等优点。
[0015]
该装置中未涉及部分均与现有技术相同或可采用现有技术加以实现,本实用新型结构科学合理,使用安全方便,为人们提供了很大的帮助。
附图说明
[0016]
附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制,在附图中:
[0017]
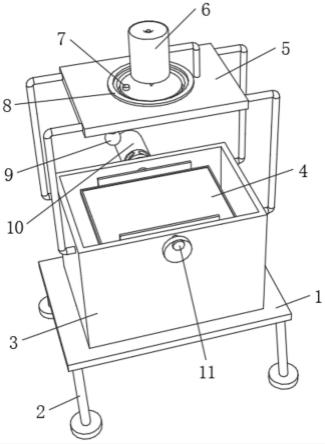
图1为本实用新型提出的一种光声三维立体扫描系统的等轴测结构示意图;
[0018]
图2为本实用新型提出的一种光声三维立体扫描系统的底部结构示意图;
[0019]
图3为本实用新型提出的一种光声三维立体扫描系统的内部结构示意图;
[0020]
图4为本实用新型提出的一种光声三维立体扫描系统的爆炸结构示意图;
[0021]
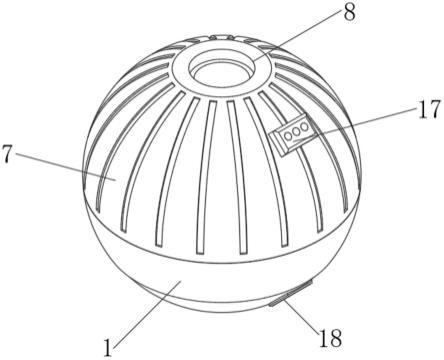
图中:下球体1、连接环2、连接板3、支架4、风机5、出风管6、上球体7、通孔8、光学扫描仪9、声纳测绘仪10、第一cpu11、第二cpu12、存储器13、无线接收器14、gps模块15、电池16、充电接口17、触水开关18、螺纹套19。
具体实施方式
[0022]
下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
[0023]
请参阅图1-4,本实用新型提供一种技术方案:一种光声三维立体扫描系统,包括下球体1,下球体1内侧的顶部固定连接有连接环2,连接环2顶部固定连接有连接板3,连接
板3顶部设置有第一cpu11、第二cpu12、存储器13和无线接收器14,下球体1底部设置有光学扫描仪9和声纳测绘仪10,光学扫描仪9位于下球体1的最底部,光学扫描仪9与第一cpu11电性连接,声纳测绘仪10与第二cpu12电性连接,第一cpu11和第二cpu12均与存储器13电性连接,第一cpu11和第二cpu12通过无线接收器14与计算机显控端通讯连接,下球体1顶部设置有上球体7,通过下球体1底部的光学扫描仪9进行光学点云扫描,发出激光到目标对象的表面,通过光学扫描仪9中的ccd相机接收由目标地物反射的信息,根据记录的入射光和反射光之间的夹角,得出一系列点云数据;同时通过声纳测绘仪10发射波束获取声呐图像,通过不同的物体表面反射声信号的强度和频谱信息来得到数据,所获取的光声数据分别通过第一cpu11和第二cpu12处理后存储在无线接收器14中,再通过存储器13传输到计算机显控端,从而在水下实现360
°
无盲区探测。
[0024]
本实用新型中,优选的,上球体7顶部开设有通孔8,连接板3顶部的中间位置固定连接有支架4,支架4顶部固定连接有风机5,风机5的输出端固定连接有出风管6,出风管6位于通孔8的内侧,通过支架4顶部的风机5对上球体7内部的热量进行抽出,并且通过出风管6排出上球体7的内部。
[0025]
本实用新型中,优选的,通孔8与出风管6间隙配合,将出风管6间隙配合在通孔8的内侧,使内外空气流通,并且防止风机5将热量散热在上球体7的内部,提高了散热效果。
[0026]
本实用新型中,优选的,连接板3顶部设置有gps模块15,结合gps定位系统获取检测位置信息。
[0027]
本实用新型中,优选的,下球体1内部位于连接板3的底部设置有电池16,上球体7上端的外侧设置有充电接口17。
[0028]
本实用新型中,优选的,下球体1外侧设置有触水开关18。
[0029]
本实用新型中,优选的,下球体1顶部固定连接有螺纹套19,下球体1通过螺纹套19与上球体7螺纹连接,便于下球体1和上球体7拆卸。
[0030]
本实用新型的工作原理及使用流程:使用时,通过下球体1外侧的触水开关18启动装置,然后将下球体1放入水中,通过连接板3顶部的无线接收器14与计算机无线通信连接,计算机作为显控模块,用于接收用户输入,发送控制参数、命令、显示、测量的进程、状态,在测量过程中,计算机的主要任务是响应dsp的中断请求,读取dsp处理板上的时间数据,处理成深度信息,与gps定位系统提供的地理位置信息合成,存储在硬盘上,并根据用户的需要实时显示测量成像;通过下球体1底部的光学扫描仪9进行光学点云扫描,发出激光到目标对象的表面,通过光学扫描仪9中的ccd相机接收由目标地物反射的信息,根据记录的入射光和反射光之间的夹角,得出一系列点云数据;同时通过声纳测绘仪10发射波束获取声呐图像,通过不同的物体表面反射声信号的强度和频谱信息来得到数据,所获取的光声数据分别通过第一cpu11和第二cpu12处理后存储在无线接收器14中,再通过存储器13传输到计算机显控端,将采集到的点云数据的原始格式利用recap、recap360转换成autodesk软件可以利用的rcs文件,转换完成之后,在3dmax中实体建模工具下找到点云工具,加载点云,然后利用管理点云数据的box显示和影藏点云数据,方便于对遮挡比较严重的地方进行正确建模;接下来就是在不同显示界面内建模;光学数据站点拼接:获得一个站点数据,与相邻站点进行点云拼接,检查两站点拼接是否良好,略微改动站点位置进行调整,将全部临近站点数据重复以上操作,并进行数据预处理;数据预处理包括对原始数据的滤波降噪处理、数
据简化处理和数据平滑处理,消除由于物理结构和外界环境的影响出现的点云离群点和干扰点;利用折射定律的微分形式,得出关联折射角、入射角与实、虚像点坐标的函数,达到减小由于水流对红外光的折射从而导致传感器测量的误差的目的;将光学扫描所获得的图像与声呐设备最终显示器呈现的数据进行整合和分析;在完成水上三维激光扫描及水下声纳三维扫描的基础上,拟选用opengl环境下完成一系列变化与处理,即可建立水上及水下地形的三维数字高程模型,基于该模型,依据实际情况,对比并优选适用的计算方法;在运行过程中,通过支架4顶部的风机5对上球体7内部的热量进行抽出,并且通过出风管6排出上球体7的内部,上球体7的顶部开设有通孔8,将出风管6间隙配合在通孔8的内侧,使内外空气流通,并且防止风机5将热量散热在上球体7的内部,提高了散热效果,而通过下球体1顶部的螺纹套19将上球体7螺纹装配,进而通过下球体1和上球体7组成球形便于携带和使用,同时便于下球体1和上球体7拆卸。
[0031]
尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。