技术特征:
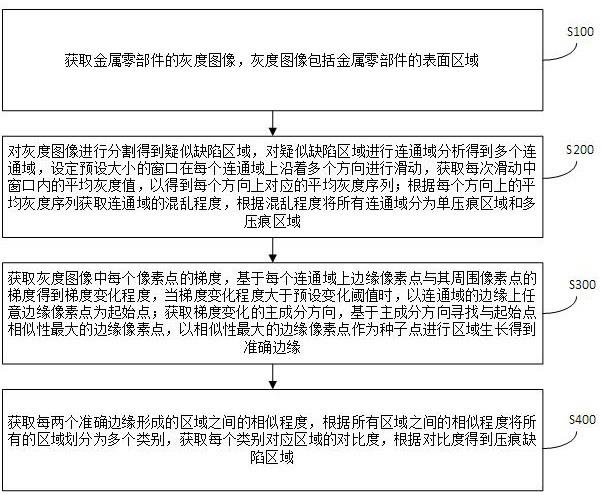
1.一种精密仪器金属零部件缺陷检测方法,其特征在于,该方法包括以下步骤:获取金属零部件的灰度图像,所述灰度图像包括金属零部件的表面区域;对所述灰度图像进行分割得到疑似缺陷区域,对所述疑似缺陷区域进行连通域分析得到多个连通域,设定预设大小的窗口在每个连通域上沿着多个方向进行滑动,获取每次滑动中所述窗口内的平均灰度值,以得到每个方向上对应的平均灰度序列;根据每个方向上的平均灰度序列获取连通域的混乱程度,根据所述混乱程度将所有连通域分为单压痕区域和多压痕区域;获取所述灰度图像中每个像素点的梯度,基于每个连通域上边缘像素点与其周围像素点的梯度得到梯度变化程度,当所述梯度变化程度大于预设变化阈值时,以连通域的边缘上任意边缘像素点为起始点;获取梯度变化的主成分方向,基于所述主成分方向寻找与所述起始点相似性最大的边缘像素点,以相似性最大的边缘像素点作为种子点进行区域生长得到准确边缘;获取每两个准确边缘形成的区域之间的相似程度,根据所有区域之间的相似程度将所有的区域划分为多个类别,获取每个类别对应区域的对比度,根据所述对比度得到压痕缺陷区域。2.根据权利要求1所述的一种精密仪器金属零部件缺陷检测方法,其特征在于,所述根据每个方向上的平均灰度序列获取连通域的混乱程度的步骤,包括:根据所述平均灰度序列获取每个窗口滑动时对应平均灰度值在整个平均灰度序列中的占比,获取连通域中所有滑动次数下窗口的平均灰度值的占比,根据所述占比得到所述混乱程度。3.根据权利要求1所述的一种精密仪器金属零部件缺陷检测方法,其特征在于,所述基于每个连通域上边缘像素点与其周围像素点的梯度得到梯度变化程度的步骤,包括:获取每个边缘像素点的梯度值在连通域的梯度占比,计算所有边缘像素点对应的梯度占比的求和结果,1减去所述求和结果得到梯度变化程度。4.根据权利要求1所述的一种精密仪器金属零部件缺陷检测方法,其特征在于,所述相似性的获取方法为:获取边缘梯度的主成分方向以及起始点,计算起始点周围梯度变化大的像素点的方向与所述主成分方向的差异;根据所述差异以及对应像素点的梯度得到所述相似性。5.根据权利要求1所述的一种精密仪器金属零部件缺陷检测方法,其特征在于,所述获取每两个准确边缘形成的区域之间的相似程度的步骤,包括:获取每个区域中像素点的灰度均值和灰度方差,计算任意两个区域之间像素点的协方差,根据所述协方差、灰度均值以及灰度方差得到相似程度,所述相似程度的计算为:其中,表示第a个区域与第b个区域之间的相似程度;表示第a个区域中的像素点的灰度均值;表示第b个区域中的像素点的灰度均值;表示第a个区域与第b个区域中像素点的协方差;表示第a个区域中像素点的灰度方差;表示第b个区域中像素
点的灰度方差;和表示维持稳定的常数。6.根据权利要求1所述的一种精密仪器金属零部件缺陷检测方法,其特征在于,所述获取每个类别对应区域的对比度的步骤,包括:获取类别对应区域内任意两个相邻像素点之间的灰度值的差值,统计每个灰度值的差值出现的分布概率,根据所述分布概率以及灰度值的差值得到所述对比度。
技术总结
本发明涉及零部件分析检测技术领域,具体涉及一种精密仪器金属零部件缺陷检测方法。该方法包括:获取金属零部件的灰度图像;对灰度图像进行分割并进行连通域分析得到多个连通域,获取连通域的混乱程度,根据混乱程度将所有连通域分为单压痕区域和多压痕区域;获取灰度图像中每个像素点的梯度,进而得到连通域的梯度变化程度,根据梯度变化程度确认起始点;获取梯度变化的主成分方向,基于主成分方向寻找与起始点得到种子点进行区域生长得到准确边缘;获取每两个准确边缘形成的区域之间的相似程度,进而将所有的区域划分为多个类别并获取每个类别对应区域的对比度,根据对比度得到压痕缺陷区域;提高了压痕缺陷区域检测的精度。度。度。
技术研发人员:易俊钰
受保护的技术使用者:南通市通州区精华电器有限公司
技术研发日:2022.10.12
技术公布日:2022/11/8
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。