1.本发明涉及图形识别技术领域,具体涉及一种柴油发动机漏油识别方法。
背景技术:
2.柴油发动机在初步发现漏油故障时,存在发动机组检修点较多、机器内部结构复杂、观察人员经验不足等情况,采用人工识别漏油故障的方法存在较大隐患。现有利用石油荧光检测技术对漏油故障进行识别,并已经通过大量研究成果,验证了石油荧光检测法的有效性。并且利用图像采集装置采集紫外线灯下的发动机荧光图像,就可以在机器视觉的基础上实现自动化检漏。但常规的图像采集装置所采集的荧光图像难以区分渗油、漏油,极大限制了发动机检漏结果的准确性。
技术实现要素:
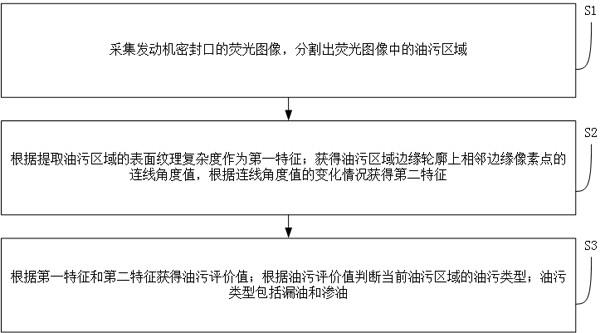
3.为了解决上述技术问题,本发明的目的在于提供一种柴油发动机漏油识别方法,所采用的技术方案具体如下:本发明提出了一种柴油发动机漏油识别方法,所述方法包括:采集发动机密封口的荧光图像,分割出荧光图像中的油污区域;根据提取油污区域的表面纹理复杂度作为第一特征;获得油污区域边缘轮廓上相邻边缘像素点的连线角度值,根据连线角度值的变化情况获得第二特征;根据第一特征和第二特征获得油污评价值;根据油污评价值判断当前油污区域的油污类型;油污类型包括漏油和渗油。
4.进一步地,所述采集发动机密封口的荧光图像包括:通过包含紫外线光源的图像采集装置对发动机密封口处进行拍摄,获得初始荧光图像,将初始荧光图像灰度化处理获得荧光图像。
5.进一步地,所述分割出荧光图像中的油污区域包括:利用阈值分割算法对荧光图像进行分割,获得油污区域。
6.进一步地,所述根据提取油污区域的表面纹理复杂度作为第一特征包括:获取油污区域每个像素点在预设邻域范围内与其存在像素值差异的其他像素值数量;根据表面纹理复杂度公式获得表面纹理复杂度,表面纹理复杂度公式包括:其中,为表面纹理复杂度,为油污区域内像素点的数量,为油污区域内第i个像素点在其邻域范围内与其存在像素值差异的其他像素值数量,为熵值计算公式,为熵值计算时所用的滑窗数量,为第个滑窗内的中心像素点与邻域
方向的灰度差值大小,为第类方差值的概率大小,为以自然常数为底的指数函数。
7.进一步地,所述获得油污区域边缘轮廓上相邻边缘像素点的连线角度值,根据连线角度值的变化情况获得第二特征包括:其中,为第二特征,为边缘轮廓上连线角度值的方差,为油污区域边缘像素点连线角度值分布最多的数量, 为油污区域边缘像素点连线角度值分布最少的数量,为双曲正切函数。
8.进一步地,所述根据第一特征和第二特征获得油污评价值包括:其中,为油污评价值,为表面纹理复杂度,为第二特征。
9.进一步地,所述根据油污评价值判断当前油污区域的油污类型包括:若油污评价值大于预设评价值阈值,则认为对应的油污区域的油污类型为漏油。
10.本发明具有如下有益效果:本发明在现有石油荧光检漏技术的基础上,对油污区域为正常渗油还是故障漏油两种情况进行区分,现有方法为识别发动机密封口附近有无机油液体汇聚,但该方法过于片面,本发明从渗油、漏油各自的特征出发,构建更为全面的发动机检漏模型,提高了人工智能在发动机检漏领域的应用性及可信度,使人工智能的检漏结果更加准确。
附图说明
11.为了更清楚地说明本发明实施例或现有技术中的技术方案和优点,下面将对实施例或现有技术描述中所需要使用的附图作简单的介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它附图。
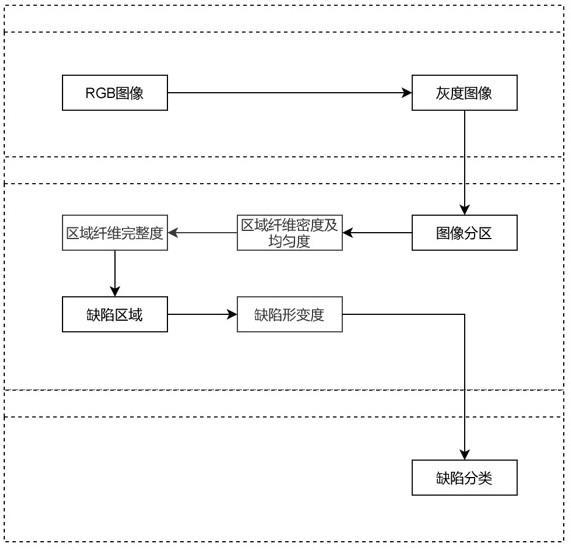
12.图1为本发明一个实施例所提供的一种柴油发动机漏油识别方法流程图。
具体实施方式
13.为了更进一步阐述本发明为达成预定发明目的所采取的技术手段及功效,以下结合附图及较佳实施例,对依据本发明提出的一种柴油发动机漏油识别方法,其具体实施方式、结构、特征及其功效,详细说明如下。在下述说明中,不同的“一个实施例”或“另一个实施例”指的不一定是同一实施例。此外,一或多个实施例中的特定特征、结构或特点可由任何合适形式组合。
14.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。
15.本发明所针对的情景为:
柴油发动机在初步发现漏油故障时,存在发动机组检修点较多、机器内部结构复杂、观察人员经验不足等情况,采用人工识别漏油故障的方法存在较大隐患。现有利用石油荧光检测技术对漏油故障进行识别,并已经通过大量研究成果,验证了石油荧光检测法的有效性。并且利用图像采集装置采集紫外线灯下的发动机荧光图像,就可以在机器视觉的基础上实现自动化检漏。但常规的图像采集装置所采集的荧光图像难以区分渗油、漏油,极大限制了发动机检漏结果的准确性。
16.下面结合附图具体的说明本发明所提供的一种柴油发动机漏油识别方法的具体方案。
17.请参阅图1,其示出了本发明一个实施例提供的一种柴油发动机漏油识别方法流程图,该方法包括:步骤s1:采集发动机密封口的荧光图像,分割出荧光图像中的油污区域。
18.发动机漏油一般指机油泄漏,机油在紫外线光源下会产生荧光,因此通过包含紫外线光源的图像采集装置对发动机密封口处进行拍摄,获得初始荧光图像,将初始荧光图像灰度化处理获得荧光图像。灰度化能够节省计算量,缩短算法运行时间。
19.无论机油还是其他工业油均是从石油原油中提炼而成,也都包含原油最基本的组成物质,即芳香烃族化合物,不同提炼油的烃族化合物含量不同,其荧光光谱均不相同,但对于发动机所用的机油,我们可以将其在不同强度紫外线下所呈现的荧光光谱特征作为先验条件,以所用紫外线强度下的机油光谱特征所得灰度值作为阈值,作为在已捕获并灰度化的发动机图像上将机油所呈的油污区域分割出来。即利用阈值分割算法对荧光图像进行分割,获得油污区域。
20.步骤s2:根据提取油污区域的表面纹理复杂度作为第一特征;获得油污区域边缘轮廓上相邻边缘像素点的连线角度值,根据连线角度值的变化情况获得第二特征。
21.首先漏油和渗油是两个概念,渗油是一种非故障现象,一般表现为:密封处有少量油迹,润滑油并太多的减少,并且在发动机底部看不到有油迹的大面积渗出。而漏油则是一种故障现象,润滑油消耗量异常的增大,会以液体的形式漏到发动机外部。在发动机日常维护时,利用常规自动检漏仅能将机油区域识别,却无法判断究竟是正常渗油还是漏油。
22.发动机从密封口渗油时,每次渗出的机油量极少,因此一般需要长时间的积累,才能在密封口形成一片油污区域,该油污区域是灰尘与机油混杂所形成的污垢,因此油污区域的表面比较粗糙;而漏油则是短时间内大量机油从密封口漏出,液态机油流过发动机表面,短时间内不会掺杂过多灰尘,因此漏油产生的机油区域,其表面依然具备液态特征,比较平滑,所述特征才荧光检测中呈现同样的特征。
23.因此根据提取油污区域的表面纹理复杂度作为第一特征,具体包括:获取油污区域每个像素点在预设邻域范围内与其存在像素值差异的其他像素值数量,在本发明实施例中,创建3*3的窗口对每个像素点进行遍历,统计每个滑窗中心像素点相对于其8邻域的差值数量,即中心像素点与8邻域方向相邻像素点存在最小为0,最大为8个的灰度差值,若整张图像上,每个像素点与邻域都存在较多数量的灰度差值,那么我们可以认为该油污区域表面的纹理较多。但仅计算纹理数量并未计算具体的灰度差值大小,还不足以说明油污区域表面粗糙,因此我们计算每个滑窗内部的灰度方差,并将所有的滑窗所计算的灰度方差值进行混乱度评估,即可得到油污区域表面纹理的复杂度,根据表面
纹理复杂度公式获得表面纹理复杂度,表面纹理复杂度公式包括:其中,为表面纹理复杂度,为油污区域内像素点的数量,为油污区域内第i个像素点在其邻域范围内与其存在像素值差异的其他像素值数量,为熵值计算公式,为熵值计算时所用的滑窗数量,为第个滑窗内的中心像素点与邻域方向的灰度差值大小,为第类方差值的概率大小,为以自然常数为底的指数函数。
24.在表面纹理复杂度公式中,代表将整个油污区域上所有像素点灰度差值数量累加求均,得到平均每个像素点与邻域像素点存在灰度差值的数量,该值在0-8内越大则代表纹理数量越多。在进行熵值计算时,选用3*3的滑窗进行处理,实际上以整个油污区域每个像素点都为窗口中心像素点,即m=n。熵值越大,则代表油污区域中的纹理越复杂,越符合渗油区域与灰尘大量混杂所形成油垢的粗糙表面特征。利用指数函数对进行反比例归一化,越大,则在0-1之间越小,相反越大,则在0-1之间越大,则越符合漏油故障发生时机油未混合大量灰尘,表面仍具有光滑性的特征。为识别油污区域为漏油故障的第一特征。其中v代表任意一个3*3的滑窗,m代表所有窗口的数量,代表第v个滑窗内的灰度值方差,代表窗口内灰度方差值为在整个图像上所有窗口的方差值集合中出现的次数,代表方差值为在图像上所有窗口的方差值集合中所出现的概率。
25.由于渗油区域的机油蔓延时间长、速度慢,因此其边缘会呈现向着四面八方延伸,而漏油故障则蔓延速度快,存在明显油液流动的痕迹,因此漏油故障的机油区域边缘会有清晰的延伸方向,即向着油液流动方向,边缘在流动时向其他方向的延伸趋势较小,更为平滑。
26.因此对油污区域进行canny算子检测,得到油污区域的边缘轮廓,正如上述逻辑所说,渗油时油液较少,不呈现流动趋势,而是蔓延趋势,因此其向四面八方都会存在边缘延伸趋势。而漏油则有明显的油液流动趋势,其边缘延伸方向会向着某一方向,而其余方向则存在较小的蔓延趋势。
27.我们计算已得油污区域的相邻边缘像素点的连线角度值,得到所有边缘像素点的连线角度值,在像素图像上,相邻像素点的值仅有0
°
、45
°
、90
°
、135
°
、180
°
、225
°
、270
°
、
315
°
8个,若机油从密封口渗出,则机油在每个角度方向上的蔓延概率都应该相似,若为漏油故障,则机油从密封口漏出后,油液会向着某个方向快速流去,因此获得油污区域边缘轮廓上相邻边缘像素点的连线角度值,根据连线角度值的变化情况获得第二特征包括:其中,为第二特征,为边缘轮廓上连线角度值的方差,为油污区域边缘像素点连线角度值分布最多的数量, 为油污区域边缘像素点连线角度值分布最少的数量,为双曲正切函数。
28.在第二特征公式中,代表油污区域边缘像素点连线角度值的方差,该方差值越大则边缘的延伸方向越不均匀,代表油污区域边缘像素点连线角度值分布最多的数量,减去油污区域边缘像素点连线角度值分布最少的数量,得到8个边缘像素点连线角度的分布数量极差,该极差值越大,越代表边缘向着某个方向存在较大程度的延伸趋势,为两者相乘得到油污区域边缘流动趋势评价值,为利用双曲正切函数对结果进行正比例归一化,使其在0-1之间取值。油污区域越符合漏油故障机油油液流动特征,则在0-1之间的取值越大。则作为识别油污区域为漏油故障的第二特征。
29.步骤s3:根据第一特征和第二特征获得油污评价值;根据油污评价值判断当前油污区域的油污类型;油污类型包括漏油和渗油。
30.根据第一特征和第二特征获得油污评价值包括:其中,为油污评价值,为表面纹理复杂度,为第二特征。将第一特征和第二特征进行l2范数计算整合,获得油污评价值。
31.根据油污评价值的大小即可判断当前油污区域的油污类型,即油污评价值越大,则油污区域越可能为漏油,具体包括:若油污评价值大于预设评价值阈值,则认为对应的油污区域的油污类型为漏油。在本发明实施例中,评价值阈值设置为0.65。
32.需要说明的是:上述本发明实施例先后顺序仅仅为了描述,不代表实施例的优劣。在附图中描绘的过程不一定要求示出的特定顺序或者连续顺序才能实现期望的结果。在某些实施方式中,多任务处理和并行处理也是可以的或者可能是有利的。
33.本说明书中的各个实施例均采用递进的方式描述,各个实施例之间相同相似的部分互相参见即可,每个实施例重点说明的都是与其他实施例的不同之处。
34.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和
原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。