1.本发明涉及高压变频器,尤其涉及一种四象限功率单元的控制方法。
背景技术:
2.级联型四象限高压变频器是高压电机变频驱动系统的关键设备,广泛应用于10kv和6kv高压大功率电机的节能运行控制和工艺调速控制。级联型高压变频器主要由移相变压器和3n个功率单元构成,每n个功率单元串联在一起,构成一相变频变压电源, 3n个功率单元则可组成三个单相变频变压电源,将这三个单相变频变压电源连接成星型,就构成了三相输出的变频变压电源,因单元级联而形成了高电压输出能力,可用于控制高压电机运行。
3.四象限功率单元在电机发电状态,把单元母线过高的电压进行pwm整流,经移相变压器回馈到电网,保持四象限变频器工作稳定。
4.四象限功率单元pwm整流模块工作在电动状态时,对单元交流输入进行主动功率因数调整,使交流输入功率因素接近于1。
5.高压变频器三相输出,每相由多个种四象限功率单元串联,只要带载就有可能出现三相不平衡,此时三相单元的母线电压有可能出现不一致,四象限功率单元的输入来自多输出绕组的移相变压器,多输出绕组共用一个铁芯,也会出现相互干扰的不稳定现象;母线电压稳定是保证运行稳定和运行安全的重要保障,母线电压太低输出功率不达标,母线电压过高会产生炸机风险,母线电压剧烈波动可导致四象限功率单元运行不稳定。
技术实现要素:
6.本发明要解决的技术问题是提供一种功率单元母线电压能稳定在安全区间的四象限功率单元的控制方法。
7.为了解决上述技术问题,本发明采用的技术方案是,一种四象限功率单元的控制方法,四象限功率单元包括pwm整流模块,逆变模块和控制电路,pwm整流模块具有三相交流输入端,与电网的三相交流电源连接,把接收到的交流电转换为直流电;逆变模块具有交流输出端,通过直流母线与pwm整流模块相连接,用于将直流电转换为频率可调的交流电,驱动与交流输出端连接的电机;控制电路分别与pwm整流模块和逆变模块相连,用于控制pwm整流模块和逆变模块,控制方法包括以下控制步骤:101)电动状态:pwm整流模块对电网的三相电压进行pwm调制,pwm整流模块的svpwm矢量角动态滞后于电网矢量角,电网输入功率因数接近于1,直流母线电压处于稳压状态,完成主动功率因素补偿,实现能量从电网到电机的正向流动;102)馈电状态:当逆变模块和电机运行在制动状态,直流母线电压升高时,调整pwm整流模块的svpwm矢量角使其动态超前于电网矢量角,运行在回馈状态,将母线直流电调制成三相交流电并入电网,稳定母线电压,实现能量从电机到电网的反向流动。
8.以上所述的四象限功率单元的控制方法,包括以下控制步骤:
201)实时采集电网的三相交流电压,通过虚拟磁链估算,得到电网矢量角;202)实时采集输入pwm整流模块的三相交流电流,通过αβ/dq变换,得到可控矢量,通过pi调整器,使直流母线电压趋于稳定;203)实时检测直流母线电压,将直流母线电压的采样值与直流母线的设定值进行比较;204)当直流母线电压下降到设定的下限值时,通过空间矢量转换,使pwm整流模块的矢量角动态滞后于电网矢量角,使直流母线电压趋向于稳定在设定的下限值;205)当直流母线电压上升到设定的上限值时,通过空间矢量转换,使pwm整流模块的矢量角动态超前于电网矢量角,使直流母线电压趋向于稳定在设定的上限值。
9.以上所述的四象限功率单元的控制方法,包括以下控制步骤:控制电路包括控制器、三相交流电压采样电路、三相交流电流采样电路和直流母线电压采样电路,并包括以下控制步骤:301)三相交流电压采样信号经第一信号处理单元处理分解出电网电压矢量角、d q同步旋转坐标系的直轴电压分量和d q同步旋转坐标系的交轴电压分量;302)三相交流电流采样信号经第二信号处理单元处理分解出d q同步旋转坐标系的直轴电流分量和d q同步旋转坐标系的交轴电流分量;303)电网电压矢量角输入锁相环模块,锁相环模块输出锁相的电网电压矢量角;304)直流母线电压采样值与直流母线电压设定值做差运算和pi运算得到d q同步旋转坐标系的直轴电流基准和交轴电流基准;305)直轴电流分量id与直轴电流基准做差运算和pi运算得到直轴电压补偿值,交轴电流分量iq与交轴电流基准做差运算和pi运算得到交轴电压补偿值;306)直轴电压分量ud与直轴电压补偿值求和后得到直轴电压修正值,交轴电压分量uq与交轴电压补偿值求和后得到交轴电压修正值;307)锁相的电网电压矢量角θo、直轴电压修正值和交轴电压修正值分别输入同步旋转坐标系反变换模块,直轴电压修正值和交轴电压修正值由dq同步旋转坐标系的数据变换成αβ静止坐标系数据;输出αβ静止坐标系的α轴电压分量和β轴电压分量;308)αβ静止坐标系的α轴电压分量和β轴电压分量输入pwm数据生成模块,生成控制pwm整流模块的pwm驱动信号。
10.以上所述的四象限功率单元的控制方法,所述的控制器由dsp、mcu和cpld组合构成,dsp作为主控,负责重要数据运算;mcu负责数据采集以及通讯;cpld负责pwm运行线路通断,故障保护快速联动,开关逻辑处理和io口扩展。
11.本发明能够让功率单元工作时母线电压稳定在安全区间,保持四象限功率单元运行稳定。
附图说明
12.下面结合附图和具体实施方式对本发明作进一步详细的说明。
13.图1是本发明实施例四象限功率单元主电路的原理框图。
14.图2是本发明实施例四象限功率单元的控制原理图。
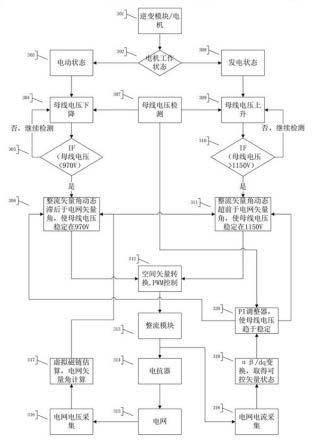
15.图3是本发明实施例四象限功率单元的控制方法的流程图。
16.图4是本发明实施例同步旋转坐标系的示意图。
17.图5是本发明实施例双二阶广义积分pi锁相环的运行效果图。
具体实施方式
18.本发明实施例四象限功率单元控制方法的原理如图1至图5所示,四象限功率单元包括pwm整流模块(pwm三相igbt整流桥)116,逆变模块119和控制电路,pwm整流模块具有三相交流输入端,通过电抗器117与电网110的三相交流电源、移相变压器的输出端连接,把接收到的交流电转换为直流电;逆变模块具有交流输出端,通过直流母线与pwm整流模块相连接,用于将直流电转换为频率可调的交流电,驱动与交流输出端连接的电机;直流母线上接有母线电容118;控制电路分别与pwm整流模块和逆变模块相连,用于控制pwm整流模块和逆变模块。pwm整流模块与逆变模块之间通用串口在单元内通信,20ms一次,逆变模块模块收到数据后把pwm整流模块的数据按照30微秒的帧周期高速刷新,上传给控制电路。
19.控制方法主要包括以下控制步骤:1)电动状态:pwm整流模块对电网的三相电压进行pwm调制,pwm整流模块的svpwm矢量角动态滞后于电网矢量角,电网输入功率因数接近于1,直流母线电压处于稳压状态,完成主动功率因素补偿,实现能量从电网到电机的正向流动;2)馈电状态:当逆变模块和电机运行在制动状态,直流母线电压升高时,调整pwm整流模块的svpwm矢量角使其动态超前于电网矢量角,运行在回馈状态,将母线直流电调制成三相交流电并入电网,稳定母线电压,实现能量从电机到电网的反向流动。
20.本发明实施例四象限功率单元控制方法的流程如图3所示,包括以下控制步骤:1)如步骤316和317,实时采集电网的三相交流电压,通过虚拟磁链估算,得到电网矢量角;运算过程包括电网锁相环,提供稳定的电网相位,即使电网电压有剧烈波动,锁相环可以保持稳定;2)如步骤318、319和320,从电抗器与pwm整流模块之间实时采集输入pwm整流模块的三相交流电流,通过αβ/dq变换,得到可控矢量,通过pi调整器,使直流母线电压趋于稳定;3)如步骤307,304、305、309和310,实时检测直流母线电压,将直流母线电压的采样值与直流母线的设定值进行比较;4)在电机的电动状态下,通常电机轻载的时候母线电压降低较小,重载的时候直流母线电压会下降到6脉波整流的基线;如步骤306和312当直流母线电压下降到设定的下限值970v时,通过空间矢量转换和pi调整器,使pwm整流模块的矢量角动态滞后于电网矢量角,使直流母线电压趋向于稳定在设定的下限值970v,且电网的电流趋于稳定;5)在电机的发电状态下,电机在减速、飞车或重启等运行状态,电机能量会反向流动,生成的电能通过逆变模块向母线电容充电;如步骤311和312,当直流母线电压上升到设定的上限值1150v时,通过空间矢量转换和pi调整器,使pwm整流模块的矢量角动态超前于电网矢量角,使直流母线电压趋向于稳定在设定的上限值1150v,且电网的电流趋于稳定。
21.本发明实施例四象限功率单元控制原理如图2所示:控制电路包括控制器、三相交流电压采样电路、三相交流电流采样电路和直流母线电压采样电路,并包括以下控制步骤:
1) 移相变压器输出的三相交流电压ua、ub和uc经三相交流电压采样电路获取的采样信号由第一信号处理单元111运算,分解出电网电压矢量角θ、d q同步旋转坐标系的直轴电压分量ud和d q同步旋转坐标系的交轴电压分量uq;2) 三相交流电流采样电路对电抗器117与pwm整流模块116之间的电流ia、ib和ic采样,三相交流电流采样信号经第二信号处理单元112处理分解出d q同步旋转坐标系的直轴电流分量id和d q同步旋转坐标系的交轴电流分量iq;直轴电压分量ud、交轴电压分量uq、直轴电流分量id和交轴电流分量iq为可控矢量,便于下一步运算;3)电网电压矢量角θ输入锁相环模块,锁相环模块输出锁相的电网电压矢量角θo;4)直流母线电压采样值vdc与直流母线电压设定值(vdc设定)做差运算和pi运算得到d q同步旋转坐标系的直轴电流基准(id_基准)和交轴电流基准(iq_基准);5)直轴电流分量id与直轴电流基准(id_基准)做差运算和pi运算得到直轴电压补偿值,交轴电流分量iq与交轴电流基准(iq_基准)做差运算和pi运算得到交轴电压补偿值;6)直轴电压分量ud与直轴电压补偿值求和后得到直轴电压修正值,交轴电压分量uq与交轴电压补偿值求和后得到交轴电压修正值;7)锁相的电网电压矢量角θo、直轴电压修正值和交轴电压修正值分别输入同步旋转坐标系反变换模块114,直轴电压修正值和交轴电压修正值由dq同步旋转坐标系的数据变换成αβ静止坐标系数据;输出αβ静止坐标系的α轴电压分量和β轴电压分量;8)αβ静止坐标系的α轴电压分量和β轴电压分量输入pwm数据生成模块115,生成控制pwm整流模块116的pwm驱动信号。
22.本发明以上实施例的控制方法通过pi调节,使母线电压,电网电流趋于稳定;pi调整器使pwm整流的矢量角动态超前或滞后电网矢量角,使得母线电压稳定在目标电压值附近,并且不管在电动状态还是发电状态电网工作电流趋于稳定。
23.控制器由dsp、mcu和cpld组合构成,dsp作为主控,负责重要数据运算;mcu负责数据采集以及通讯;cpld负责pwm运行线路通断,故障保护快速联动,开关逻辑处理和io口扩展。
24.锁相环模块为基于软硬件结合的双二阶广义积分pi锁相环,即基于同步旋转坐标系和二阶广义积分pi锁相环,可以在电网电压不平衡、电压跌落、频率突变或多次谐波的情况下准确获取电网电压正序分量的频率和相位信息。
25.以上的锁相环满足以下公式条件:以上的锁相环满足以下公式条件:
当角度θ=θ2=θo,角频率ω1=ω2,相位差φerr=0,旋转坐标直轴ud=u,旋转坐标交轴uq=0,此时锁相成功。
26.其中,uα是αβ静止坐标系的α轴电压分量;uβ是αβ静止坐标系的β轴电压分量; ud是d q同步旋转坐标系的直轴电压分量;uq是d q同步旋转坐标系的交轴电压分量;θ是输入电网电压矢量角θ;θ2是软件同步旋转坐标系矢量角,即d q同步旋转坐标系的初始角;θo是锁相的电网电压矢量角;ω1是电网角频率;ω2是软件同步旋转坐标系角频率;ω2是dsp 反正切相关软件模块计算αβ软件同步旋转坐标系θ2角,其单位时间内走过的角度得到的角频率。通过调整φerr使ω2接近或等于ω1。
27.φerr是输入电网电压矢量角θ与同步旋转坐标系矢量角输入电网电压矢量角θ2的角度误差;u是电网的相电压,在运算过程中转换成ua、ub、uc,然后转换成uα、uβ,再转换成ud、uq;即由三相电压的三个变量最后转换成容易运算的两种变量。
28.如图4所示,在锁相环d q同步旋转坐标系中,直轴分量与交轴分量的矢量夹角是θo是三相交流电锁相后输出的矢量夹角;通过公式变换成d轴分量和q轴分量可以便于计算和处理; d表达电压的大小,d越大表示反电动势越大,此时出力装置和目标设备越达到能量平衡,此时出力相互抵消;反之偏离平衡状态;q表达出力的大小通常用uq/iq表示;q值为正时正转发力,q值为负时为反转发力;q值越大d值就会相应的缩小,进入加速或者减速状态,反之则进入平衡状态。
29.如图5所示,电网电压在稳定工况转到恶劣工况,锁相能环保持稳定,使输出pwm整流电压波形保持稳定,同时使三相pwm整流电流平衡稳定。图5中,201:intput uabc是输入电网电压波形;202:ud和uq是同步旋转坐标系ud,uq在时间轴上的大小;203:输出监控的矢量角θo 时间轴;204:φerr是锁相误差时间轴;205:ontput uabc是输出到电网的电压波形。
30.本发明以上实施例的四象限功率单元的控制方法通过软硬件结合的双二阶广义积分pi锁相环在稳定性和瞬态响应的动态变换中达到了平衡,使母线电压稳定在上限和下限之间,且能快速响应,以保持四象限功率单元的安全运行。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。