1.本发明涉及森林防火监控领域,具体涉及森林防火烟雾报警抗干扰处理方法。
背景技术:
2.森林防火监控技术,一般是采用视频监控对每帧画面进行识别,若识别出存在有烟雾区域,则进行报警输出,从而达到非明火预警目的。
3.一般在布置的监控区域内,还存在个别的住户,一般森林防火监控技术又多数应用于山区,在山区中,依然存在零散的住户,这些住户往往会使用木柴进行取暖、做饭等生活活动。因此容易导致在监控画面中出现生活烟雾区域,这些生活烟雾区域又往往会被识别出来,导致频繁的报警。一般对于这类报警,现有的系统会直接显示到画面中,由用户进行人工判定后,由用户作出火灾或非火灾的选项,从而关闭报警状态。因此,这会导致用户频繁的需要进行选择来关闭报警状态。因此,如何实现对这种现象的抗干扰处理,是本技术所需要解决的技术问题。
技术实现要素:
4.本发明的目的在于提供森林防火烟雾报警抗干扰处理方法,该方法可以在保障不漏报警的情况下对生活烟雾进行抗干扰的处理。
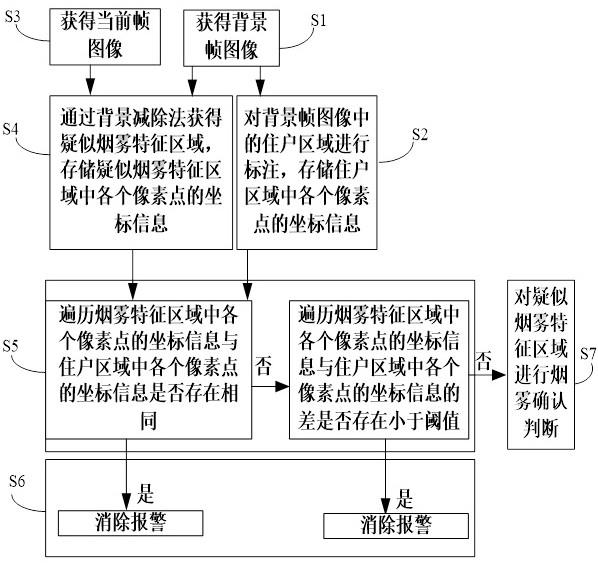
5.一方面,森林防火烟雾报警抗干扰处理方法,包括以下步骤:s1.获得背景帧图像;s2.对背景帧图像中的住户区域进行标注,存储住户区域中各个像素点的坐标信息;s3.获得当前帧图像;s4.用当前帧图像和背景帧图像进行背景减除法处理获得疑似烟雾特征区域,存储疑似烟雾特征区域中各个像素点的坐标信息;s5.判断疑似烟雾特征区域中各个像素点的坐标信息与存储住户区域中各个像素点的坐标信息是否符合相近关系,若符合相近关系,转s6,若不符合相近关系,转s7;s6.不对当前疑似烟雾特征区域进行报警显示、并消除报警;s7.执行烟雾确认判断,烟雾确认判断为是时,对当前疑似烟雾特征区域进行报警显示,烟雾确认判断为否时,转s6。
6.进一步的,判断疑似烟雾特征区域中各个像素点的坐标信息与存储住户区域中各个像素点的坐标信息是否符合相近关系的具体过程为过程1或过程2或过程3;过程1:遍历疑似烟雾特征区域中各个像素点的坐标信息与住户区域中各个像素点的坐标信息是否存在相同,存在相同则符合相近关系,不存在相同,则不符合相近关系;过程2:遍历疑似烟雾特征区域中各个像素点的坐标信息与住户区域中各个像素点的坐标信息的差是否存在小于阈值,存在小于阈值则符合相近关系,不存在小于阈值,则不符合相近关系;
过程3包括:过程31和过程32,过程31:遍历疑似烟雾特征区域中各个像素点的坐标信息与住户区域中各个像素点的坐标信息是否存在相同,存在相同则符合相近关系,不存在相同,则不符合相近关系,并转过程32;过程32:遍历疑似烟雾特征区域中各个像素点的坐标信息与住户区域中各个像素点的坐标信息的差是否存在小于阈值,存在小于阈值则符合相近关系,不存在小于阈值,则不符合相近关系。
7.进一步的,遍历疑似烟雾特征区域中各个像素点的坐标信息与住户区域中各个像素点的坐标信息是否存在相同的算法为:将雾特征区域中各个像素点的坐标信息作为集合a1的元素,将住户区域中各个像素点的坐标信息作为集合a2的元素,计算集合a1和集合a2是否存在交集,若存在交集则存在相同,若不存在交集则不存在相同。
8.进一步的,背景帧图像、当前帧图像均是基于图像左上角为原点建立以像素为单位的直接坐标系u-v,像素的横坐标u与纵坐标v分别是在其图像数组中所在的列数与所在行数,遍历疑似烟雾特征区域中各个像素点的坐标信息与住户区域中各个像素点的坐标信息的差是否存在小于阈值的算法为:将疑似烟雾特征区域中各个像素点的坐标信息和住户区域中各个像素点的坐标信息规整为整数,疑似烟雾特征区域中各个像素点的坐标信息和住户区域中各个像素点的坐标信息分别表示为d(u,v)、d
‘
(u
‘
,v
‘
),d(u,v)、d
‘
(u
‘
,v
‘
)规整为整数后,所得整数分别为d=uv、d
‘
=u
‘v‘
,疑似烟雾特征区域中各个像素点的坐标信息与住户区域中各个像素点的坐标信息的差表示为:c=|d-d
‘
|=|uv-u
‘v‘
|。
9.进一步的,所述阈值为:1至5中的任意一个整数。
10.进一步的,背景帧图像、当前帧图像均是基于图像左上角为原点建立以像素为单位的直接坐标系u-v,像素的横坐标u与纵坐标v分别是在其图像数组中所在的列数与所在行数,遍历疑似烟雾特征区域中各个像素点的坐标信息与住户区域中各个像素点的坐标信息的差是否存在小于阈值的算法为:将疑似烟雾特征区域中各个像素点的坐标信息和住户区域中各个像素点的坐标信息规整为小数,疑似烟雾特征区域中各个像素点的坐标信息和住户区域中各个像素点的坐标信息分别表示为d(u,v)、d
‘
(u
‘
,v
‘
),d(u,v)、d
‘
(u
‘
,v
‘
)规整为小数后,所得小数分别为d=u.v、d
‘
=u
‘
.v
‘
、其中列数:u、u
‘
被规整为小数点前的整数部分,行数:v、v
‘
被规整为小数点后的小数部分;疑似烟雾特征区域中各个像素点的坐标信息与住户区域中各个像素点的坐标信息的差表示为:c=|d-d
‘
|=|u.v-u
‘
.v
‘
|。
11.进一步的,所述阈值为:0.1至0.5中的任意一个小数。
12.进一步的,背景帧图像、当前帧图像为森林防火监控视频中同一视角下的图像,背景帧图像为人工标定没有烟雾的图像。
13.进一步的,所述烟雾确认判断包括:颜色特征检验确定法或/和形态特征检验确认法或/和运动特征检测确认法。
14.另一方面,森林防火烟雾报警抗干扰处理装置,包括:存储器;一个或多个处理器;及一个或多个模块,存在存储器中并被配置成由所述一个或多个处理器执行,所述一个或多个模块包括:获得背景帧图像的模块;对背景帧图像中的住户区域进行标注,存储住户区域中各个像素点的坐标信息的模块;获得当前帧图像的模块;用当前帧图像和背景帧图像进行背景减除法处理获得疑似烟雾特征区域,存储疑似烟雾特征区域中各个像素点的坐标信息的模块;判断疑似烟雾特征区域中各个像素点的坐标信息与存储住户区域中各个像素点的坐标信息是否符合相近关系的模块;符合相近关系时,不对当前疑似烟雾特征区域进行报警显示、并消除报警的模块;不符合相近关系时,执行烟雾确认判断,烟雾确认判断为否时,不对当前疑似烟雾特征区域进行报警显示、并消除报警的模块;不符合相近关系时,执行烟雾确认判断,烟雾确认判断为是时,对当前疑似烟雾特征区域进行报警显示的模块。
15.本发明的有益效果为:1.本发明对背景帧图像中的住户区域进行标记,并采用背景减除法处理获得疑似烟雾特征区域,然后对住户区域和疑似烟雾特征区域进行分析,从而进行抗干扰处理,最终排除与住户区域相关的干扰的疑似烟雾特征区域,达到去除生活烟雾的干扰的目的;2.本发明采用特殊的核心算法,包括坐标信息是否存在相同的坐标相同算法、坐标信息的差是否存在小于阈值的坐标临近算法,从而实现对疑似烟雾特征区域与住户区域的关联性分析,从而实现去除生活烟雾的干扰的同时不会造成漏报的目的。
附图说明
16.图1为本发明的流程示意图。
17.图2为住户区域与疑似烟雾特征区域在同一图像中的示意图。
18.图3为住户区域、疑似烟雾特征区域中的像素点的坐标信息的存在相同时的示意图。
19.图4为住户区域、疑似烟雾特征区域中的像素点的坐标信息的差小于阈值时的示意图 。
20.图5为住户区域、疑似烟雾特征区域中的像素点的坐标信息的差大于阈值时的一种示意图 。
21.图6为住户区域、疑似烟雾特征区域中的像素点的坐标信息的差大于阈值时的另一种示意图。
具体实施方式
22.下面结合实施例及附图,对本发明作进一步的详细说明,但本发明的实施方式不限于此。
23.实施例1如图1-图6所示,森林防火烟雾报警抗干扰处理方法,包括以下步骤:s1.获得背景帧图像;s2.对背景帧图像中的住户区域进行标注,存储住户区域中各个像素点的坐标信息;s3.获得当前帧图像;s4.用当前帧图像和背景帧图像进行背景减除法处理获得疑似烟雾特征区域,存储疑似烟雾特征区域中各个像素点的坐标信息;s5.判断疑似烟雾特征区域中各个像素点的坐标信息与存储住户区域中各个像素点的坐标信息是否符合相近关系,若符合相近关系,转s6,若不符合相近关系,转s7;s6.不对当前疑似烟雾特征区域进行报警显示、并消除报警;s7.执行烟雾确认判断,烟雾确认判断为是时,对当前疑似烟雾特征区域进行报警显示,烟雾确认判断为否时,转s6。
24.本实施例采用坐标相近关联思想对干扰性的生活烟雾进行判定,从而实现抗干扰的目的。具体的,先采用标注的方式对背景帧图像中属于住户的区域进行标注,所标注的住户区域中存在多个像素点,并以单个像素点为最小基本单位,每个像素点在图像中的坐标信息被记录保存;在获得当前帧图像时,采用常规的背景减除法获得疑似烟雾特征区域,同样的,疑似烟雾特征区域中存在多个像素点,并以单个像素点为最小基本单位,每个像素点在图像中的坐标信息被记录保存;在获得像素点的坐标信息后,则执行相近关系符合分析,相近关系一般的情形有像素点的坐标相同或像素点的坐标的差较小符合相邻特性,因此可以认为这种情形下,可以判定当前的疑似烟雾特征区域为住户生活所造成的生活烟雾。需要进行消除报警。
25.本发明借助了标注区域的坐标与识别出的烟雾区域的坐标进行分析,从而实现对生活化的烟雾进行识别,从而达到消除误报的目的,具有计算量小,误差小的特性。
26.具体的,如何实现相近关系符合分析,本实施例提供了以下三种方式,第三种方式是前2种方式的复合方法。利用上述方法可以有效的识别生活烟雾。
27.进一步的,判断疑似烟雾特征区域中各个像素点的坐标信息与存储住户区域中各个像素点的坐标信息是否符合相近关系的具体过程为过程1或过程2或过程3;过程1:遍历疑似烟雾特征区域中各个像素点的坐标信息与住户区域中各个像素点的坐标信息是否存在相同,存在相同则符合相近关系,不存在相同,则不符合相近关系;过程2:遍历疑似烟雾特征区域中各个像素点的坐标信息与住户区域中各个像素点的坐标信息的差是否存在小于阈值,存在小于阈值则符合相近关系,不存在小于阈值,则不符合相近关系;过程3包括:过程31和过程32,过程31:遍历烟雾特征区域中各个像素点的坐标信息与住户区域中各个像素点的
坐标信息是否存在相同,存在相同则符合相近关系,不存在相同,则不符合相近关系,并转过程32;过程32:遍历疑似烟雾特征区域中各个像素点的坐标信息与住户区域中各个像素点的坐标信息的差是否存在小于阈值,存在小于阈值则符合相近关系,不存在小于阈值,则不符合相近关系。
28.进一步的,遍历疑似烟雾特征区域中各个像素点的坐标信息与住户区域中各个像素点的坐标信息是否存在相同的算法为:如图2所示,图2被划分为天空区域、高山区域、丘陵区域、农田区域,图中的住户分布在丘陵区域内,在图2中标记了住户区域和疑似烟雾特征区,住户区域和疑似烟雾特征区分别各自包含多个像素点,一个像素点就是图2中的一个像素单元。
29.如图3所示,将疑似雾特征区域中各个像素点的坐标信息作为集合a1的元素,将住户区域中各个像素点的坐标信息作为集合a2的元素,计算集合a1和集合a2是否存在交集,若存在交集则存在相同,若不存在交集则不存在相同。
30.参见附图3所示,疑似烟雾特征区域共有9个像素点,其坐标分别为:(5.7),(6.5),(6.6),(6.7),(7.4),(7.5),(7.6),(8.4),(8.5),住户区域共有4个像素点,其坐标分别为:(5.7),(6.7),(5.8),(6.8);这些坐标分别组成集合a1、集合a2,2个集合的交集的元素分别有:(5.7),(6.7);因此其符合相近关系中的相同关系,疑似烟雾特征区域可以视为生活烟雾,因此消除报警。
31.需要特殊说明的是,如图4、图5、图6所示,一般烟雾存在飘动特性,因此,在所捕捉到的图像中,多数烟雾区域与生活区域在图像中存在间隙,因此,采用相同关系并不能完全消除误报,而在这种存在间隙的离散情况下,如何有效识别出疑似烟雾特征区域为生活烟雾是较为难处理的。因此,如何提高消除误报的准确度,从而避免漏报,是本发明较为难以克服的技术问题。如图4-图6所示,图4中的疑似烟雾特征区域为生活烟雾,图5、图6中的疑似烟雾特征区域实际为非生活烟雾,这些烟雾区域距离住户区域较远。因此,需要一种算法可以既能有效识别出生活烟雾、又能避免将非生活烟雾识别为生活烟雾造成漏报警。
32.进一步的,背景帧图像、当前帧图像均是基于图像左上角为原点建立以像素为单位的直接坐标系u-v,像素的横坐标u与纵坐标v分别是在其图像数组中所在的列数与所在行数,遍历疑似烟雾特征区域中各个像素点的坐标信息与住户区域中各个像素点的坐标信息的差是否存在小于阈值的算法为:将疑似烟雾特征区域中各个像素点的坐标信息和住户区域中各个像素点的坐标信息规整为整数,疑似烟雾特征区域中各个像素点的坐标信息和住户区域中各个像素点的坐标信息分别表示为d(u,v)、d
‘
(u
‘
,v
‘
),d(u,v)、d
‘
(u
‘
,v
‘
)规整为整数后,所得整数分别为d=uv、d
‘
=u
‘v‘
;其中列数:u、u
‘
可以被规整为十位,行数:v、v
‘
可以被规整为个位;其中列数:u、u
‘
可以被规整为十位以上的位数,行数:v、v
‘
可以被规整为个位以上的位数;疑似烟雾特征区域中各个像素点的坐标信息与住户区域中各个像素点的坐标信
息的差表示为:c=|d-d
‘
|=|uv-u
‘v‘
|。
33.如图4所示,疑似烟雾特征区域存在9个像素点,其坐标分别为:(5.5),(6.3),(6.4),(6.5),(7.2),(7.3),(7.4),(8.2),(8.3),住户区域共有4个像素点,其坐标分别为:(5.7),(6.7),(5.8),(6.8);采用本发明的上述算法,其中疑似烟雾特征区域的9个像素点的坐标被规整为55,63,64,65,72,73,74,82,83,住户区域共有4个像素点,其坐标分别为:57,67,58,68;可以计算其差最小有:|55-57|=2,当阈值为5时,则差存在小于阈值的符合情形,可以判定该疑似烟雾特征区域或生活烟雾,因此执行消除报警。
34.如图5所示,疑似烟雾特征区域存在9个像素点,其坐标分别为:(8.5),(9.3),(9.4),(9.5),(10.2),(10.3),(10.4),(11.2),(11.3),住户区域共有4个像素点,其坐标分别为:(5.7),(6.7),(5.8),(6.8);采用本发明的上述算法,其中疑似烟雾特征区域的9个像素点的坐标被规整为85,93,94,95,102,103,104,112,113,住户区域共有4个像素点,其坐标分别为:57,67,58,68;可以计算其差最小有:|85-68|=17,当阈值为5时,则差不存在小于阈值的符合情形,可以判定该疑似烟雾特征区域不为生活烟雾,因此执行报警。
35.如图6所示,疑似烟雾特征区域存在9个像素点,其坐标分别为:(1.5),(2.3),(2.4),(2.5),(3.2),(3.3),(3.4),(4.2),(4.3),住户区域共有4个像素点,其坐标分别为:(5.7),(6.7),(5.8),(6.8);采用本发明的上述算法,其中疑似烟雾特征区域的9个像素点的坐标被规整为15,23,24,25,32,33,34,42,43,住户区域共有4个像素点,其坐标分别为:57,67,58,68;可以计算其差最小有:|43-57|=14,当阈值为5时,则差不存在小于阈值的符合情形,可以判定该疑似烟雾特征区域不为生活烟雾,因此执行报警。
36.从上内容可以看出,本实施例表示了图5、图6分别设置了偏移住户区域较远的疑似烟雾特征区域。在上述数值化处理了坐标信息后,仅当疑似烟雾特征区域的列数越靠近列住户区域的列数时,差的结果越小,可以达到个位级别,当疑似烟雾特征区域左右横向远离住户区域时,由于列数被规整处于十位以上的位数,因此差的结果表现的越大,因此越能反应其远离住户区域,因此可以表征其为非生活烟雾。因此本发明的阈值可以设置为个位级别即可有效的识别出生活烟雾,又不会导致漏报。例如,所述阈值为:1至5中的任意一个整数。
37.同理,本发明还提供了一种小数规整法,其中的列数被规整为小数点前的整数部分,行数被规整为小数点后的小数部分,其也具备相同的效果。具体如下:进一步的,背景帧图像、当前帧图像均是基于图像左上角为原点建立以像素为单位的直接坐标系u-v,像素的横坐标u与纵坐标v分别是在其图像数组中所在的列数与所在行数,遍历疑似烟雾特征区域中各个像素点的坐标信息与住户区域中各个像素点的坐标信息的差是否存在小于阈值的算法为:将疑似烟雾特征区域中各个像素点的坐标信息和住户区域中各个像素点的坐标信息规整为小数,疑似烟雾特征区域中各个像素点的坐标信息和住户区域中各个像素点的坐标信息分别表示为d(u,v)、d
‘
(u
‘
,v
‘
),d(u,v)、d
‘
(u
‘
,v
‘
)规整为小数后,所得小数分别
为d=u.v、d
‘
=u
‘
.v
‘
、其中列数:u、u
‘
被规整为小数点前的整数部分,行数:v、v
‘
被规整为小数点后的小数部分;疑似烟雾特征区域中各个像素点的坐标信息与住户区域中各个像素点的坐标信息的差表示为:c=|d-d
‘
|=|u.v-u
‘
.v
‘
|。
38.进一步的,所述阈值为:0.1至0.5中的任意一个小数。
39.本发明独创的将坐标信息进行数值化处理,用于进行远近判断的定性分析,以住户区域为基础,从而有效的识别出疑似烟雾特征区域为生活烟雾,而较远的疑似烟雾特征区域择被判定为非生活烟雾。
40.进一步的,背景帧图像、当前帧图像为森林防火监控视频中同一视角下的图像,背景帧图像为人工标定没有烟雾的图像。
41.进一步的,所述烟雾确认判断包括:颜色特征检验确定法或/和形态特征检验确认法或/和运动特征检测确认法。
42.另一方面,森林防火烟雾报警抗干扰处理装置,包括:存储器;一个或多个处理器;及一个或多个模块,存在存储器中并被配置成由所述一个或多个处理器执行,所述一个或多个模块包括:获得背景帧图像的模块;对背景帧图像中的住户区域进行标注,存储住户区域中各个像素点的坐标信息的模块;获得当前帧图像的模块;用当前帧图像和背景帧图像进行背景减除法处理获得疑似烟雾特征区域,存储疑似烟雾特征区域中各个像素点的坐标信息的模块;判断疑似烟雾特征区域中各个像素点的坐标信息与存储住户区域中各个像素点的坐标信息是否符合相近关系的模块;符合相近关系时,不对当前疑似烟雾特征区域进行报警显示、并消除报警的模块;不符合相近关系时,执行烟雾确认判断,烟雾确认判断为否时,不对当前疑似烟雾特征区域进行报警显示、并消除报警的模块;不符合相近关系时,执行烟雾确认判断,烟雾确认判断为是时,对当前疑似烟雾特征区域进行报警显示的模块。
43.可以理解的是,以上实施方式仅仅是为了说明本发明/发明的原理而采用的示例性实施方式,然而本发明/发明并不局限于此。对于本领域内的普通技术人员而言,在不脱离本发明/发明的精神和实质的情况下,可以做出各种变型和改进,这些变型和改进也视为本发明/发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。