技术特征:
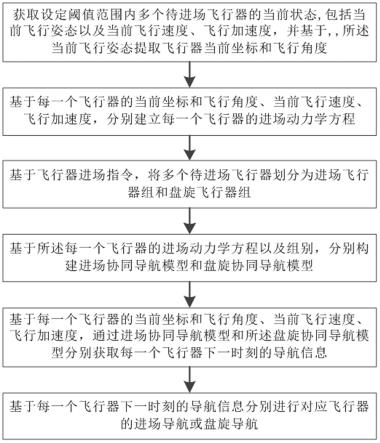
1.一种基于姿态和速度预测的多跑道飞行进场导航方法,其特征在于,所述多跑道飞行进场导航方法包括:步骤s10,获取设定阈值范围内多个待进场飞行器的当前状态;所述当前状态包括当前飞行姿态以及当前飞行速度、飞行加速度,并基于所述当前飞行姿态提取飞行器当前坐标和飞行角度;步骤s20,基于每一个飞行器的当前坐标和飞行角度、当前飞行速度、飞行加速度,分别建立每一个飞行器的进场动力学方程;步骤s30,基于飞行器进场指令,将所述多个待进场飞行器划分为进场飞行器组和盘旋飞行器组;步骤s40,基于所述每一个飞行器的进场动力学方程以及组别,分别构建进场协同导航模型和盘旋协同导航模型;步骤s50,基于每一个飞行器的当前坐标和飞行角度、当前飞行速度、飞行加速度,通过所述进场协同导航模型和所述盘旋协同导航模型分别获取每一个飞行器下一时刻的导航信息;步骤s60,基于每一个飞行器下一时刻的导航信息分别进行对应飞行器的进场导航或盘旋导航。2.根据权利要求1所述的基于姿态和速度预测的多跑道飞行进场导航方法,其特征在于,步骤s20包括:步骤s21,对于多个待进场飞行器的任一飞行器,构建飞行器动坐标系中的质心动力学方程;步骤s22,将动坐标系中飞行器速度、角速度、推力、空气动力和重力,进行飞行器机体坐标系投影;步骤s23,结合所述飞行器动坐标系中的质心动力学方程,以及飞行器机体坐标系投影结果,构建飞行器的进场动力学方程。3.根据权利要求2所述的基于姿态和速度预测的多跑道飞行进场导航方法,其特征在于,所述飞行器动坐标系中的质心动力学方程,其表示为:其中,分别为动坐标系相对惯性坐标系的转动角速度在动坐标系上轴的投影,分别为飞行器的推力在动坐标系上轴的投影分量,分别为飞行器的速度在动坐标系上轴的投影分量,分别为飞行器的加速
度在动坐标系上轴的投影分量。4.根据权利要求3所述的基于姿态和速度预测的多跑道飞行进场导航方法,其特征在于,所述将动坐标系中飞行器速度、角速度、推力、空气动力和重力,进行飞行器机体坐标系投影,其方法为:其方法为:其方法为:其方法为:其方法为:其中,分别为飞行器的速度在机体坐标系上轴的分量,分别为飞行器的转动角速度在机体坐标系上轴的分量,为飞行器的推力,为飞行器的推力在机体坐标系上相对轴的角度,分别为空气动力在动坐标系上轴的投影分量,分别为飞行器的迎角、侧滑角,分别为空气动力投影的升力系数、阻力系数和侧力系数,分别为重力在动坐标系上轴的投影分量,为重力系数,为飞行器对称平面与重心铅锤平面的夹角,为飞行器对称平面与水平面的夹角,代表矩阵转置。5.根据权利要求4所述的基于姿态和速度预测的多跑道飞行进场导航方法,其特征在于,所述飞行器的进场动力学方程,其表示为:。
6.根据权利要求1所述的基于姿态和速度预测的多跑道飞行进场导航方法,其特征在于,所述进场协同导航模型和盘旋协同导航模型基于深度神经网络构建,并结合评价网络通过强化学习进行模型训练,包括:步骤a10,基于飞行器的当前坐标和飞行角度、当前飞行速度、飞行加速度,通过所述进场协同导航模型和所述盘旋协同导航模型分别获取每一个飞行器下一时刻的导航信息;步骤a20,通过评价网络获取每一个飞行器执行所述下一时刻的导航信息下一时刻的导航信息的动作执行奖励值;步骤a30,基于各飞行器的动作执行奖励值以及所述多个待进场飞行器的当前状态,生成各飞行器的状态-联合动作价值函数;步骤a40,分别进行各飞行器的状态-联合动作价值函数的迭代优化以及所述进场协同导航模型和盘旋协同导航模型的参数调整,获得训练好的进场协同导航模型和盘旋协同导航模型。7.根据权利要求6所述的基于姿态和速度预测的多跑道飞行进场导航方法,其特征在于,针对当前飞行器,其时刻状态和时刻状态之间的状态变化通过状态转移方程获取:其中,为时刻飞行器的状态信息在执行导航信息后获得的时刻飞行器的状态信息,为预设的飞行器误差补偿系数矩阵,为预设的比例系数矩阵,为表示状态转移中不确定性的高斯函数,为正态分布的协方差对角矩阵,矩阵对角线上的元素均为,为噪声的方差,为时刻环境干扰信息。8.根据权利要求7所述的基于姿态和速度预测的多跑道飞行进场导航方法,其特征在于,步骤a30包括:步骤a31,将各飞行器的状态信息合并为全局状态信息;基于一层全连接神经网络构建自适应权重学习网络;步骤a32,基于全局状态信息,通过多层感知机拟合状态-联合动作价值函数;其中,表示飞行器的运行轨迹、执行动作,为进场协同导航模型/盘旋协同导航模型的网络参数。9.根据权利要求8所述的基于姿态和速度预测的多跑道飞行进场导航方法,其特征在于,所述状态-联合动作价值函数,其更新原则为:
其中,和分别为更新后的和更新前的状态-联合动作价值函数,为时刻飞行器的状态信息在策略下执行导航信息后获得的动作执行奖励值,为预设的奖励因子。10.根据权利要求8所述的基于姿态和速度预测的多跑道飞行进场导航方法,其特征在于,所述进场协同导航模型/盘旋协同导航模型的网络参数,通过参数寻优和参数修正迭代调整;所述参数寻优,包括:包括:包括:其中,为参数寻优空间的高斯噪声函数,为飞行器动作寻优空间的高斯噪声函数,为在的基础上通过寻优的飞行器动作策略,为参数寻优后的进场协同导航模型/盘旋协同导航模型获取的状态信息对应的动作,为飞行器进场盘旋区域半径,为飞行器进场的航道区域半径;所述参数修正,包括:包括:包括:其中,、、分别为进场协同导航模型/盘旋协同导航模型修正后的神经元连接的循环权重、神经元输入权重和偏置向量,、分别为参数寻优和参数修正迭代中的当
前动作执行奖励值和平均动作执行奖励值,为飞行器进入盘旋区域直至接到入场信号降落的总时长,为模型输入的时刻飞行器的状态信息,为时刻模型隐藏层神经元激活频率,代表矩阵转置。11.根据权利要求6所述的基于姿态和速度预测的多跑道飞行进场导航方法,其特征在于,所述进场协同导航模型/盘旋协同导航模型,其训练中总损失函数包括飞行器之间的互影响损失函数,其表示为:其中,为进场飞行器和盘旋飞行器的总数量,为将进场协同导航模型/盘旋协同导航模型的输出进行聚类的聚类结果,和分别为飞行器和飞行器对应的进场协同导航模型/盘旋协同导航模型输出的大小的矩阵,代表矩阵转置,代表矩阵行中的第行,代表矩阵列中的第列。12.一种基于姿态和速度预测的多跑道飞行进场导航系统,其特征在于,所述多跑道飞行进场导航系统包括:数据获取模块,配置为获取设定阈值范围内多个待进场飞行器的当前状态;所述当前状态包括当前飞行姿态以及当前飞行速度、飞行加速度,并基于所述当前飞行姿态提取飞行器当前坐标和飞行角度;动力学方程构建模块,配置为基于每一个飞行器的当前坐标和飞行角度、当前飞行速度、飞行加速度,分别建立每一个飞行器的进场动力学方程;飞行器划分模块,配置为基于飞行器进场指令,将所述多个待进场飞行器划分为进场飞行器组和盘旋飞行器组;模型构建模块,配置为基于所述每一个飞行器的进场动力学方程以及组别,分别构建进场协同导航模型和盘旋协同导航模型;导航信息获取模块,配置为基于每一个飞行器的当前坐标和飞行角度、当前飞行速度、飞行加速度,通过所述进场协同导航模型和所述盘旋协同导航模型分别获取每一个飞行器下一时刻的导航信息;进场/盘旋导航模块,配置为基于每一个飞行器下一时刻的导航信息分别进行对应飞行器的进场导航或盘旋导航。
技术总结
本发明属于飞行导航技术领域,具体涉及了一种基于姿态和速度预测的多跑道飞行进场导航方法及系统,旨在解决现有技术无法实现快速、有效的多跑道飞行进场导航的问题。本发明包括:获取设定阈值范围内多个待进场飞行器的当前状态,并构建每一个飞行器的进场动力学方程;将飞行器划分为进场飞行器组和盘旋飞行器组;结合进场动力学方程和组别构建进场协同导航模型和盘旋协同导航模型;通过模型分别获取每一个飞行器下一时刻的导航信息;基于每一个飞行器下一时刻的导航信息分别进行对应飞行器的进场导航或盘旋导航。本发明无需增加机场建设,快速、有效地实现了多跑道飞行进场导航,降低航班进场调度导航难度。降低航班进场调度导航难度。降低航班进场调度导航难度。
技术研发人员:张云水 杨磊 李剑华 刘伟 李德斌 吴建荣 王兆祎
受保护的技术使用者:珠海翔翼航空技术有限公司
技术研发日:2022.10.12
技术公布日:2022/11/8
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。