技术特征:
1.一种设备,包括:存储器,配置为存储点云数据;以及一个或多个处理器,其耦合到所述存储器并在电路中实现,所述一个或多个处理器被配置为:获得第一激光角度;获得第二激光角度;获得第三激光角度的激光角度差;基于所述第一激光角度和所述第二激光角度来确定预测值;以及基于所述预测值和所述第三激光角度的所述激光角度差来确定所述第三激光角度。2.根据权利要求1所述的设备,其中,所述一个或多个处理器还被配置为基于所述第三激光角度来对所述点云数据中的点的垂直位置进行解码。3.根据权利要求2所述的设备,其中,所述一个或多个处理器被配置为基于所述第三激光角度和具有所述第三激光角度的激光的激光校正值来对所述点的所述垂直位置进行解码。4.根据权利要求1所述的设备,其中,所述一个或多个处理器被配置为将指定所述第三激光角度的所述激光角度差的语法元素作为左位在先的有符号整数0阶指数哥伦布译码语法元素来进行解码,作为获得所述第三激光角度的所述激光角度差的一部分。5.根据权利要求1所述的设备,其中,所述一个或多个处理器被配置为对指定所述第二激光角度的激光角度差的语法元素进行解码,所述语法元素包括左位在先的有符号整数0阶指数哥伦布译码语法元素,作为获得所述第二激光角度的一部分。6.根据权利要求1所述的设备,其中,所述一个或多个处理器被配置为执行线性预测以基于所述第一激光角度和所述第二激光角度来确定所述预测值,作为确定所述预测值的一部分。7.根据权利要求6所述的设备,其中,所述一个或多个处理器被配置为将所述预测值确定为2*所述第一激光角度加上-1*所述第二激光角度,作为执行线性预测以确定所述预测值的一部分。8.根据权利要求1所述的设备,其中,所述一个或多个处理器还被配置为基于所述第三激光角度对指示垂直面位置的语法元素进行解码。9.根据权利要求1所述的设备,其中:所述第一激光角度指定第一激光的仰角相对于由所述点云数据的第一轴和第二轴定义的水平面的正切,所述第二激光角度指定第二激光的仰角相对于所述水平面的正切,以及所述第三激光角度指定第三激光的仰角相对于所述水平面的正切。10.根据权利要求9所述的设备,其中,所述第一激光、所述第二激光以及所述第三激光包括在激光封装中。11.根据权利要求1所述的设备,还包括显示器,用于呈现基于所述点云数据的图像。12.一种设备,包括:存储器,配置为存储点云数据;以及一个或多个处理器,其耦合到所述存储器并在电路中实现,所述一个或多个处理器被
配置为:获得第一激光角度;获得第二激光角度;基于所述第一激光角度和所述第二激光角度来确定预测值;以及对第三激光角度的激光角度差进行编码,其中,所述激光角度差等于所述第三激光角度与所述预测值之间的差。13.根据权利要求12所述的设备,其中,所述一个或多个处理器被配置为基于具有所述第三激光角度的激光来对所述点云数据中的点的垂直位置进行编码。14.根据权利要求13所述的设备,其中,所述一个或多个处理器被配置为基于所述第三激光角度和具有所述第三激光角度的激光的激光校正值来对所述点的所述垂直位置进行编码。15.根据权利要求12所述的设备,其中,所述一个或多个处理器被配置为将指定所述第三激光角度的所述激光角度差的语法元素编码为左位在先的有符号整数0阶指数哥伦布译码语法元素。16.根据权利要求12所述的设备,其中,所述一个或多个处理器还被配置为对指定所述第二激光角度的激光角度差的语法元素进行编码,其中:所述第二激光角度的所述激光角度差指示所述第二激光角度与所述第一激光角度之间的差,以及指定所述第二激光角度的所述激光角度差的所述语法元素被编码为左位在先的有符号整数0阶指数哥伦布译码语法元素。17.根据权利要求12所述的设备,其中,所述一个或多个处理器被配置为执行线性预测以基于所述第一激光角度和所述第二激光角度来确定所述预测值,作为确定所述预测值的一部分。18.根据权利要求17所述的设备,其中,所述一个或多个处理器被配置为将所述预测值确定为2*所述第一激光角度加上-1*所述第二激光角度,作为执行线性预测以确定所述预测值的一部分。19.根据权利要求12所述的设备,其中:所述第一激光角度指定第一激光的仰角相对于由所述点云数据的第一轴和第二轴定义的水平面的正切,所述第二激光角度指定第二激光的仰角相对于所述水平面的正切,以及所述第三激光角度指定第三激光的仰角相对于所述水平面的正切。20.根据权利要求19所述的设备,还包括激光封装,所述激光封装包括所述第一激光、所述第二激光以及所述第三激光。21.根据权利要求12所述的设备,还包括传感器,用于生成所述点云数据。22.一种方法,包括:获得第一激光角度;获得第二激光角度;获得第三激光角度的激光角度差;基于所述第一激光角度和所述第二激光角度来确定预测值;以及
基于所述预测值和所述第三激光角度的所述激光角度差来确定所述第三激光角度。23.根据权利要求22所述的方法,还包括基于所述第三激光角度来对点云数据中的点的垂直位置进行解码。24.根据权利要求22所述的方法,其中,对所述点云数据中的所述点的所述垂直位置进行解码包括基于所述第三激光角度和具有第三激光角度的激光的激光校正值来对所述点的所述垂直位置进行解码。25.根据权利要求22所述的方法,其中,获得所述第三激光角度的所述激光角度差包括将指定所述第三激光角度的所述激光角度差的语法元素作为左位在先的有符号整数0阶指数哥伦布译码语法元素来进行解码。26.根据权利要求22所述的方法,其中,获得所述预测值包括执行线性预测以基于所述第一激光角度和所述第二激光角度来确定所述预测值。27.根据权利要求22所述的方法,还包括基于所述第三激光角度对指示垂直面位置的语法元素进行解码。28.根据权利要求22所述的方法,其中:所述第一激光角度指定第一激光的仰角相对于由点云数据的第一轴和第二轴定义的水平面的正切,所述第二激光角度指定第二激光的仰角相对于所述水平面的正切,以及所述第三激光角度指定第三激光的仰角相对于所述水平面的正切。29.一种方法,包括:获得第一激光角度;获得第二激光角度;基于所述第一激光角度和所述第二激光角度来确定预测值;以及对第三激光角度的激光角度差进行编码,其中,所述激光角度差等于所述第三激光角度与所述预测值之间的差。30.根据权利要求29所述的方法,还包括基于具有所述第三激光角度的激光来对点云数据中的点的垂直位置进行编码。31.根据权利要求29所述的方法,其中,确定所述预测值包括通过基于所述第一激光角度和所述第二激光角度执行线性预测来确定所述预测值。32.一种设备,包括:用于获得第一激光角度的部件;用于获得第二激光角度的部件;用于获得第三激光角度的激光角度差的部件;用于基于所述第一激光角度和所述第二激光角度来确定预测值的部件;以及用于基于所述预测值和所述第三激光角度的所述激光角度差来确定所述第三激光角度的部件。33.一种设备,包括:用于获得第一激光角度的部件;用于获得第二激光角度的部件;用于基于所述第一激光角度和所述第二激光角度来确定预测值的部件;以及
用于对第三激光角度的激光角度差进行编码的部件,其中,所述激光角度差等于所述第三激光角度与所述预测值之间的差。34.一种在其上存储有指令的计算机可读存储介质,所述指令在执行时使一个或多个处理器:获得第一激光角度;获得第二激光角度;获得第三激光角度的激光角度差语法元素,其中,所述激光角度差语法元素指示所述第三激光角度的激光角度差;基于所述第一激光角度和所述第二激光角度来确定预测值;以及基于所述预测值和所述第三激光角度的所述激光角度差来确定所述第三激光角度。35.一种在其上存储有指令的计算机可读存储介质,所述指令在执行时使一个或多个处理器:获得第一激光角度;获得第二激光角度;基于所述第一激光角度和所述第二激光角度来确定预测值;以及对第三激光角度的激光角度差进行编码,其中,所述激光角度差等于所述第三激光角度与所述预测值之间的差。
技术总结
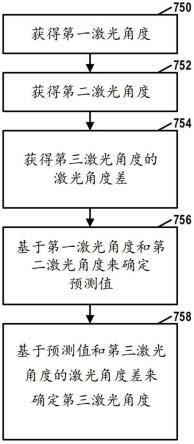
一种方法,包括:获得第一激光角度;获得第二激光角度;获得第三激光角度的激光角度差;基于第一激光角度和第二激光角度来确定预测值;以及基于预测值和第三激光角度的激光角度差来确定第三激光角度。差来确定第三激光角度。差来确定第三激光角度。
技术研发人员:G.范德奥韦拉 L.J.克洛夫斯基 B.雷 A.K.拉马苏布拉马尼安 M.卡尔切维茨
受保护的技术使用者:高通股份有限公司
技术研发日:2021.04.08
技术公布日:2022/11/8
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。