一种巡检机器人用u型悬挂式吊轨
技术领域
1.本发明涉及巡检机器人轨道技术领域,具体涉及一种巡检机器人用u型悬挂式吊轨。
背景技术:
2.随着科技的不断进步,国家愈加重视电网发展,对电力体制进行了深入改革,我国电力系统自动化水平有了大幅度提高,变电站设备的正常工作关系到整个电站的安全生产和可靠运行,因此需要工作人员每天定期对电站运行设备进行巡检,而工作人员的技术水平良莠不齐,对工作的认真程度也各不相同,变电站的日常巡检维护不能得到充分的保障。
3.人们利用机器人代替人工值守,来改善人工值守中出现的问题。巡检机器人主要包括滚轮、驱动模块、控制模块、轨道和视觉等模块,巡检机器人通过在轨道上不定期的移动,并利用热成像以及可见光图像,经传统图像算法或基于卷积神经网络的深度学弟,完成变电站中的目标识别功能,并进行判断以及预警,代替工作人员巡检,节省人力,提高了安全系数。
4.但现有技术中巡检机器人使用的轨道在安装过程中不易拼接,需要使用额外的连接件进行拼接,轨道的安装过程较为麻烦。
技术实现要素:
5.本发明的目的在于提供一种巡检机器人用u型悬挂式吊轨,解决了现有技术中巡检机器人使用的轨道在安装过程中不易拼接,需要使用额外的连接件进行拼接,轨道的安装过程较为麻烦的问题。
6.为实现上述目的,本发明提供了一种巡检机器人用u型悬挂式吊轨,包括弧形轨道、两个直线轨道、齿形带、滑触线、固定块和配合块,两个所述直线轨道的一端分别与所述弧形轨道的端部拆卸连接,并连接形成u型轨道,所述弧形轨道和所述直线轨道的外侧均设置有所述齿形带,而内侧均设置有所述所述滑触线,所述固定块设置在所述弧形轨道的顶部,所述配合块固定在所述直线轨道的顶部,并与所述固定块相配合。
7.其中,所述弧形轨道的端部安装有定位块,所述直线轨道的端部设置有定位槽,所述定位块和所述定位槽相配合。
8.其中,所述弧形轨道的顶部还安装有连接板,所述连接板安装的高度大于所述固定块的安装高度。
9.其中,所述弧形轨道和所述直线轨道的顶部均设有上内凹槽,所述上内凹槽用于轨道吊装固定。
10.其中,所述弧形轨道和所述直线轨道的底部均设有下内凹槽,所述下内凹槽用于对巡检机器人导向巡检。
11.其中,所述齿形带的外侧安装有第一加固板,所述第一加固板的横截面为l形。
12.其中,所述齿形带的外侧还安装有第二加固板,所述第二加固板位于所述第一加
固板的上方。
13.本发明的一种巡检机器人用u型悬挂式吊轨,在使用时,通过将所述固定块插入配合块中,所述固定块和配合块的通孔对齐以完成拼接,之后在通孔中旋入螺栓,将所述弧形轨道和直线轨道安装在设备附近的天花板上,即可完成对轨道的安装工作,如此即不需要使用额外的连接件就能进行连接,简化了轨道的安装步骤,同时将轨道拼成u型,便于巡检机器人来回移动进行巡检工作。
附图说明
14.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍。
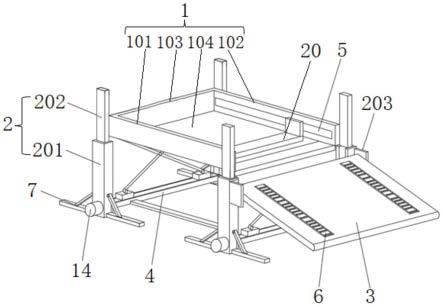
15.图1是本发明第一实施例的一种巡检机器人用u型悬挂式吊轨整体的结构示意图。
16.图2是本发明第一实施例的定位块和弧形轨道的连接示意图。
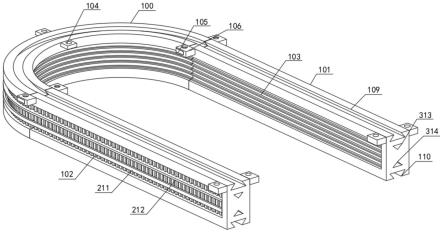
17.图3是本发明第二实施例的一种巡检机器人用u型悬挂式吊轨整体的结构示意图。
18.图4是本发明第三实施例的一种巡检机器人用u型悬挂式吊轨整体的结构示意图。
19.图中:100-弧形轨道、101-直线轨道、102-齿形带、103-滑触线、104-连接板、105-固定块、106-配合块、107-定位块、108-定位槽、109-上内凹槽、110-下内凹槽、211-第一加固板、212-第二加固板、313-第一槽体、314-第二槽体。
具体实施方式
20.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
21.第一实施例:
22.请参阅图1和图2,图1是本发明第一实施例的一种巡检机器人用u型悬挂式吊轨整体的结构示意图,图2是本发明第一实施例的定位块和弧形轨道的连接示意图,本发明提供一种巡检机器人用u型悬挂式吊轨:包括弧形轨道100、两个直线轨道101、齿形带102、滑触线103、固定块105、配合块106、连接板104和定位块107,所述弧形轨道100和所述直线轨道101的顶部和底部分别设置有上内凹槽109和下内凹槽110,所述弧形轨道100的端部还设置有定位槽108。
23.针对本具体实施方式,两个所述直线轨道101的一端分别与所述弧形轨道100的端部拆卸连接,并连接形成u型轨道,所述弧形轨道100和所述直线轨道101的外侧均设置有所述齿形带102,而内侧均设置有所述所述滑触线103,所述固定块105设置在所述弧形轨道100的顶部,所述配合块106固定在所述直线轨道101的顶部,并与所述固定块105相配合。两个所述直线轨道101的一端分别与所述弧形轨道100的端部连接,并形成u型轨道,所述弧形轨道100和所述直线轨道101的内侧凹槽中均安装有所述滑触线103,巡检机器人上的集电器通过所述滑触线103取电,为整个机器人电气系统供电,所述弧形轨道100和所述直线轨道101的外侧凹槽中均安装有所述齿形带102,所述齿形带102与巡检机器人的同步轮啮合,从而实现巡检机器人通过轨道行走巡检,所述弧形轨道100靠近所述直线轨道101端部的内外侧均设置有所述固定块105,所述直线轨道101靠近所述弧形轨道100端部的内外侧均设置有所述配合块106,所述配合块106的顶面与所述直线轨道101的顶面平齐,所述配合块
106的内部设置有开口槽,开口槽的大小与所述固定块105的外形相适配。
24.其中,所述弧形轨道100的端部安装有定位块107,所述直线轨道101的端部设置有定位槽108,所述定位块107和所述定位槽108相配合。所述直线轨道101靠近所述弧形轨道100的端部设置有所述定位槽108,而所述弧形轨道100的两个端部安装有所述定位块107,通过所述定位块107和所述定位槽108配合便于所述弧形轨道100和所述直线轨道101定位连接。
25.所述弧形轨道100的顶部还安装有连接板104,所述连接板104安装的高度大于所述固定块105的安装高度。所述弧形轨道100的顶部内外侧均安装有所述连接板104,所述连接板104的顶面与所述弧形轨道100的顶部平齐。
26.同时,所述弧形轨道100和所述直线轨道101的顶部均设置有上内凹槽109,所述上内凹槽109用于轨道吊装固定;所述弧形轨道100和所述直线轨道101的底部均设置有下内凹槽110,所述下内凹槽110用于对巡检机器人导向巡检。所述弧形轨道100和所述直线轨道101的顶部和底部分别设置有所述上内凹槽109和所述下内凹槽110,所述上内凹槽109和所述下内凹槽110的横截面均为梯形。
27.使用本实施例的一种巡检机器人用u型悬挂式吊轨时,通过在所述上内凹槽109中滑入吊装用具便于对所述弧形轨道100和所述直线轨道101进行连接和吊装,所述定位块107和定位槽108配合对所述弧形轨道100和直线轨道101首次拼接,这时所述固定块105插入配合块106中,所述固定块105和配合块106的通孔对齐,从而完成拼接,之后在通孔中旋入螺栓,将所述弧形轨道100和直线轨道101安装在设备附近的天花板上。本发明通过在所述连接板104中旋入螺栓加固所述弧形轨道100安装的牢固度,从而完成对轨道的安装工作,不需要使用额外的连接件就能进行连接,简化了轨道的安装步骤,同时将轨道拼成u型,便于巡检机器人来回移动进行巡检工作。
28.第二实施例:
29.在第一实施例的基础上,请参阅图3,图3是本发明第二实施例的一种巡检机器人用u型悬挂式吊轨整体的结构示意图,本发明提供一种巡检机器人用u型悬挂式吊轨还包括第一加固板211和所述第二加固板212。
30.针对本具体实施方式,所述齿形带102的外侧安装有第一加固板211,所述第一加固板211的横截面为l形。所述弧形轨道100和所述直线轨道101的外侧凹槽中安装有所述第一加固板211,所述第一加固板211为u形,其横截面为l形。
31.其中,所述齿形带102的外侧还安装有第二加固板212,所述第二加固板212位于所述第一加固板211的上方。所述弧形轨道100和所述直线轨道101的外侧凹槽中还安装有所述第二加固板212,所述第二加固板212位于所述第一加固板211的上方,所述第二加固板212同样为u形。
32.使用本实施例的一种巡检机器人用u型悬挂式吊轨时,通过所述第一加固板211与巡检机器人的滑块配合,并对巡检机器人的滑块和轨道之间进行限位,避免巡检机器人在移动过程中偏移,从而避免卡顿、打滑的现象的出现;同时通过所述第二加固板212和所述第一加固板211的配合使得轨道受力均匀,从而保证巡检机器人在轨道上稳定地运行。
33.第三实施例:
34.在第一实施例的基础上,请参阅图4,图4是本发明第三实施例的一种巡检机器人
用u型悬挂式吊轨整体的结构示意图,本发明提供一种巡检机器人用u型悬挂式吊轨还包括第一槽体313和第二槽体314。
35.针对本具体实施方式,所述直线轨道101的内部设置有第一槽体313,所述第一槽体313将所述直线轨道101贯穿;所述直线轨道101的内部还设置有第二槽体314,所述第二槽体314位于所述直线轨道101的内部,并位于所述第一槽体313的下方。
36.使用本实施例的一种巡检机器人用u型悬挂式吊轨时,所述第一槽体313和所述第二槽体314的横截面为三角形,通过在所述直线轨道101内部设置槽体,并在槽体中安装加强筋,实现在保证所述直线轨道101自身牢固度的情况下,减轻轨道的重量,从而使得轨道安装更稳定。
37.以上所揭露的仅为本技术一种或多种较佳实施例而已,不能以此来限定本技术之权利范围,本领域普通技术人员可以理解实现上述实施例的全部或部分流程,并依本技术权利要求所作的等同变化,仍属于本技术所涵盖的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。