1.本发明涉及农业支援系统。
背景技术:
2.专利文献1所公开的田地供水预约系统是对田地的集合体即田地群预约灌溉用水的供水的田地供水预约系统,具备:容许最大供水量取得单元,其取得给定期间内的每个田地群的容许最大供水量;和供水日程表管理单元,其基于包含田地识别信息、供水日期时间信息以及必要供水量的供水预约信息,按每个田地群来生成包含需要供水量的合计低于容许最大供水量的能供水量以及可能供水日期时间的能供水日程表。
3.在先技术文献
4.专利文献
5.专利文献1:日本公开专利公报“特开2019-179293号公报”
技术实现要素:
6.发明所要解决的课题
7.在专利文献1的供水日程表管理单元中,能在需要的时期将需要的量的灌溉用水对田地进行供水。
8.但为了利用专利文献1那样的供水日程表管理单元对田地进行合适的量的供水、或即使是存在田地的凹凸、倾斜的情况也使拖拉机、联合收割机等作业车辆准确地行驶,需要预先准确地取得包括田地的高度在内的田地的状态。
9.本发明是为了解决这样的现有技术的问题点而提出的,起目的在于,提供一种容易地取得田地的状态的农业支援系统。
10.用于解决课题的手段
11.本发明的一个方式所涉及的农业支援系统具备:信息取得部,其取得作业车辆在田地行驶时的高度;和田地信息运算部,其基于作为信息取得部所取得的高度的多个高度来运算田地的状态。
12.此外,信息取得部取得使作业车辆在第1时期行驶时的高度即第1高度和使作业车辆在第2时期行驶时的高度即第2高度,田地信息运算部基于作为多个高度而由信息取得部取得的第1高度和第2高度,来运算田地的状态。
13.此外,田地信息运算部基于第1高度与第2高度的差来运算田地的表土深度,作为田地的状态。
14.此外,信息取得部取得作业车辆在第1时期位于给定的基准位置时的高度即第1基准高度和作业车辆在第2时期位于基准位置时的高度即第2基准高度,田地信息运算部基于用第1基准高度校正第1高度而得到的高度与用第2基准高度校正第2高度而得到的高度的差来运算田地的表土深度,作为田地的状态。
15.此外,农业支援系统具备:显示装置,其显示与信息取得部所取得的高度相关的高
度信息,显示装置显示田地的坡度,作为高度信息。
16.此外,显示装置显示作为高度信息而根据高度得到的相对于基准面的差分。
17.此外,农业支援系统具备:高度检测装置,其设于作业车辆,且基于定位卫星的信号来检测作业车辆在田地行驶时的高度;和支援装置,其具有取得高度检测装置检测到的高度的信息取得部、和基于作为信息取得部所取得的高度的多个高度来运算田地的状态的田地信息运算部。
18.此外,高度检测装置包含设于在第1时期进行作业的作业车辆即第1作业车辆的第1检测装置、和设于在第2时期进行作业的作业车辆即第2作业车辆的第2检测装置,信息取得部取得第1检测装置检测到的高度即第1高度和第2检测装置检测到的高度即第2高度,田地信息运算部基于作为多个高度而由信息取得部取得的第1高度和第2高度,来运算田地的状态。
19.此外,田地信息运算部基于第1高度与第2高度的差来与运算田地的表土深度,作为田地的状态。
20.此外,信息取得部取得在第1作业车辆位于给定的基准位置时由第1检测装置检测到的高度即第1基准高度、和在第2作业车辆位于基准位置时由第2检测装置检测到的高度即第2基准高度,田地信息运算部基于用第1基准高度校正第1高度而得到的高度与用第2基准高度校正第2高度而得到的高度的差,来运算田地的表土深度,作为田地的状态。
21.此外,农业支援系统具备:显示装置,其显示与信息取得部所取得的高度相关的高度信息,显示装置显示田地的坡度,作为高度信息。
22.此外,农业支援系统具备:显示装置,其显示与信息取得部所取得的高度相关的高度信息,显示装置显示作为高度信息而根据高度得到的相对于基准面的差分。
23.发明效果
24.根据上述农业支援系统,能容易地取得田地的状态。
附图说明
25.图1是表示第1实施方式中的农业支援系统的图。
26.图2是说明分布图(map)运算部所进行的分割数据的分配的图。
27.图3是表示一览表t1的图。
28.图4是说明显示于显示装置的第1画面的图。
29.图5是说明显示于第1画面的显示变更部的图。
30.图6是说明显示于第1画面的众数选择部的图。
31.图7是说明显示于第1画面的图例显示部的图。
32.图8是说明显示于显示装置的第2画面的图。
33.图9是说明显示于显示装置的第3画面的第1图。
34.图10是说明显示于显示装置的第3画面的第2图。
35.图11是说明显示于显示装置的第4画面的图。
36.图12是表示第2实施方式中的农业支援系统的图。
37.图13是说明显示于显示装置的第5画面的图。
38.图14是表示田地的剖视图的图。
具体实施方式
39.以下,参照附图来说明本发明的一个实施方式。
40.[第1实施方式]
[0041]
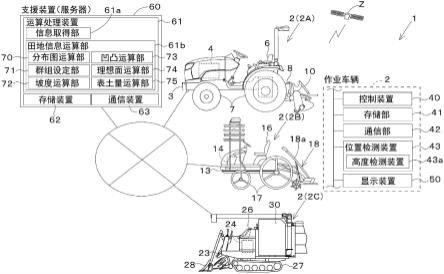
图1表示农业支援系统1。农业支援系统1例如是基于作业车辆2在田地行驶时的高度来运算田地的状态的系统。作业车辆2包含安装工作机械等作业装置10的拖拉机2a、插秧机2b以及进行收获的联合收割机2c等农业机械。
[0042]
如图1所示那样,拖拉机2a具备:具有行驶装置7的行驶车辆3;原动机4;和变速装置(图示略)。行驶装置7是轮胎型的行驶装置或履带型的行驶装置。原动机4是柴油引擎、电动马达等。变速装置能通过变速来切换行驶装置7的推进力,并且能切换行驶装置7的前进、后退。在行驶车辆3中设有驾驶座6。
[0043]
此外,在行驶车辆3的后部设有由3点连杆机构等构成的连结部8。在连结部8能拆装作业装置10。通过将作业装置10与连结部8连结,能由行驶车辆3牵引作业装置10。作业装置10是进行耕耘的耕耘装置、散布肥料的肥料散布装置、散布农药的农药散布装置、进行收获的收获装置、进行牧草等的收割的收割装置、进行牧草等的扩散的扩散装置、进行牧草等的集草的集草装置、进行牧草等的成形的成形装置等。在本实施方式中,作业装置10是耕耘装置,耕耘装置被拖拉机2a牵引来进行田地的耕耘。
[0044]
如图1所示那样,插秧机2b具备:具有行驶装置17的行驶车辆13;原动机14;变速装置(图示略);和秧苗插植装置18。行驶装置17是轮胎型的行驶装置。原动机14是柴油引擎、电动马达等。变速装置能通过变速来切换行驶装置17的推进力,并且能切换行驶装置17的前进、后退。在行驶车辆13设有驾驶座16。秧苗插植装置18设于行驶车辆13的后部。秧苗插植装置18具有搭载秧苗的秧苗载台18a,从该秧苗载台18a将秧苗取出,插植到田地等。
[0045]
如图1所示那样,联合收割机2c具备:具有行驶装置27的行驶车辆23;原动机24;变速装置(图示略);收割作物(例如谷物)的收割部28;进行脱粒处理的脱粒装置(图示略);和存积脱粒后的作物的谷粒箱30。原动机24是柴油引擎、电动马达等。变速装置能通过变速来切换行驶装置27的推进力,并且能切换行驶装置27的前进、后退。在行驶车辆23设有驾驶座26。另外,作业车辆2只要是在田地行驶的车辆即可,前述的作业车辆2是一例,并没有限定,此外,拖拉机2a、插秧机2b以及联合收割机2c的结构并不限定于上述的结构。
[0046]
如图1所示那样,作业车辆2具备控制装置40、存储部41、通信部42和位置检测装置43。控制装置40是控制作业车辆2的装置,是cpu等。例如,控制装置40基于设于作业车辆2的操作装置的操作来进行原动机等设备的控制。
[0047]
存储部41是非易失性的存储器等,构成存储信息的存储区域。存储部41存储控制装置40的控制程序、从外部取得的信息。
[0048]
通信部42是与外部(例如后述的支援装置60)进行直接通信以及间接通信的任一者的通信模块,例如能通过作为通信标准的ieee802.11系列的wi-fi(wireless fidelity、注册商标)、ble(bluetooth(注册商标)low energy)、lpwa(low power,wide area,低功率,广域)、lpwan(low-power wide-area network,低功率广域网)等来进行无线通信。此外,通信部42例如能通过移动电话通信网或数据通信网等进行无线通信。
[0049]
位置检测装置43安装于作业车辆2。另外,位置检测装置43的作业车辆2中的安装场所并没有限定,也可以是其他场所。位置检测装置43是通过卫星定位系统来检测自己的
位置(包含纬度、经度、高度的定位信息)的装置。即,位置检测装置43接收从定位卫星z发送的信号(定位卫星z的位置、发送时刻、校正信息等),基于接收到的信号来检测位置(纬度、经度以及高度)。另外,位置检测装置43也可以将基于来自能接收来自定位卫星z的信号的基站(基准站)的校正等的信号进行校正后的位置检测为自己的位置(纬度、经度以及高度)。此外,也可以位置检测装置43具有陀螺仪传感器、加速度传感器等惯性测量装置,将由惯性测量装置进行校正后的位置检测为自己的位置。
[0050]
如图1所示那样,农业支援系统1具备显示装置50。显示装置50是能显示各种信息的装置,是具有液晶面板、触控面板、其他面板的任一者的装置。例如,显示装置50是设于在作业车辆2搭乘的作业者的周围的终端显示装置。终端显示装置经由车载网络与控制装置40以及通信部42等连接。终端显示装置经由通信部42等从支援装置60取得各种信息,并能显示该信息。另外,显示装置50能显示从支援装置60取得的信息即可,并不限于上述的终端显示装置,也可以是搭乘在作业车辆2来操作该作业车辆2的驾驶者所持有的便携终端、管理者所具有的管理终端。便携终端以及管理终端由pc、运算能力比较高的智能手机(多功能移动电话)等构成。在相关的情况下,便携终端以及管理终端具有与支援装置60进行直接通信以及间接通信的任一者的装置,能经由该装置从支援装置60取得各种信息,并显示该信息。
[0051]
如图1所示那样,支援装置60例如是设置于农家、农业经营公司、作业机械(农业机械)制造商、农业的服务设施等的服务器。支援装置60进行从外部接收(取得)的信息(数据)的存储、运算处理、管理。支援装置60具有运算处理装置61、存储装置62和通信装置63。运算处理装置61由cpu、电子电路等构成,进行从外部取得的各种信息的运算处理。
[0052]
存储装置62是非易失性的存储器等,构成存储信息的存储区域。存储装置62存储运算处置装置的处理程序、从外部取得的信息。
[0053]
通信装置63是与作业车辆2进行直接通信以及间接通信的任一者的通信模块,例如能通过作为通信标准的ieee802.11系列的wi-fi(wireless fidelity、注册商标)、ble(bluetooth(注册商标)low energy)、lpwa(low power,wide area)、lpwan(low-power wide-area network)等进行无线通信。此外,通信装置63例如能通过移动电话通信网或数据通信网等进行无线通信,经由通信部42以及车载网络进行间接通信,将进行了运算处理的各种信息输出到显示装置50。另外,在显示装置50是便携终端以及管理终端的情况下,支援装置60与显示装置50进行直接通信,能将进行了运算处理的各种信息输出到显示装置50。
[0054]
如图1所示那样,农业支援系统1具备高度检测装置43a、信息取得部61a和田地信息运算部61b。高度检测装置43a设于作业车辆2,且基于定位卫星z的信号来检测作业车辆2在田地行驶时的高度。在本实施方式中,高度检测装置43a由位置检测装置43兼用。高度检测装置43a(位置检测装置43)接收从定位卫星z发送的信号(定位卫星z的位置、发送时刻、校正信息等),基于接收到的信号来检测位置(纬度、经度以及高度),控制装置40将该纬度、经度以及高度与作业车辆2的个别信息、检测到的日期等建立对应,从而作为位置信息存储到存储部41。
[0055]
另外,在本实施方式中,位置检测装置43兼用高度检测装置43a,但高度检测装置43a也可以与位置检测装置43分开设置,在基于位置检测装置43接收到的卫星信号来检测
纬度以及经度且不检测高度的情况下,高度检测装置43a可以与位置检测装置43分开地设于作业车辆2,基于卫星信号、加速度信息等来检测高度。将存储于存储部41的位置信息通过通信部42输出到支援装置60。
[0056]
信息取得部61a以及田地信息运算部61b由运算处理装置61兼用,由该运算处理装置61的cpu、电子电路等构成。信息取得部61a取得作业车辆2在田地行驶时的高度。具体地,信息取得部61a经由通信装置63以及通信部42从作业车辆2取得位置信息。信息取得部61a基于预先存储于存储装置62的校正值来将位置信息当中的高度校正成作业车辆2的接地面的高度。校正值是以接地面为基准的位置检测装置43的高度。由此,信息取得部61a取得作业车辆2在田地行驶时的高度。将信息取得部61a所取得的高度与检测到该高度的位置处的纬度、经度、作业车辆2的个别信息以及检测到的日期等建立对应,从而作为高度数据存储到存储装置62。为此,在存储装置62中蓄积多个高度数据,在存储装置62中存储有多个与纬度以及经度建立对应的高度的信息。另外,信息取得部61a取得作业车辆2在田地行驶时的高度即可,其取得方法并不限定于上述方法。
[0057]
田地信息运算部61b基于作为信息取得部61a所取得的高度的多个高度,来运算田地的状态。田地信息运算部61b对信息取得部61a所取得的高度数据进行给定的运算处理。具体地,田地信息运算部61b例如具有分布图运算部70和群组设定部71。分布图运算部70以及群组设定部71由运算处理装置61所具有的电气/电子部件、电气电路以及存放于存储装置62的程序等构成。
[0058]
分布图运算部70进行如下处理:基于信息取得部61a所取得的高度,来将基于该高度的信息分配到田地内。分布图运算部70基于信息取得部61a所取得的高度,来将信息取得部61a所取得的高度作为田地的高度分配到田地内,或者,基于将基于该高度和任意的基准,将距该基准的高度作为田地的高度分配到田地内。
[0059]
具体地,分布图运算部70取得作为信息取得部61a所取得的高度的多个高度当中的最小值,作为基准。分布图运算部70若取得最小值,就算出作为信息取得部61a所取得的高度的多个高度与最小值的差分。即,该差分是以所取得的最小值为基准的田地的高度。分布图运算部70将各个差分设为分割数据(第1分割数据d1n、n=1、2、3
…
n),基于高度数据的纬度以及经度,来对检测到高度的每个位置分配第1分割数据d1n。
[0060]
例如,如图2所示那样,分布图运算部70作成将1个田地内区分成多个区域qn(n=1、2、3
…
n)的网格型的分布图,并分配与多个区域qn分别对应的分割数据(第1分割数据d1n)。例如,如图2所示那样,在网格尺寸为10m的情况下,分布图运算部70将区域qn的1边的宽度(纵宽、横宽)设定为10m,每隔10m将作业场所划分为多个区域qn,作为填入到通过以该网格尺寸进行划分而形成的区域qn的数据,分割高度与最小值的差分。在此,在填入到区域qn的差分有多个的情况下,分布图运算部70例如将数据的值(差分)平均,将平均值作为与区域qn对应的第1分割数据d1n来分配。此外,在填入到区域qn的数据是1个的情况下,分布图运算部70将该数据作为与区域qn对应的第1分割数据d1n来分配。将分布图运算部70对每个区域qn分配第1分割数据d1n而得到的分布图信息作为田地的状态分布图存储到存储装置62。
[0061]
另外,可以操作与支援装置60能通信地连接的终端来设定变更网格尺寸。此外,基于信息取得部61a所取得的高度来将田地的高度分配到分布图的方法并不限定于上述的方
法,也可以将所取得的高度作为填入到区域qn的数据进行分割,也可以将高度作为配置于分布图上的绘图来进行分配,还可以是在分布图上作成与群组对应的等高线来分配高度这样的结构。此外,在本实施方式中,第1分割数据d1n是以作为信息取得部61a所取得的高度的多个高度当中的最小值为基准的高度,但也可以将该最小值以外的任意的高度作为基准。
[0062]
如图2所示那样,群组设定部71按每个区域qn,对于与各个区域qn对应的分割数据设定群组。例如,群组设定部71在状态分布图中,针对由分布图运算部70分配的每个区域qn的第1分割数据d1n设定群组。在支援装置60中预先存储表示群组数与每个群组的基准值(上限值、下限值)的关系的群组设定信息,群组设定部71参照群组设定信息,对分割数据与每个群组的基准值进行比较,并对每个分割数据分配群组,由此来设定群组。
[0063]
分割数据对应于高度的数值而被分成多个阶段的群组,将高度最低的(值最小的)群组分配到“第1群组g1”,将高度最高的(值最大的)群组分配到“第n群组gn”。在本实施方式中,如图3的一览表t1所示那样,群组是第1群组g1到第5群组g5这5阶段。在“第1群组g1”到“第5群组g5”之间,从数值的大小较低的群组起依次分配“第2群组g2”~“第4群组g4”。另外,将分割数据分到哪个群组是任意的,并不限定于上述的示例。图3所示的数值是用于说明群组划分的数值,并没有限定。
[0064]
如图4所示那样,显示装置50能显示表示作业车辆2所行驶的田地的周边地图的第1画面m1。第1画面m1至少显示与信息取得部61a所取得的高度相关的高度信息。此外,第1画面m1能显示田地的高度,作为高度信息。第1画面m1显示分布图显示部80、显示切换部81、操作部82和显示变更部83。
[0065]
显示装置50从支援装置60取得存储于存储装置62的状态分布图,在分布图显示部80显示状态分布图。分布图显示部80是针对与多个区域qn分别对应的第1分割数据d1n对应于该第1分割数据d1n的大小(值)来分配表示田地的高度的多个群组(多个等级)而得到的分布图。在分布图显示部80中,按多个区域qn的每一者以颜色、数值、字符等示出群组(等级),以使得能识别在群组设定部71中预先分配的群组(等级)。在图4的示例的情况下,在第1画面m1的多个区域qn内示出的数值表示田地的高度。
[0066]
显示切换部81是能操作的显示图像,通过被操作,将显示于显示装置50的画面从第1画面m1切换为不同的画面。此外,在显示切换部81显示能过渡的画面的名称,显示中的画面的名称变灰而显示。
[0067]
操作部82是能对显示于分布图显示部80的状态分布图进行各种操作的显示区域。操作部82例如能进行使分布图放大以及缩小的操作、使分布图显示作业车辆2的当前地的操作。
[0068]
显示变更部83是能操作的显示图像,通过被操作,能变更显示于状态分布图的群组的显示方式。显示变更部83例如具有按每个群组区分的条状图像83a和滑块图像83b。条状图像83a是宽度方向上长条的显示图像,从左侧起依次分配不同的显示方式。在本实施方式中,条状图像83a从左侧起依次分配“1”~“10”。
[0069]
滑块图像83b是显示于条状图像83a上的显示图像,通过在条状图像83a上左右移动,能选择显示于分布图显示部80的状态分布图的群组的显示方式。在本实施方式中,滑块图像83b是左右方向的长度至少比条状图像83a的左右方向的长度短的框状的显示图像。滑
块图像83b的左端部与第1群组g1对应,滑块图像83b的右端部与第5群组g5对应。为此,通过使滑块图像83b在左右方向上移动,能选择第1群组g1~第5群组g5的显示方式。
[0070]
若操作显示变更部83选择了群组的显示方式,则显示装置50基于该操作信息来变更显示于状态分布图的群组的显示方式进行显示。显示变更部83例如如图4所示那样,在初始状态下,作为第1群组g1的显示方式而选择“1”,作为第2群组g2的显示方式而选择“2”,作为第3群组g3的显示方式而选择“3”,作为第4群组g4的显示方式而选择“4”,作为第5群组g5的显示方式而选择“5”。此外,如图5所示那样,在使滑块图像83b移动从而显示变更部83作为第1群组g1的显示方式而选择“3”、作为第5群组g5的显示方式而选择“7”的情况下,作为第2群组g2的显示方式而选择“4”,作为第3群组g3的显示方式而选择“5”。
[0071]
另外,显示变更部83只要通过被操作而能变更显示于状态分布图的群组的显示方式即可,其变更方法、显示方式并不限定于上述的结构。
[0072]
此外,显示变更部83可以具有众数选择部83c。众数选择部83c是与条状图像83a相邻显示的能操作的显示图像,通过被操作,来使滑块图像83b移动,以使得作为与分割数据的众数对应的群组的显示方式,选择分配到条状图像83a上的中央的显示方式。即,将相当于分割数据的众数的条状图像83a上的中央的显示方式显示为水平的基准面f1。例如,在图6所示的示例中,由于众数是第2群组g2,因此,使滑块图像83b移动,以使得作为该第2群组g2的显示方式,选择分配到条状图像83a上的中央的显示方式即“5”。
[0073]
此外,如图7所示那样,第1画面m1也可以取代显示变更部83,而是显示示出群组与第1分割数据d1n的关系的图例显示部84。图例显示部84是宽度方向上长条的显示图像,从左侧起依次分配不同的显示方式。在本实施方式中,以字符显示群组,图例显示部84从左侧起依次分别分配与第1群组g1~第5群组g5对应的“1”~“5”,在该数字的附近显示表示第1分割数据d1n的数值。
[0074]
此外,显示装置50可以基于信息取得部61a所取得的高度来显示田地的坡度。如图1所示那样,田地信息运算部61b具有坡度运算部72。坡度运算部72由运算处理装置61所具有的电气/电子部件、电气电路以及存放于存储装置62的程序等构成。
[0075]
坡度运算部72基于信息取得部61a所取得的高度来算出田地的坡度。分布图运算部70基于分配到田地内的高度来算出田地的坡度(坡度的方位以及坡度的角度)。坡度运算部72例如基于信息取得部61a所取得的高度和最小二乘法来进行最小二乘平面计算,从而算出田地的坡度。详细地,坡度运算部72通过根据基于信息取得部61a所取得的高度的第1分割数据d1n进行最小二乘平面计算,来算出田地的坡度。由此,根据坡度运算部72所算出的田地的坡度,来如图14所示那样算出成为田地的基准的倾斜面(基准面)f1。坡度运算部72所算出的坡度存储到存储装置62。
[0076]
另外,坡度运算部72所进行的坡度的算出方法并不限定于上述的方法,坡度运算部72可以通过根据信息取得部61a所取得的高度进行最小二乘平面计算,来算出田地的坡度,也可以不依赖最小二乘法地进行坡度的算出。
[0077]
首先,说明坡度运算部72能取得对田地进行供水的场所(供水部)和进行排水的场所(排水部)的位置信息的情况。供水部以及排水部的位置信息例如预先存储于存储装置62,通过能与支援装置60通信地连接的终端输入供水部以及排水部的位置信息。在通过终端输入供水部以及排水部的位置信息的情况,例如在显示于该终端的田地的分布图中分别
选择供水部以及排水部的位置来进行输入。
[0078]
坡度运算部72若从存储装置62等取得供水部和排水部的位置信息,就基于该位置信息来算出供水部与排水部之间的距离、和从供水部朝向排水部的方位(坡度的方位)。此外,坡度运算部72基于与供水部对应的区域qa的分割数据d1a和与排水部对应的区域qb的分割数据d1b,来算出排水部与供水部的高度的差分。坡度运算部72基于所算出的距离与差分的正切来算出坡度的角度。
[0079]
此外,在坡度运算部72不能取得供水部以及排水部的位置信息的情况下,坡度运算部72例如基于田地的周部中的区域的第1分割数据d1n来进行田地的坡度的算出。首先,坡度运算部72将田地的周部中的区域qn当中的与一个区域qn对应的第1分割数据d1n和与该一个区域qn相邻的区域qn进行平均,将算出的分割数据d2n作为该一个区域qn的分割数据来分配。若坡度运算部72进行分割数据d2n的分配,则将田地的周部中的区域的分割数据d2n当中的高度最高的区域检测为与供水部对应的区域qa,将高度最低的区域检测为与排水部对应的区域qb。若坡度运算部72检测到区域qa和区域qb,则基于区域qa以及区域qb的位置信息来算出供水部与排水部之间的距离和从供水部朝向排水部的方位。此外,坡度运算部72基于与供水部对应的区域qa的进行平均化前的分割数据d1a和与排水部对应的区域qb的进行平均化前的分割数据d1b,来算出排水部与供水部的高度的差分。坡度运算部72基于所算出的距离与差分的正切,来算出坡度。
[0080]
如图8所示那样,显示装置50能取代第1画面m1而显示表示作业车辆2所行驶的田地的周边地图的第2画面m2。第2画面m2能显示田地的坡度,作为高度信息。第2画面m2显示分布图显示部90、显示切换部91、操作部92、图例显示部93和坡度显示部94。第2画面m2所显示的分布图显示部90与第1画面m1所显示的分布图显示部80等同样地示出状态分布图。显示切换部91与第1画面m1所显示的显示切换部81等同样,通过被操作,将显示于显示装置50的画面从第2画面m2切换为不同的画面。操作部92能与第1画面m1所显示的操作部82等同样地对显示于分布图显示部90的状态分布图进行各种操作。此外,图例显示部93与第1画面m1所显示的图例显示部84等同样地显示群组与第1分割数据d1n的关系。
[0081]
坡度显示部94是显示坡度运算部72所运算的田地的坡度的显示区域。如图8所示那样,例如坡度显示部94以数值显示田地的坡度的角度,以箭头状的图标94a显示坡度的方位。具体地,显示装置50从支援装置60取得存储于存储装置62的坡度的角度以及坡度的方位,基于该坡度的角度以及坡度的方位来显示坡度显示部94。在本实施方式中,坡度显示部94将坡度的角度以数值显示为“0.03
°”
。此外,坡度显示部94的图标94a朝向左侧,表示坡度的方位是从田地的右侧朝向左侧。
[0082]
此外,显示装置50也可以显示相对于根据信息取得部61a所取得的高度而得到的基准面f1的差分(凹凸)。如图1所示那样,田地信息运算部61b具有凹凸运算部73。凹凸运算部73由运算处理装置61所具有的电气/电子部件、电气电路以及存放于存储装置62的程序等构成。
[0083]
田地信息运算部61b具有凹凸运算部73。凹凸运算部73由运算处理装置61所具有的电气/电子部件、电气电路以及存放于存储装置62的程序等构成。
[0084]
凹凸运算部73算出作为高度信息而根据高度得到的相对于基准面f1的差分,来算出相对于基准面f1的凹凸。在本实施方式中,如图14所示那样,基准面f1是基于坡度运算部
72所算出的坡度的倾斜面。首先,凹凸运算部73取得坡度运算部72所算出的坡度。凹凸运算部73若取得坡度,就基于该坡度算出校正系数(第3分割数据d3n),以使得基准面(倾斜面)f1朝向水平方向,即,倾斜面f1朝向铅垂方向。在相关的情况下,第3分割数据d3n当中的与排水部对应的区域qb的第3分割数据d3b成为零。
[0085]
凹凸运算部73若算出每个区域qn的基准面f1的第3分割数据d3n,则算出与每个区域qn分别对应的第1分割数据d1n与算出的基准面f1的第3分割数据d3n的差分,作为凹凸。凹凸运算部73将算出的差分作为第4分割数据d4n,来进行向田地内的分配。凹凸运算部73按每个区域qn算出的第4分割数据d4n分别被分配到每个区域qn,作为田地的凹凸分布图存储到存储装置62。此外,若在存储装置62中存储了凹凸分布图,则群组设定部71对在凹凸分布图中由凹凸运算部73分配的每个区域qn的第4分割数据d4n设定群组。
[0086]
如图9所示那样,显示装置50能取代第1画面m1以及第2画面m2,而显示表示作业车辆2所行驶的田地的周边地图的第3画面m3。第3画面m3能显示作为高度信息而根据高度得到的相对于基准面f1的差分(凹凸)。第3画面m3显示分布图显示部100、显示切换部101、操作部102、图例显示部103和坡度显示部104。第3画面m3所显示的分布图显示部100与第1画面m1以及第2画面m2所显示的分布图显示部80、90不同,示出凹凸分布图。显示装置50从支援装置60取得存储于存储装置62的凹凸分布图,在分布图显示部100显示凹凸分布图。分布图显示部100是针对与多个区域qn分别对应的第4分割数据d4n对应于该第4分割数据d4n的大小(值)来分配表示田地的高度的多个群组(多个等级)的分布图。在分布图显示部100中,与状态分布图等同样,按多个区域qn的每一者以颜色、数值、字符等示出群组(等级),以使得能识别在群组设定部71中预先分配的群组(等级)。在图9的示例的情况下,在第3画面m3的多个区域qn内示出的数值表示田地的相对于基准面f1的凹凸的高度。
[0087]
显示切换部101与第1画面m1所显示的显示切换部81等同样,通过被操作,来将显示于显示装置50的画面从第3画面m3切换为不同的画面。操作部102与第1画面m1所显示的操作部82等同样,能对显示于分布图显示部100的状态分布图进行各种操作。此外,图例显示部103与第1画面m1所显示的图例显示部84等同样,显示群组与第4分割数据d4n的关系。坡度显示部104与第2画面m2所显示的坡度显示部94同样,是显示坡度运算部72所运算的田地的坡度的显示区域,以数值显示田地的坡度的角度,以箭头状的图标104a显示坡度的方位。
[0088]
如图9所示那样,坡度显示部104可以具有能进行坡度的角度以及坡度的方位的校正的操作的坡度变更部105。坡度变更部105具有:能进行坡度的角度的变更操作的角度变更部105a;和能进行坡度的方位的变更操作的方位变更部105b。角度变更部105a例如包含:显示为“ ”且通过被操作来使坡度的大小增加的增加部105a1;和显示为
“‑”
且通过被操作来使坡度的角度减少的减少部105a2。
[0089]
方位变更部105b包含:朝向顺时针方向且通过被操作来将坡度的方位向顺时针变更给定角度的第1箭头部105b1;和朝向逆时针方向且通过被操作来将坡度的方位向逆时针变更给定角度的第2箭头部105b2。
[0090]
显示装置50经由通信装置63将坡度变更部105的操作信息输出到支援装置60,若支援装置60取得操作信息,凹凸运算部73算出相对于基于校正后的坡度的角度以及坡度的方位的基准面f1的凹凸。将凹凸运算部73分配了校正后的第4分割数据d4n的分布图信息作
为校正后的凹凸分布图存储到存储装置62。由此,为了从图9过渡到图10,分布图显示部100能显示基于校正过的坡度的角度以及坡度的方位的凹凸分布图,其中该校正是基于坡度变更部105的变更操作而进行的。
[0091]
此外,如图11所示那样,显示装置50可以显示进行将田地的凹凸平整的平整化作业时的理想面f2的高度。进而,显示装置50可以显示比该理想面f2大且在平整化作业中使移动的表土量(以下,称作移动表土量)。在相关的情况下,农业支援系统1具备理想面运算部74和表土量运算部75。理想面运算部74以及表土量运算部75由运算处理装置61兼用,由该运算处理装置61的cpu、电子电路等构成。
[0092]
理想面运算部74进行理想面f2的高度的运算。如图14所示那样,所谓理想面f2,是田地的凹凸的表土量一致的面,与基准面f1平行。理想面运算部74例如基于凹凸分布图来算出理想面f2的高度。具体地,理想面运算部74基于凹凸运算部73按每个区域qn算出且分别分配到每个区域qn的第4分割数据d4n、和田地的面积,来算出根据坡度进行校正后的田地的土壤的体积。若理想面运算部74算出土壤的体积,则基于该算出的土壤的体积来算出理想面f2的高度。理想面运算部74将理想面f2的高度存储到存储装置62。
[0093]
若表土量运算部75算出理想面f2的高度,则检测比理想面f2更凸的区域qc、即被分配比理想面f2的高度高的第4分割数据d4n的区域qc。若表土量运算部75检测到区域qc,则该检测到的每个区域qc算出理想面f2的高度与第4分割数据d4n的差分,来算出表土量,作为第5分割数据d5n。将表土量运算部75按每个区域qn算出的第5分割数据d5n分别分配到每个区域qn,作为田地的表土量分布图存储到存储装置62。此外,若在存储装置62中存储了表土量分布图,群组设定部71对在表土量分布图中由表土量运算部75分配的每个区域qn的第5分割数据d5n设定群组。
[0094]
如图11所示那样,显示装置50能取代第1画面m1等,而显示能显示理想面分布图和移动表土量的第4画面m4。第4画面m4显示分布图显示部110、显示切换部111、操作部112、图例显示部113、坡度显示部114和理想面显示部115。第4画面m4所显示的分布图显示部110与第1画面m1所显示的分布图显示部80等不同,示出表土量分布图。显示装置50从支援装置60取得存储于存储装置62的表土量分布图,在分布图显示部110显示表土量分布图。在分布图显示部110显示表土量分布图的情况下,分布图显示部110是针对与多个区域qn分别对应的第5分割数据d5n对应于该第5分割数据d5n的大小(值)分配表示表土量的多个群组(多个等级)的分布图。在分布图显示部110中,与状态分布图等同样,按多个区域qn的每一者以颜色、数值、字符等示出群组(等级),以使得能在群组设定部71中识别预先分配的群组(等级)。在图4的示例的情况下,在第4画面m4的多个区域qn内示出的数值表示使移动的表土量。另外,第4画面m4所显示的分布图显示部110可以能切换地显示表土量分布图和凹凸分布图。
[0095]
显示切换部111与第1画面m1所显示的显示切换部81等同样,通过被操作,来将显示于显示装置50的画面从第4画面m4切换为不同的画面。操作部112与第1画面m1所显示的操作部82等同样,能对显示于分布图显示部110的状态分布图进行各种操作。图例显示部113与第1画面m1所显示的图例显示部84等同样,显示群组与显示于分布图显示部110的分布图所对应的分割数据(第4分割数据d4n或第5分割数据d5n)的关系。坡度显示部114与第2画面m2所显示的坡度显示部94等同样,是显示坡度运算部72所运算的田地的坡度的显示区
域,以数值显示田地的坡度的角度,以箭头状的图标114a显示坡度的方位。
[0096]
理想面显示部115是显示理想面运算部74所算出的理想面f2的高度的显示图像。在本实施方式中,理想面显示部115是箭头状的图标,在第4画面m4的分布图显示部110显示凹凸分布图的情况下,通过指示图例显示部113所显示的高度,来显示理想面f2的高度。
[0097]
上述的农业支援系统1具备:取得作业车辆2在田地行驶时的高度的信息取得部61a;和基于作为信息取得部61a所取得的高度的多个高度来运算田地的状态的田地信息运算部61b。根据上述结构,能根据在作业车辆2的行驶时取得的高度来运算田地的状态,能提升掌握田地状态的效率性。
[0098]
此外,农业支援系统1具备显示与信息取得部61a所取得的高度相关的高度信息的显示装置50,显示装置50显示田地的坡度,作为高度信息。根据上述结构,能根据通过作业车辆2的行驶而取得的高度(高度信息)来容易地认识田地的坡度。
[0099]
此外,显示装置50显示作为高度信息而根据高度得到的相对于基准面f1的差分。根据上述结构,通过田地的坡度等,能抑制田地的凹凸的信息被埋没。
[0100]
此外,农业支援系统1具备:高度检测装置43a,其设于作业车辆2,且基于定位卫星z的信号来检测作业车辆2在田地行驶时的高度;和支援装置60,其具备取得高度检测装置43a检测到的高度的信息取得部61a;和基于作为信息取得部61a所取得的高度的多个高度来运算田地的状态的田地信息运算部61b。根据上述结构,能根据在作业车辆2的行驶时取得的高度来运算田地的状态,能提升掌握田地状态的效率性。
[0101]
此外,农业支援系统1具备显示与信息取得部61a所取得的高度相关的高度信息的显示装置50,显示装置50显示田地的坡度,作为高度信息。根据上述结构,能根据通过作业车辆2的行驶而取得的高度(高度信息)来容易地认识田地的坡度。
[0102]
此外,农业支援系统1具备显示与信息取得部61a所取得的高度相关的高度信息的显示装置50,显示装置50显示作为高度信息而根据高度得到的相对于基准面f1的差分。根据上述结构,通过田地的坡度等,能抑制田地的凹凸的信息被埋没。
[0103]
[第2实施方式]
[0104]
图12表示农业支援系统1的其他实施方式(第2实施方式)。在第1实施方式中的农业支援系统1中,田地信息运算部61b运算田地的坡度、凹凸,作为田地的状态,但也可以是运算田地的表土深度作为田地的状态来取代田地的坡度、凹凸这样的结构。在相关的情况下,显示装置50显示田地信息运算部61b所运算出的田地的表土深度。
[0105]
以下,对第2实施方式的农业支援系统1以与上述的实施方式(第1实施方式)不同的结构为中心进行说明,对与第1实施方式共通的结构标注相同附图标记并省略详细的说明。
[0106]
如图12所示那样,田地信息运算部61b具有表土深度运算部76。表土深度运算部76由运算处理装置61所具有的电气/电子部件、电气电路以及存放于存储装置62的程序等构成。
[0107]
表土深度运算部76基于作为多个高度而由信息取得部61a取得的第1高度和第2高度来运算田地的状态。详细说明第1高度以及第2高度,第1高度是使作业车辆2在给定的第1时期行驶时的高度,第2高度是使作业车辆2在与第1时期不同的第2时期行驶时的高度。为了以下的说明的方便,有时将在第1时期行驶的作业车辆2说明为第1作业车辆2a,将在第2
时期行驶的作业车辆2说明为第2作业车辆2b。例如,第1作业车辆2a是牵引进行耕耘的耕耘装置的拖拉机2a,第2作业车辆2b是插秧机2b。为此,如图14所示那样,第1作业车辆(拖拉机)2a在田地中的表土的表面行驶,第1高度是表土的表面的高度。另一方面,第2作业车辆(插秧机)2b在田地中的硬土层的表面行驶,第2高度是硬土层的表面的高度。
[0108]
第1时期是拖拉机2a牵引耕耘装置进行田地的耕耘作业的时期,第2时期是插秧机2b在田地进行插秧的时期。此外,设于第1作业车辆2a的高度检测装置43a(以下,称作第1检测装置43a1)进行第1高度的检测,设于第2作业车辆2b的高度检测装置43a(以下,称作第2检测装置43a2)进行第2高度的检测。
[0109]
另外,第1作业车辆2a以及第2作业车辆2b的组合并不限定于上述的组合,第1作业车辆2a也可以是拖拉机2a,第2作业车辆2b也可以是联合收割机2c,根据进行运算的田地的状态来选择即可。
[0110]
以下,详细说明表土深度运算部76所进行的田地的状态(表土深度)的运算。首先,在第1时期,第1作业车辆2a在田地进行行驶,第1检测装置43a1检测第1高度。此外,第1作业车辆2a优先移动到作业车辆2的接地面水平且比较硬质的任意的基准位置,第1检测装置43a1在该基准位置检测第1基准高度。基准位置例如是与田地相邻且由混凝土、沥青等构成的道路。接下来,在第2时期,第2作业车辆2b在田地进行行驶,第2检测装置43a2检测第2高度。此外,第2作业车辆2b移动到第1检测装置43a1检测到第1基准高度的基准位置,第2检测装置43a2在该基准位置检测第2基准高度。
[0111]
表土深度运算部76从存储装置62取得分布图运算部70对多个区域qn分别分配分割数据而得到的田地的状态分布图,基于该状态分布图来运算田地中的表土深度。另外,在以下的说明中,将基于第1高度的第1分割数据d1n称作第1数据d7n,将基于第2高度的第1分割数据d1n称作第2数据d8n。此外,在以下的说明中,将与第1高度对应的状态分布图称作第1状态分布图,将与第2高度对应的状态分布图称作第2状态分布图,第1状态分布图和第2状态分布图的网格尺寸一致,且第1状态分布图的区域qn和第2状态分布图的区域qn是共通的。
[0112]
在第2实施方式中,在分布图运算部70基于第1高度对多个区域qn分配第1数据d7n的情况下,该分布图运算部70与第1实施方式不同,用第1基准高度来校正第1高度,用第2基准高度来校正第2高度。具体地,分布图运算部70算出作为信息取得部61a所取得的第1高度的多个第1高度与第1基准高度的差分,分别作为第1数据d7n,基于高度数据的纬度以及经度来对检测到高度的每个位置分配分割数据。此外,在分布图运算部70基于第2高度对多个区域qn分配第2数据d8n的情况下,该分布图运算部70与第1实施方式不同,算出作为信息取得部61a所取得的第2高度的多个第2高度与第2基准高度的差分,分别作为第2数据d8n,基于高度数据的纬度以及经度来对检测到高度的每个位置分配分割数据。
[0113]
表土深度运算部76从存储部41取得第1状态分布图和第2状态分布图,基于该第1状态分布图以及第2状态分布图来按各个区域qn的每一者算出表土深度。即,表土深度运算部76基于用第1基准高度校正第1高度而得到的高度与用第2基准高度校正第2高度而得到的高度的差,来算出表土深度。详细地,表土深度运算部76通过算出第1数据d7n与第2数据d8n的差分,来按每个区域qn算出表土深度。即,在本实施方式中,每个区域qn的表土深度根据插秧机2b(第2作业车辆2b)的第2检测装置43a2检测到的第2高度与第2基准高度的差分
(第2高度-第2基准高度)、与拖拉机2a(第1作业车辆2a)的第1检测装置43a1检测到的第1高度与第1基准高度的差分(第1高度-第1基准高度)的差分来算出。将表土深度运算部76按每个区域qn算出的表土深度(第7分割数据d9n)分别分配到每个区域qn,作为田地的表土深度分布图存储到存储装置62。此外,若在存储装置62中存储了表土深度分布图,群组设定部71就针对在表土深度分布图中由表土深度运算部76分配的每个区域qn的第7分割数据d9n设定群组。
[0114]
如图13所示那样,显示装置50能显示表示作业车辆2所行驶的田地的周边地图的第5画面m5。第5画面m5能显示田地信息运算部61b所运算出的田地的表土深度,作为高度信息。第5画面m5显示分布图显示部120、显示切换部121、操作部122和图例显示部123。第5画面m5所显示的分布图显示部120与第1画面m1所显示的分布图显示部120不同,示出表土深度分布图。显示装置50从支援装置60取得存储于存储装置62的表土深度分布图,在分布图显示部120显示表土深度分布图。分布图显示部120是针对与多个区域qn分别对应的第7分割数据d9n对应于该第7分割数据d9n的大小(值)来分配表示田地的高度的多个群组(多个等级)的分布图。在分布图显示部120中,与状态分布图等同样,按多个区域qn的每一者以颜色、数值、字符等示出群组(等级),以使得能识别在群组设定部71中预先分配的群组(等级)。在图13的示例的情况下,在第5画面m5的多个区域qn内示出的数值表示表土深度。显示切换部121与第1画面m1所显示的显示切换部121等同样,通过被操作,将显示于显示装置50的画面从第5画面m5切换为不同的画面。操作部122与第1画面m1所显示的操作部122等同样,能对显示于分布图显示部120的状态分布图进行各种操作。此外,图例显示部123与第1画面m1所显示的图例显示部123等同样,显示群组与第7分割数据d9n的关系。
[0115]
上述的信息取得部61a取得使作业车辆2在第1时期行驶时的高度即第1高度和使作业车辆2在第2时期行驶时的高度即第2高度,田地信息运算部61b基于作为多个高度而由信息取得部61a取得的第1高度和第2高度,来运算田地的状态。根据上述结构,能提升田地的状态的运算精度。
[0116]
此外,田地信息运算部61b基于第1高度与第2高度的差来运算田地的表土深度,作为田地的状态。根据上述结构,能比较简单地运算表土深度。
[0117]
此外,信息取得部61a取得作业车辆2在第1时期位于给定的基准位置时的高度即第1基准高度和作业车辆2在第2时期位于基准位置时的高度即第2基准高度,田地信息运算部61b基于用第1基准高度校正第1高度而得到的高度与用第2基准高度校正第2高度而得到的高度的差来运算田地的表土深度,作为田地的状态。根据上述结构,即使在第1时期和第2时期、第1高度和第2高度的基准的高度发生变化的情况下,也能用给定的基准位置进行校准。由此,能精度良好地运算田地的表土深度。
[0118]
此外,高度检测装置43a包含设于在第1时期进行作业的作业车辆2即第1作业车辆2a的第1检测装置43a1、和设于在第2时期进行作业的作业车辆2即第2作业车辆2b的第2检测装置43a2,信息取得部61a取得第1检测装置43a1检测到的高度即第1高度和第2检测装置43a2检测到的高度即第2高度,田地信息运算部61b基于作为多个高度而由信息取得部61a取得的第1高度和第2高度来运算田地的状态。根据上述结构,能提升田地的状态的运算精度。
[0119]
此外,田地信息运算部61b基于第1高度与第2高度的差来运算田地的表土深度,作
为田地的状态。根据上述结构,能比较简单地运算表土深度。
[0120]
此外,信息取得部61a取得第1作业车辆2a位于给定的基准位置时由第1检测装置43a1检测到的高度即第1基准高度、和第2作业车辆2b位于基准位置时由第2检测装置43a2检测到的高度即第2基准高度,田地信息运算部61b基于用第1基准高度校正第1高度而得到的高度与用第2基准高度校正第2高度而得到的高度的差来运算田地的表土深度,作为田地的状态。根据上述结构,即使在第1检测装置43a1和第2检测装置43a2的基准的高度不同的情况下,也能以给定的基准位置进行校准。由此,能精度良好地运算田地的表土深度。
[0121]
以上,对本发明进行了说明,但应该认为本次公开的实施方式在所有方面都是例示而不是限制性的。本发明的范围不是由上述的说明示出,而是由权利要求书示出,意在包含与权利要求书等同的意义以及范围内的全部变更。
[0122]-符号说明-[0123]1ꢀꢀꢀꢀ
农业支援系统
[0124]2ꢀꢀꢀꢀ
作业车辆
[0125]
2a
ꢀꢀꢀ
拖拉机(第1作业车辆)
[0126]
2b
ꢀꢀꢀ
插秧机(第2作业车辆)
[0127]
43a
ꢀꢀ
高度检测装置
[0128]
44a1 第1检测装置
[0129]
44a2 第2检测装置
[0130]
50
ꢀꢀꢀ
显示装置
[0131]
60
ꢀꢀꢀ
支援装置(服务器)
[0132]
61
ꢀꢀꢀ
运算处理装置
[0133]
61a
ꢀꢀ
信息取得部
[0134]
61b
ꢀꢀ
田地信息运算部
[0135]
f1
ꢀꢀꢀ
倾斜面(基准面)
[0136]zꢀꢀꢀꢀ
定位卫星。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。