1.本发明涉及飞行器飞行操纵系统技术领域,具体涉及一种飞行操纵系统传动性能的计算及优化方法。
背景技术:
2.飞行操纵系统在飞行器的飞行过程中承担着改变飞机状态、轨迹等功能和任务。据有关资料统计,当飞行操纵系统出现故障时所造成的后果,大多是重大的飞行事故。另外若是操纵系统不完善,则易造成飞行员出现误操作,而这种误操作造成的结果往往是机毁人亡。因此,飞行操纵系统的可靠性对飞行安全有至关重要的作用。
3.随着运输和作战的需要,对飞行器的速度、机动性要求不断地提高,进而对飞行操纵系统的要求也随之提高,为了满足飞行安全、飞行速度以及机动性等要求,人们在不断完善飞行操纵系统的设计过程。
4.在飞行操纵系统的设计过程中,其传动系统运动部件的外形尺寸、传动比、传动性能、部件强度刚度等参数是设计的主要内容,是影响飞行操纵系统设计成败的关键,同时也是飞行器飞行安全的主要影响因素。
5.现有技术中采用的是画运动模线的方法(模线法)对飞行操纵系统进行设计,但是模线法存在效率低、误差大的问题。
技术实现要素:
6.为了克服现有技术的不足,本发明提供一种飞行操纵系统传动性能的计算及优化方法,解决了利用模线法进行飞行操纵系统设计,存在效率低、误差大的技术问题,从而达到实现传动系统可视化和精确化设计,提高工程设计质量、优化体系设计、缩短设计周期、降低研制成本的目的。
7.为解决上述问题,本发明所采用的技术方案如下:
8.一种飞行操纵系统传动性能的计算及优化方法,包括以下步骤:
9.利用catia软件的md2模块的参数化设计功能和关联设计功能建立操纵系统运动机构的数字模型;
10.以建立的数字模型为基础,利用catia软件的dmu模块建立操纵系统各个机构之间的运动模型;
11.以建立的运动模型为基础,利用catia软件的simulation模块进行运动仿真模拟,并对传感装置监控的数据进行记录、分析、保存以及绘制曲线,完成操纵系统运动机构的优化设计;
12.其中,所述数字模型中包含操纵系统运动机构的几何参数和位置参数,在对几何参数或位置参数进行更改或更新时,所述数字模型将自动进行整体优化。
13.作为本发明优选的实施方式,在建立数字模型时,包括:
14.利用所述md2模块的参数化设计功能将操纵系统运动机构的几何参数和位置参数
在模型结构树上进行表示;
15.利用所述md2模块的关联设计功能将所述模型结构树上的几何参数和位置参数进行关联设计;
16.其中,所述几何参数包括摇臂几何参数、相邻摇臂支座间的支架几何参数以及相邻摇臂间的拉杆几何参数;所述位置参数包括摇臂位置参数、相邻摇臂支座间的支架位置参数以及相邻摇臂间的拉杆位置参数。
17.作为本发明优选的实施方式,在建立数字模型时,还包括:
18.利用所述md2模块的参数化设计功能建立机构支点坐标、转轴方向li(i=1,2,3);
19.以支点坐标为基准,利用所述md2模块的关联设计功能,建立摇臂的运动平面,在所述运动平面内设置摇臂的几何参数;
20.利用所述md2模块的外部应用功能建立(i-1)与i之间的拉杆;
21.其中,所述拉杆的参数由支撑拉杆两端的摇臂确定;所述摇臂的几何参数包括:摇臂的半径、安装角、双摇臂夹角。
22.作为本发明优选的实施方式,在建立运动机构支点坐标、转轴方向li(i=1,2,3)时,包括:以oi为原点oi,摇臂转轴为oiz轴,摇臂o
iai
为oix轴建立局部坐标系;
23.其中,oix、oiy、oiz的方向余弦分别为[l
1 l
2 l3]、[m
1 m
2 m3]、[n
1 n
2 n3]。
[0024]
作为本发明优选的实施方式,在建立局部坐标系后,包括:利用建立的局部坐标系,求出o
(i-1)1
和b
(i-1)1
点在所述局部坐标系下的坐标,如o
(i-1)j1
和b
(i-1)j1
所示:
[0025][0026]
其中,x
o(i-1)j1
、y
o(i-1)j1
、z
o(i-1)j1
为o
(i-1)j1
在局部坐标系下的x轴、y轴、z轴的投影;
[0027]
[l1、l2、l3]为局部坐标系下的ox轴的方向余弦;
[0028]
[n1、n2、n3]为局部坐标系下的oy轴的方向余弦;
[0029]
[m1、m2、m3]为局部坐标系下的oz轴的方向余弦;
[0030]
x
o(i-1)t
、y
o(i-1)t
、z
o(i-1)t
为o
(i-1)t
在机身坐标系下的x轴、y轴、z轴的投影;
[0031]
x
oit
、y
oit
、z
oit
为o
it
在机身坐标系下的x轴、y轴、z轴的投影;
[0032][0033]
其中,x
b(i-1)j1
、y
b(i-1)j1
、z
b(i-1)j1
为b
(i-1)j1
在局部坐标系下的x轴、y轴、z轴的投影;
[0034]
[l1、l2、l3]为局部坐标系下的ox轴的方向余弦;
[0035]
[n1、n2、n3]为局部坐标系下的oy轴的方向余弦;
[0036]
[m1、m2、m3]为局部坐标系下的oz轴的方向余弦;
[0037]
x
o(i-1)t
、y
o(i-1)t
、z
o(i-1)t
为o
(i-1)t
在机身坐标系下的x轴、y轴、z轴的投影;
[0038]
x
oit
、y
oit
、z
oit
为o
it
在机身坐标系下的x轴、y轴、z轴的投影。
[0039]
作为本发明优选的实施方式,在求出o
(i-1)1
和b
(i-1)1
点在局部坐标系下的坐标后,
包括:利用求得的b
(i-1)j1
坐标,假设运动机构i转动角度为α,ai转动后的坐标点a
ij1
为(rcosα rsinα 0),根据运动机构i和拉杆的运动关系,得到运动机构i和拉杆的运动方程,如公式1所示:
[0040]
(rcosα-x
ij1
)2 (rsinα-y
ij1
)2 (0-z
ij1
)2=l2ꢀꢀꢀ
(公式1);
[0041]
其中,r为摇臂半径;
[0042]
α为运动机构i转动角度;
[0043]
l为拉杆长度;
[0044]
x
bij1
、y
bij1
、z
bij1
为局部坐标系下b点的坐标;
[0045]
根据所述公式1求解出α,进而计算出a和b的运动点a
ij1
和b
ij1
。
[0046]
作为本发明优选的实施方式,在建立摇臂的运动平面时,包括:计算运动机构(i-1)输出摇臂的有效半径,即o
i-1
距直线b
i-1ai
的距离,如公式-2所示:
[0047][0048]
其中,r
(i-1)出(上)
为运动机构i-1输出摇臂的有效力臂;
[0049]
x
o(i-1)j
、y
o(i-1)j
、z
o(i-1)j1
为o
(i-1)j1
在局部坐标系下的x轴、y轴、z轴的投影;
[0050]
x
aij1
、y
aij1
、z
aij1
为局部坐标系下a点的坐标;
[0051]
x
b(i-1)j1
、y
b(i-1)j1
、z
b(i-1)j1
为局部坐标系下a点的坐标。
[0052]
作为本发明优选的实施方式,在建立摇臂的运动平面时,包括:计算运动机构i输入摇臂的有效半径,即oi距直线b
i-1ai
的距离,如公式3所示:
[0053][0054]
其中,r
i入(上)
为运动机构i输入摇臂的有效力臂;
[0055]
x
oij
、y
oij
、z
oij
为o
oij
在局部坐标系下的x轴、y轴、z轴的投影;
[0056]
x
aij1
、y
aij1
、z
aij1
为局部坐标系下a点的坐标;
[0057]
x
b(i-1)j1
、y
b(i-1)j1
、z
b(i-1)j1
为局部坐标系下a点的坐标。
[0058]
作为本发明优选的实施方式,在建立运动模型时,包括:
[0059]
利用catia软件的dmu模块将所有的操纵支架在一个part内进行位置设置;
[0060]
利用dmu模块中的固定件模块将支架与机体结构进行固定;
[0061]
利用dmu模块中的旋转接头模块将摇臂与支架之间建立旋转约束;
[0062]
利用dmu模块中的旋转接头模块将摇臂与拉杆之间建立旋转约束;
[0063]
利用dmu模块中的刚体接头模块将舵面和舵面摇臂进行固定;
[0064]
利用dmu模块在舵面摇臂与支架运动之间增加驱动,完成运动模型的建立。
[0065]
作为本发明优选的实施方式,在将摇臂与拉杆之间建立旋转约束时,包括:在出现运动有挠度的地方,利用dmu模块中的圆球接头模块在所述摇臂的一端建立旋转约束,利用dmu模块中的万向接头模块在所述摇臂的另一端利用建立旋转约束。
[0066]
作为本发明优选的实施方式,在将摇臂与拉杆之间建立旋转约束时,包括:在出现运动有挠度的地方,利用旋转接头模块在所述摇臂上建立两个方向垂直的旋转接头。
[0067]
作为本发明优选的实施方式,在进行运动仿真模拟时,包括:
[0068]
利用catia软件的simulation模块设置驱动角度,激活传感装置;
[0069]
利用catia软件的simulation模块选择传感装置所要监控的运动机构,并对监控的数据进行显示和记录;
[0070]
根据记录数据,利用catia软件的simulation模块绘制运动机构的运动曲线。
[0071]
相比现有技术,本发明的有益效果在于:
[0072]
(1)本发明利用工程仿真分析软件的运动仿真功能对传动系统的传动部件进行有效的分类,并把对传动性能有影响的部件进行参数化设计,从而能够直观的表现出运动干涉情况及更改效果;
[0073]
(2)本发明计算速度快、计算准确率高,对设计更改效率有较大的提高。
[0074]
下面结合附图和具体实施方式对本发明作进一步详细说明。
附图说明
[0075]
图1-是本发明实施例的飞行操纵系统传动性能的计算及优化方法步骤图;
[0076]
图2-是本发明实施例的飞机飞行操纵系统典型运动环节图;
[0077]
图3-是本发明实施例的模型结构树示意图;
[0078]
图4-是本发明实施例的摇臂参数设置示意图;
[0079]
图5-是本发明实施例的拉杆建立示意图;
[0080]
图6-是本发明实施例的运动模型常用运动模块示意图;
[0081]
图7-是本发明实施例的驱动角度设置对话框图;
[0082]
图8-是本发明实施例的sensors对话框图;
[0083]
图9-是本发明实施例在驱动角度为-26度时的运动角度示意图;
[0084]
图10-是本发明实施例的各个机构的运动情况示意图。
具体实施方式
[0085]
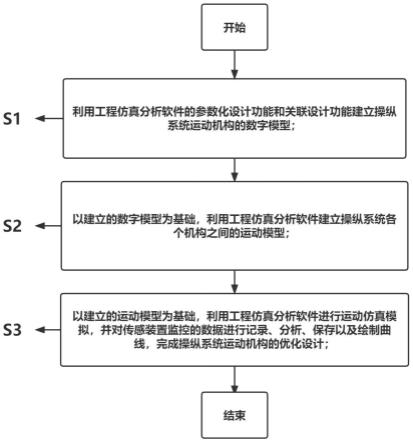
本发明所提供的飞行操纵系统传动性能的计算及优化方法,如图1所示,包括以下步骤:
[0086]
步骤s1:利用工程仿真分析软件的参数化设计功能和关联设计功能建立操纵系统运动机构的数字模型;
[0087]
步骤s2:以建立的数字模型为基础,利用工程仿真分析软件建立操纵系统各个机构之间的运动模型;
[0088]
步骤s3:以建立的运动模型为基础,利用工程仿真分析软件进行运动仿真模拟,并
对传感装置监控的数据进行记录、分析、保存以及绘制曲线,完成操纵系统运动机构的优化设计;
[0089]
其中,数字模型中包含操纵系统运动机构的几何参数和位置参数,在对几何参数或位置参数进行更改或更新时,数字模型将自动进行整体优化。
[0090]
本发明所提及的工程仿真分析软件包括除catia软件以外的其他工程仿真分析软件。
[0091]
本发明的数字化设计方法利用工程仿真分析软件进行模线化建立数字模型,利用工程仿真分析软件对运动机构的运动规律和轨迹进行定义和约束,利用工程仿真分析软件进行运动机构仿真模拟,在此过程中利用传感装置对数据进行监控。本发明通过“参数化设计”和“关联设计”快速实现参数更改和更新,从而快速对系统进行优化设计。
[0092]
在上述步骤s1中,在建立数字模型时,包括:
[0093]
利用catia软件的md2模块的参数化设计功能将操纵系统运动机构的几何参数和位置参数在模型结构树上进行表示,模型结构树如图3所示;
[0094]
利用catia软件的md2模块的关联设计功能将模型结构树上的几何参数和位置参数进行关联设计,如图4所示;
[0095]
其中,几何参数包括摇臂几何参数、相邻摇臂支座间的支架几何参数以及相邻摇臂间的拉杆几何参数;所述位置参数包括摇臂位置参数、相邻摇臂支座间的支架位置参数以及相邻摇臂间的拉杆位置参数。
[0096]
具体地,对摇臂的位置、相邻摇臂支座间的支架和相邻摇臂间的拉杆进行关联设计,使得在改变摇臂位置参数或几何参数时,与之相连接的拉杆或者支座都同时跟随改动,以方便后面对系统进行优化。
[0097]
在上述步骤s1中,在建立数字模型时,还包括:
[0098]
利用md2模块的参数化设计功能建立机构支点坐标、转轴方向li(i=1,2,3);
[0099]
以支点坐标为基准,利用md2模块的关联设计功能,建立摇臂的运动平面,在运动平面内设置摇臂的几何参数;
[0100]
利用md2模块的外部应用功能建立(i-1)与i之间的拉杆,如图5所示;
[0101]
其中,拉杆的参数由支撑拉杆两端的摇臂确定;摇臂的几何参数包括:摇臂的半径、安装角、双摇臂夹角。
[0102]
具体地,当对摇臂参数进行改变时,拉杆的参数随之改变。
[0103]
具体地,通过以上方式建立整个操纵系统运动机构的数字模型,运动机构几何参数全部显示在结构树上,双击即可更改,数据更改后数字模型可自动更新。
[0104]
进一步地,在建立运动机构支点坐标、转轴方向li(i=1,2,3)时,包括:以oi为原点oi,摇臂转轴为oiz轴,摇臂o
iai
为oix轴建立局部坐标系;
[0105]
其中,oix、oiy、oiz的方向余弦分别为[l
1 l
2 l3]、[m
1 m
2 m3]、[n
1 n
2 n3]。
[0106]
更进一步地,在建立局部坐标系后,包括:利用建立的局部坐标系,求出o
(i-1)1
和b
(i-1)1
点在局部坐标系下的坐标,如o
(i-1)j1
和b
(i-1)j1
所示:
[0107][0108]
其中,x
o(i-1)j1
、y
o(i-1)j1
、z
o(i-1)j1
为o
(i-1)j1
在局部坐标系下的x轴、y轴、z轴的投影;
[0109]
[l1、l2、l3]为局部坐标系下的ox轴的方向余弦;
[0110]
[n1、n2、n3]为局部坐标系下的oy轴的方向余弦;
[0111]
[m1、m2、m3]为局部坐标系下的oz轴的方向余弦;
[0112]
x
o(i-1)t
、y
o(i-1)t
、z
o(i-1)t
为o
(i-1)t
在机身坐标系下的x轴、y轴、z轴的投影;
[0113]
x
oit
、y
oit
、z
oit
为o
it
在机身坐标系下的x轴、y轴、z轴的投影。
[0114][0115]
其中,x
b(i-1)j1
、y
b(i-1)j1
、z
b(i-1)j1
为b
(i-1)j1
在局部坐标系下的x轴、y轴、z轴的投影;
[0116]
[l1、l2、l3]为局部坐标系下的ox轴的方向余弦;
[0117]
[n1、n2、n3]为局部坐标系下的oy轴的方向余弦;
[0118]
[m1、m2、m3]为局部坐标系下的oz轴的方向余弦;
[0119]
x
o(i-1)t
、y
o(i-1)t
、z
o(i-1)t
为o
(i-1)t
在机身坐标系下的x轴、y轴、z轴的投影;
[0120]
x
oit
、y
oit
、z
oit
为o
it
在机身坐标系下的x轴、y轴、z轴的投影。
[0121]
以飞机飞行操纵系统为例说明。由于飞机中传动部件位置分布比较广,导致坐标比较大,再解运动方程时容易出现数据溢出,飞机越大此类问题越明显。为了计算方便,特引入三个坐标系:
[0122]
(1)机体坐标系:采用民用飞机机体坐标系的通用定义,坐标原点o为机头顶点;ox轴为飞机水平基准面与机身纵向对称面的交线,指向航向的后方为正;oy轴位于飞机水平基准面内,垂直于纵轴ox,指向航向的右方为正;oz轴位于飞机纵向对称面内,垂直于横轴oy,向上为正;
[0123]
(2)局部坐标系:以摇臂转轴中心点为原点,以转轴和输入摇臂分别为一坐标轴,另一坐标轴按右手规则确定;
[0124]
(3)机翼坐标系:副翼操纵系统运动部件的安装位置,运动方程等数据在机体坐标系中难以简化和整理,因此增加机翼坐标系进行处理。选取机翼坐标系时可以和相应机型的数字样机或其机翼坐标规定相一致。一般机翼坐标系都与机翼安装角、后掠角和上(下)反角有关。
[0125]
三个坐标系之间有相应的转换关系,在机构传动计算时,可根据建立方程的需要,选用合适的坐标系。例如:在局部坐标系中可以方便地表示运动构件的几何参数,便于建立构件的运动方程;在机体坐标系和机翼坐标系中可以方便地表示机构的装机位置、系统结构模线、运动图等,图2为飞机飞行操纵系统典型运动环节图。
[0126]
进一步地,利用求得的b
(i-1)j1
坐标,假设运动机构i转动角度为α,ai转动后的坐标点a
ij1
为(rcosαrsinα0),根据运动机构i和拉杆的运动关系,得到运动机构i和拉杆的运动
方程,如公式1所示:
[0127]
(rcosα-x
ij1
)2 (rsinα-y
ij1
)2 (0-z
ij1
)2=l2ꢀꢀ
(公式1);
[0128]
其中,r为摇臂半径;
[0129]
α为运动机构i转动角度;
[0130]
l为拉杆长度;
[0131]
x
bij1
、y
bij1
、z
bij1
为局部坐标系下b点的坐标;
[0132]
根据公式1求解出α,进而计算出a和b的运动点a
ij1
和b
ij1
。
[0133]
进一步地,在建立摇臂的运动平面时,包括:计算运动机构(i-1)输出摇臂的有效半径,即o
i-1
距直线b
i-1ai
的距离,如公式2所示:
[0134][0135]
其中,r
(i-1)出(上)
为运动机构i-1输出摇臂的有效力臂;
[0136]
x
o(i-1)j
、y
o(i-1)j
、z
o(i-1)j1
为o
(i-1)j1
在局部坐标系下的x轴、y轴、z轴的投影;
[0137]
x
aij1
、y
aij1
、z
aij1
为局部坐标系下a点的坐标;
[0138]
x
b(i-1)j1
、y
b(i-1)j1
、z
b(i-1)j1
为局部坐标系下a点的坐标。
[0139]
进一步地,在建立摇臂的运动平面时,包括:计算运动机构i输入摇臂的有效半径,即oi距直线b
i-1ai
的距离,如公式3所示:
[0140][0141]
其中,r
i入(上)
为运动机构i输入摇臂的有效力臂;
[0142]
x
oij
、y
oij
、z
oij
为o
oij
在局部坐标系下的x轴、y轴、z轴的投影;
[0143]
x
aij1
、y
aij1
、z
aij1
为局部坐标系下a点的坐标;
[0144]
x
b(i-1)j1
、y
b(i-1)j1
、z
b(i-1)j1
为局部坐标系下a点的坐标。
[0145]
在上述步骤s2中,在建立运动模型时,包括:
[0146]
利用catia软件的dmu模块将所有的操纵支架在一个part内进行位置设置;
[0147]
利用dmu模块中的固定件模块将支架与机体结构进行固定;
[0148]
利用dmu模块中的旋转接头模块将摇臂与支架之间建立旋转约束;
[0149]
利用dmu模块中的旋转接头模块将摇臂与拉杆之间建立旋转约束;
[0150]
利用dmu模块中的刚体接头模块将舵面和舵面摇臂进行固定;
[0151]
利用dmu模块在舵面摇臂与支架运动之间增加驱动,完成运动模型的建立。
[0152]
其中,运动模型常用的运动模块,如图6所示。
[0153]
固定件模块:运动机构创建好后,需要指定参考固定件(fixpart),机构运动是相对固定件进行的,因此正确的指定运动机构的固定件才能得到正确的运动结果。
[0154]
旋转接头模块:通过旋转接头,可以让两个零件绕着一轴转动,这两个零件在结合处必须各有一个轴线及一个与轴线正交的平面。将两零件的轴线重合,设置两平面间的距离后,即成为具有一个旋转自由度的旋转接头。
[0155]
刚体接头模块:通过刚体接头,可以使两个零件成为一个刚体,成为刚体后,两零件彼此间相对位置将不改变。
[0156]
进一步地,在将摇臂与拉杆之间建立旋转约束时,包括:在出现运动有挠度的地方,利用dmu模块中的圆球接头模块在摇臂的一端建立旋转约束,利用dmu模块中的万向接头模块在摇臂的另一端利用建立旋转约束。
[0157]
圆球接头模块:通过圆球接头,可以让两个零件绕一圆心转动,这两个零件在结合处必须各有一个圆心。将两零件的圆心重合,即成为具有三个旋转自由度的圆球接头,上述三自由度各自独立,互不影响。
[0158]
万向接头模块:万向接头使用一个虚拟的销连接两杆件,可以传递旋转运动,与旋转接头的区别是两杆件的轴心可以不重合。
[0159]
进一步地,在将摇臂与拉杆之间建立旋转约束时,包括:在出现运动有挠度的地方,利用旋转接头模块在摇臂上建立两个方向垂直的旋转接头。
[0160]
在上述步骤s3中,在进行运动仿真模拟时,包括:
[0161]
利用catia软件的simulation模块设置驱动角度,激活传感装置;
[0162]
利用catia软件的simulation模块选择传感装置所要监控的运动机构,并对监控的数据进行显示和记录;
[0163]
根据记录数据,利用catia软件的simulation模块绘制运动机构的运动曲线。
[0164]
catia软件的simulation模块进行运动仿真模拟时提供了两种模拟方式,一种是使用命令模拟运动(simulation with command),仅单纯进行机构几何操作,不考虑时间问题,没有速度、加速度等分析。另一种是使用法则模拟运动(simulation with law)用户需自定义公式(formula)或法则(law),设置驱动杆件的运动速度,可记录杆件位置、速度与加速度。
[0165]
本发明进行运动仿真模拟的具体过程如下:
[0166]
利用catia软件的simulation模块,可以在驱动角度允许范围内的任意值上观察和检测运动机构角度变化。图7为驱动角度设置对话框,选中activate sensors即可出现sensors对话框,如图8所示。在sensors对话框的selection面板中选择所要监控的机构的observed为yes后,点击instantaneous values出现各个系统在驱动角度为-26度时的运动角度,如图9所示。点击history分步显示各个机构的运动情况,如图10所示,此时可以点击“记录”按钮,保存为.xls格式的文件,并进行运动机构运动曲线的绘制。
[0167]
相比现有技术,本发明的有益效果在于:
[0168]
(1)本发明利用工程仿真分析软件的运动仿真功能对传动系统的传动部件进行有效的分类,并把对传动性能有影响的部件进行参数化设计,从而能够直观的表现出运动干涉情况及更改效果;
[0169]
(2)本发明计算速度快、计算准确率高,对设计更改效率有较大的提高。
[0170]
上述实施方式仅为本发明的优选实施方式,不能以此来限定本发明保护的范围,本领域的技术人员在本发明的基础上所做的任何非实质性的变化及替换均属于本发明所要求保护的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。